 2014-02-05
2014-02-05 1024
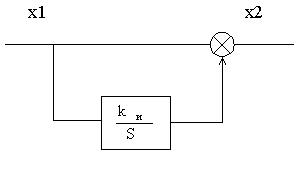
1024В этом случае повышение точности происходит из-за того, что система начинает чувствовать не только наличие ошибки, но и тенденцию к изменению величины. В результате система более быстро реагирует на появление задающих и возмущающих воздействий, что уменьшает ошибку x(t). Структурная схема системы, при введении производной от ошибки будет выглядеть следующим образом:
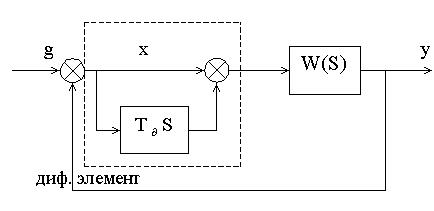 |
 - постоянная времени этого дифференцирующего элемента.
- постоянная времени этого дифференцирующего элемента.
ПРИМЕР 2:
Рассмотрим, как влияет введение дифференцирующего элемента в следящую систему с передаточной функцией из предыдущего примера
 (31)
(31)
 (32)
(32)
делим числитель на знаменатель для определения коэффициентов ошибок:
 (33)
(33)
Сравнивая последние коэффициенты ошибки с коэффициентами для исходной системы можно отметить, что  и
и  не изменились, а коэффициенты
не изменились, а коэффициенты  и другие последующие изменяются с введением регулирования по производным.При соответствующем выборе постоянной времени
и другие последующие изменяются с введением регулирования по производным.При соответствующем выборе постоянной времени  можно добиться того, что
можно добиться того, что  стал равен 0.В отличие от введения изодромного устройства, когда обращается в ноль, первый ненулевой коэффициент ошибки, дифференцирующий элемент на него не влияет, зато он уменьшает последующие коэффициенты.В связи с этим наиболее эффективное снижение установившейся ошибки достигается при одновременном использовании изодромных и дифференцирующих элементов.
стал равен 0.В отличие от введения изодромного устройства, когда обращается в ноль, первый ненулевой коэффициент ошибки, дифференцирующий элемент на него не влияет, зато он уменьшает последующие коэффициенты.В связи с этим наиболее эффективное снижение установившейся ошибки достигается при одновременном использовании изодромных и дифференцирующих элементов.
Компенсация возмущений путём применения метода теории инвариантности.
Системы, в которых достаточна компенсация возмущения, называются инвариантными. САУ инвариантно по отношению к какому-либо воздействию, если после завершения исходного процесса ошибка не зависит от этого воздействия. Основной способ построения инвариантных систем состоит в применении комбинированного управления. Здесь, наряду с управлением по ошибке, также производится управление по внешним воздействиям. Другими словами, в комбинационном управлении осуществляется регулирование по замкнутому и разомкнутому циклам.
Рассмотрим случай, когда кроме регулирования по отклонению x(t), используется регулирование по задающему воздействию g(t).
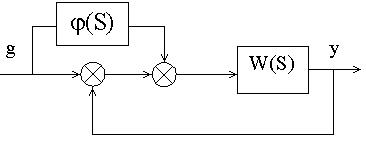 |
Структурная схема такой системы приведена на следующем рисунке:
В случае отсутствия регулирования по задающему воздействию регулируемая величина будет связана с задающим воздействием следующем соотношением:  (34)
(34)
 |
Зависимость регулируемой величины от задающего воздействия по разомкнутому циклу можно определить, преобразовав исходную структурную схему:
 (35)
(35)
Используется принцип суперпозиции, который регулирует значение регулируемой величины: (36)
(36)
тогда эквивалентная передаточная функция замкнутой системы будет иметь следующий вид: (37);
(37);  (38)
(38)
Известно, что  ;
;  (39)
(39)
Из последней формулы можно найти усиление полной инвариантности:
 (40)
(40)
Разложив последнее выражение в ряд, получим следующее соотношение:
 (41)
(41)
Как видно из этой формулы, для получения полной инвариантности необходимо определить первую, вторую и т.д. производные, однако, определение производных выше второго порядка изученными ранее методами не возможно. Поэтому можно говорить только о частичной инвариантности.
Повышение запаса устойчивости (быстродействия) линейной системы.
Повышение запаса устойчивости достигается рациональным выбором параметров системы и введением в неё специальных корректирующих устройств.
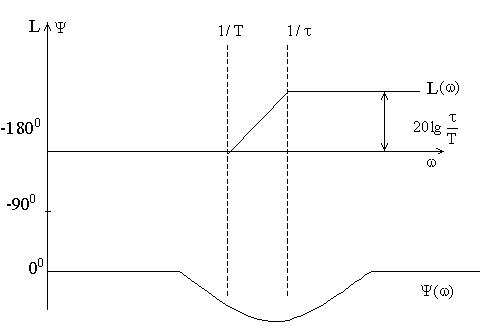
Корректирующие устройства представляют собой звенья с определенными передаточными функциями, требующими быстродействия, получающиеся путем соответствующего выбора основных элементов системы (усилители, датчики и т.д.) и применение нужных корректирующих устройств. Корректирующее устройство производит такое перераспределение нулей и полюсов передаточных функций W(s), Ф(s), при которых САУ удовлетворяет не только условиям устойчивости и качества. Графическая интерпретация действия корректирующих устройств приведена на следующем рисунке:
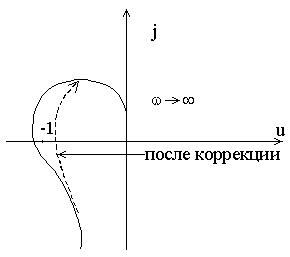
Из рисунка видно, что задачу достижения требуемых качественных показателей можно наглядно трактовать, как задачу коррекции АФХ разомкнутой системы в нужном направлении. Обычно эта задача тесно связана с рассмотренной выше задачей повышения точности.
Корректирующие устройства делятся на три типа: последовательные, параллельные, дополнительно-обратные связи.
 |
Wпку(S) – передаточная функция последовательного корректирующего устройства.
Wпс(S) – передаточная функция параллельного корректирующего устройства.
Wос(S) – передаточная функция дополнительно-обратной связи.
W’(S) – исходная передаточная функция.
В линейных САУ для КУ одного типа можно подобрать эквивалентное КУ другого типа. Связь передаточных функций разных КУ можно установить, приравняв передаточные функций всех разомкнутых систем, изображенных на рисунке.  (42)
(42)
 (43)
(43)
 (44)
(44)
 (45)
(45)
Последовательное корректирующее устройство.
Наибольшее распространение получили электрические последовательные КУ, состоящие из R, L, C элементов. Основными среди этих устройств являются:
1) пассивное интегрируемое звено (замедляющее звено), описываемое передаточной функцией следующего вида:  (46)
(46)
Это звено имеет следующие характеристики:
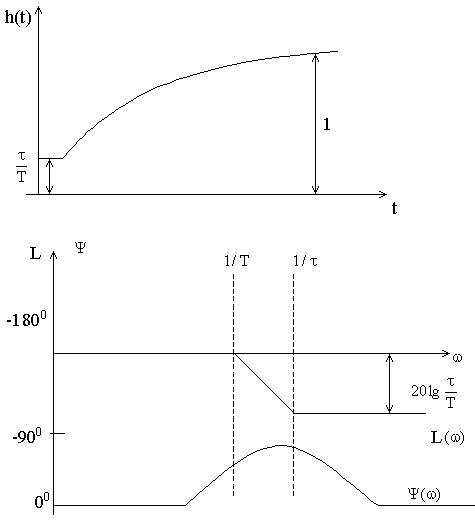
2) 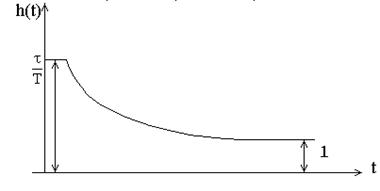
пассивное дифференцирующее звено (форсирующее звено), описываемое той же передаточной функции.  (47)
(47)
3) интегро-дифференцирующее звено является комбинация двух рассмотренных выше звеньев. Его передаточная функция:
 (48)
(48)


Параллельное корректирующее устройство.
 Параллельно основному сигналу чаще всего включают интегрирующие или дифференцирующие звенья.
Параллельно основному сигналу чаще всего включают интегрирующие или дифференцирующие звенья.
 ; (48)
; (48)
Интегрирующие звенья при этом образуют изодромное устройство, применяемое для повышения точности САУ в установившемся режиме.
Дифференцирующие звенья вводят для повышения запаса устойчивости, точности и быстродействия.
Дополнительно обратная связь.
Они могут быть жесткими и гибкими.
Жестко обратная связь действует всё время, гибко обратная связь только при изменении выходной координаты охватываемого звена. В цепи жесткой обратной связи ставится позиционное звено, в цепи гибкой - дифференцирующее. Интегрирующие звенья в цепи обратной связи не ставятся.
ПРИМЕР:
Рассмотрим обхват гибкой и жесткой обратной связи.
Безынерционное звено
1) для жестко обратной связи передаточная функция будет иметь вид:
 (49);
(49); 
В результате обхвата такой связи коэффициент передачи уменьшится.
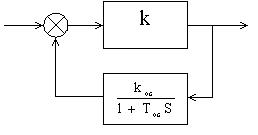 |
В динамическом отклонении это введение эквивалентно включению в систему пассивного дифференцирующего форсирующего звена.
2) для гибко обратной связи передаточная функция будет иметь вид:
 (50)
(50)
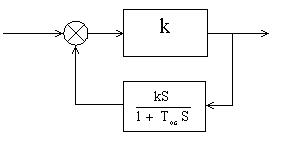 |
В динамическом отношении введение этой обратной связи эквивалентно включению в систему пассивного замедляющего звена.
Постановка задач синтеза линейной системы.
До сих пор рассмотренные вопросы теории ТАР связаны с анализом готовых систем с целью определения их свойств и пути их улучшения. Наиболее сложной и наиболее важной задачей для практики является задача синтеза систем. Она заключается в определении и реализации таких динамических и статических характеристик, которые при заданных ограничениях наилучшим способом следующих этапов:удовлетворяют поставленным требованиям. Обычно её решение состоит из
1) изучение объекта регулирования условий его работы и основные воздействия,
2) формирование требований, предъявляемых к САР,
3) выбор принципа регулирования первоначальной схемы регулятора,
4) выбор элементов р6егулятора с учетом их мощности и надежности,
5) выбор и расчет элементов регулятора и их параметров на основе требований, предъявляемых к статическим и динамическим свойствам системы,
6) экспериментальные исследования Сар и её отдельных частей и внесение корректив,
7) изготовление и монтаж САР,
8) наладка САР в реальных условиях её работы,
9) опытная эксплуатация САР.
По отношению к основе синтеза в настоящее время имеются разные точки зрения.
Мы под синтезом будем понимать инженерную задачу, сводящуюся к такому построению САР, при котором обеспечивается техническое выполнение к ней. В этом случае необходимо получить, во-первых, требуемую точность, а во-вторых, приемлемый характер переходных процессов.








