 2014-02-02
2014-02-02 286
286Мы не будем здесь подробно излагать свойства преобразования Лапласа, отметим лишь наиболее важные для ТАУ свойства.
При нулевых начальных условиях, после преобразования Лапласа уравнения (4), получаем: L{(4)}:
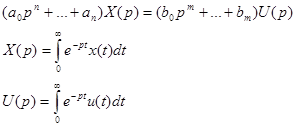
|
Преобразования Лапласа выходного сигнала X(p), отнесенное к преобразованию Лапласа входного сигнала U(p) не зависит от самих сигналов. Это свойство самого объекта.
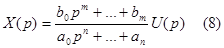
|
Передаточная функция
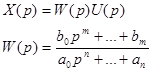
|
(9)
Определение: Передаточной функцией системы (объекта) называется отношение преобразования Лапласа выходного сигнала к входному при нулевых начальных условиях.
Порядок системы – порядок полинома знаменателя передаточной функции
Передаточная функция W(p) зависит только от самих дифференциальных уравнений
Передаточная функция W(p) определена только для линейных уравнений и выражает свойство линейности: если U= U1+U2, то, очевидно:
X(p)=W(p) (U1+U2)= W(p) U1+ W(p) U2 = X1(p) + X2(p)
X(p)=W(p) (g U1)= g W(p) U1
Например, устройство, вычисляющее модуль входного сигнала или квадрат входного сигнала непосредственно не описывается передаточной функцией (почему?).








