 2014-02-24
2014-02-24 1415
1415СТРУКТУРНАЯ СХЕМА, ПРИНЦИП ДЕЙСТВИЯ И ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АПОИ
Существует несколько вариантов построения структурной схемы АПОИ. Рассмотрим один из вариантов, имея в виду отечественные АПОИ-1 и АПОИ-2. Различия в построении АПОИ-1 и АПОИ-2 поясняются по мере необходимости.
На рис. 8.1 приведена структурная схема перспективной АПОИ, основными функциями которой являются:
· обнаружение целей и измерение их координат по сигналам первичного радиолокатора (ПРЛ);
· обнаружение метеообразований и измерение их координат по сигналам ПРЛ;
· обнаружение целей и измерение их координат по сигналам ВРЛ;
· обработка сигналов дополнительной информации В;РЛ;
· межобзорная обработка информации ПРЛ;
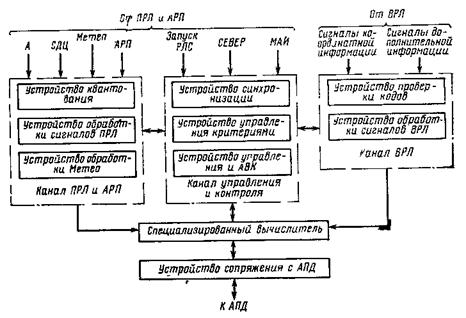
Рис 8 1. Структурная схема перспективной АПОИ
· отождествление и объединение координатной информации ПРЛ и ВРЛ, привязка дополнительной информации к объединенной координатной;
· преобразование полярных координат целей в прямоугольные;
· формирование стандартных сообщений о целях, контурах метеообразований и передача их в АПД.
|
|
|
Кроме того, АПОИ обеспечивает: передачу данных автоматического радиопеленгатора (АРП) в АПД; прием из АПД данных о бланкируемых областях зоны обнаружения и подавление в них помех; прием из АПД управляющей информации для ВРЛ (чередование режимов по стандартам УВД и ИКАО) и для АРП (включение каналов), а также выдачу сигналов управления на соответствующие источники информации; кодирование и передачу в центр УВД меток «Север» и информации о состоянии оборудования РЛК. Все перечисленные функции присущи отечественной АПОИ-2 в полном объеме, а АПОИ-1 - в сокращенном объеме (за исключением функций, связанных с обработкой метеоинформации ПРЛ и данных АРП).
Принцип действия АПОИ заключается в следующем. На вход АПОИ поступают аналоговые сигналы от ПРЛ и ВРЛ, несущие информацию о целях и метеообстановке в зоне действия РЛК. Кроме того, от ПРЛ поступают сигналы синхронизации и другие сигналы, необходимые для работы АПОИ.
Аналоговые сигналы Осн. А, Доп. А, СДЦ, Метео смеш, с выхода ПРЛ поступают в соответствующие каналы устройства квантования, где осуществляется раздельное квантование этих сигналов по амплитуде и дискретизация по времени. Выбор двоично-квантованного сигнала (ДКС) из двух сигналов А и СДЦ для формирования зоны обнаружения согласно рис 6.2 производится с помощью сигналов коммутации К.1, К2 и А, поступающих от ПРЛ, или с помощью аналогичных сигналов, вырабатываемых в АПОИ. Напомним, что сигнал СДЦ на входе АПОИ представляет собой коммутируемую последовательность сигналов Доп. СДЦ/Осн. СДЦ, получаемую на выходе приемного устройства РЛС. После выбора ДКС производятся окончательный выбор одного из сигналов А или СДЦ на основе динамической цифровой карты помех, очистка этого сигнала от помех и критерийная обработка с помощью устройства «движущегося окна», в результате которой принимается решение о наличии (или отсутствии) цели и измерение ее координат - дальности и азимута. В устройстве обработки 'Метео осуществляется обработка ДКС Метео смеш., в результате которой измеряются координаты метеообразований (контуры Метео).
|
|
|
В канале ВРЛ АПОИ (рис. 8.1) производится обработка информации, поступающей от ВРЛ. Устройство обработки сигналов ВРЛ осуществляет критерийную обработку координатных сигналов ВРЛ с помощью устройства «движущегося окна», очистку от помех дополнительной информации и условное кодирование дальности для этой информации.
Объединение информации ПРЛ и ВРЛ осуществляется программным способом в специализированном вычислителе (СВ).При этом СВ производит отождествление координатной информации ПРЛ и ВРЛ, привязку дополнительной информации ВРЛк объединенной координатной, межобзорную обработку неотождествленных пакетов ДКС ПРЛ для выделения ДКС движущихся целей и подавления сигналов неподвижных целей. Специализированный вычислитель обеспечивает хранение информации в течение необходимо времени, формирование стандартных сообщений и передачу их в АПД. '
Аппаратура передачи данных, подключаемая к выходу АПОИ (см. рис. 6.1), обеспечивает передачу обработанной радиолокационной информации со скоростью 2400 бит/с по двум независимым четырехпроходным каналам тональной частоты в центр УВД.
Главными особенностями рассматриваемого варианта АПОИ являются:
· квантование по амплитуде входных сигналов ПРЛ на два уровня с применением двух порогов («медленного» и «быстрого») и автоматического выбора порога в зависимости от текущей помеховой обстановки; %
· автоматический выбор сигналов А или СДЦ ПРЛ на основе динамической цифровой карты помех;
· применение алгоритма безвесовой (критерийной) обработки двоично-квантованных сигналов ПРЛ при автоматическом выборе критериев начала и конца пакета ДКС в зависимости от текущей помеховой обстановки;
· применение алгоритма критерийной обработки декодированных координатных сигналов ВРЛ;
· применение специализированного вычислителя, обеспечивающего выполнение ряда опер'аций обработки информации ПРЛ и ВРЛ программным способом.
Первая особенность связана с применением одного из методов стабилизации уровня ложных тревог, который заключается в автоматической подстройке -порога квантования по амплитуде аналогового сигнала ПРЛ в зависимости от текущей помеховой обстановки Устройства, реализующие этот метод, часто называют нормализаторами уровня ложных тревог. В рассматриваемом случае метод реализуется с помощью двухканальной схемы амплитудного квантователя. Аналоговый сигнал ПРЛ подается одновременно на входы двух квантователей с регулируемыми порогами. В одном канале порог является «медленным», поскольку его регулировка осуществляется с большой постоянной времени на основе оценки текущего уровня помехи. Эта оценка формируется в результате анализа ДКС в пределах кольца дальности, соответствующего концу периода зондирования, и обеспечивает формирование оптимального порога квантования при наличии квазистационарной помехи типа теплового шума.
Во втором канале порог является «быстрым», поскольку его регулировка осуществляется с малой постоянной времени (равной нескольким десяткам микросекунд) на основе оценки текущего уоовня помехи в (пределах нескольких элементов дальности, прилегающих к анализируемому элементу в данный момент времени. Благодаря «быстрой» регулировке порога обеспечивается стабилизация уровня ложных тревог при наличии нестационарных флюктуационных помех, обусловленных отражениями от протяженных по дальности и азимуту целей (метеообразований).
|
|
|
Выбор того или иного канала квантования производится с помощью анализатора помеховой обстановки, который сравнивает число единиц в двоично-квантованных сигналах на выходах квантователей за определенный интервал времени. При превышении числом единиц канала с «быстрым» порогом числа единиц канала с «медленным» порогом в определенное число раз производится выбор первого канала и ДКС с выхода этого канала поступает в тракт дальнейшей обработки.
Необходимо отметить, что при использовании двухканальной схемы квантователя коммутация сигналов ПРЛ для формирования требуемой зоны обнаружения возможна только после квантования сигналов по амплитуде. В противном случае трудно избежать нежелательных переходных процессов в работе регуляторов порогов при коммутации сигналов ПРЛ.
Вторая особенность связана с выбором для междупериодной обработки одного из ДКС типа А или СДЦ. Этот выбор производится автоматически с помощью динамической цифровой карты помех. При этом ячейка секторизации зоны обзора имеет размеры примерно 11° по азимуту и 12,5 км по дальности. Заполнение карты осуществляется в течение одного обзора путем сравнения уровня помех на выходах каналов А и СДЦ. Если в некоторой ячейке секторизации уровень помех на выходе канала А превышает уровень помех на выходе канала СДЦ в определенное число раз, то в соответствующую ячейку памяти карты помех записывается логическая единица и в следующем обзоре производится.выбор в данной ячейке секторизации сигнала СДЦ для дальнейшей обработки. Обновление карты происходит от одного обзора к другому. При этом приоритет отдается каналу А.
Третья особенность состоит в том, что междупериодная обработка пакета импульсов, отраженных от цели, осуществляется при отказе от использования информации о форме огибающей этого пакета. В качестве признака, по которому можно отличить цель от помехи, используется плотность «единиц» ДКС в определенном интервале времени. В этом случае АПОИ производит проверку входного радиолокационного сигнала по совокупности критериев, отфильтровывая сначала все сигналы, амплитуда которых меньше определенного уровня, затем все оставшиеся сигналы, которые не удовлетворяют критерию длительности импульсов, и, наконец, из оставшихся отфильтровываются сигналы, которые не удовлетворяют критерию протяженности пакета единиц ДКС по азимуту. Реализация такой критерийной обработки сигналов в сравнении с весовой обработкой позволяет существенно упростить аппаратуру и обеспечить заданные требования по качеству функционирования и универсальности АПОИ.
|
|
|
При критерийной обработке обнаружение цели и измерение ее координат производятся после проверки принятого сигнала по критерию протяженности пакета единиц ДКС по азимуту для заданного кольца дальности. Если выполняется критерий обнаружения начала пакета, например, по правилу «к из n», то схема обнаружения фиксирует азимут начала пакета QН. При выполнении критерия обнаружения конца пакета, например, по правилу " «l из n» (КК) схема обнаружения фиксирует азимут конца пакета QК и одновременно определяется угловая протяженность пакета DQ-=QК-QН. Если выполняется условие DQmin<DQ< DQmax, где DQmin, DQmax - пороговые значения протяженности пакета по азимуту, то цель считается обнаруженной. Далее определяются оценки азимута цели и дальности по номеру кольца дальности, в котором обнаружена цель. В рассматриваемом варианте АПОИ предусматривается автоматический- выбор критерия начала пакета (значения К) на основе предварительной оценки уровня помех в окрестности анализируемого кольца дальности. Для сопряжения АПОИ с различными типами ПРЛ предусматривается изменение в определенных пределах элемента дальности и пороговых значений к, DQmin и DQmax
Нетрудно видеть, что рассматриваемые особенности АПОИ обеспечивают адаптивные свойства этой аппаратуры, которая может автоматически изменять свои параметры и режимы в зависимости от изменений текущей помеховой обстановки. Благодаря этим свойствам данная аппаратура занимает промежуточное положение между вторым и третьим поколениями АПОИ.








