 2015-01-30
2015-01-30 866
866Рассмотрим механизм типа I (см. рисунок 3.1 а ).
Задачей динамического синтеза в данном случае является определение такого минимального радиус-вектора профиля кулачка  , при котором переменный угол передачи движения
, при котором переменный угол передачи движения  ни в одном положении кулачкового механизма не будет меньше
ни в одном положении кулачкового механизма не будет меньше  . Для этого необходимо построить диаграмму
. Для этого необходимо построить диаграмму  представляющую собой изменение перемещения толкателя (
представляющую собой изменение перемещения толкателя ( ) в зависимости от его скорости (
) в зависимости от его скорости ( ), графически исключив ось
), графически исключив ось  из диаграмм
из диаграмм  и
и  . При этом на получаемой диаграмме (рисунок 3.7) масштабы на обеих осях должны быть между собой равны:
. При этом на получаемой диаграмме (рисунок 3.7) масштабы на обеих осях должны быть между собой равны:
 ,
,
следовательно, при построении диаграммы необходимо пересчитать эти масштабы в какой-либо один.
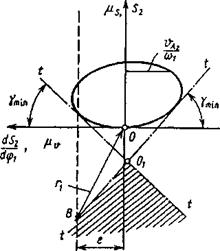
Рисунок 3.7. Схема к определению минимального радиуса кулачка.
К построенной диаграмме проводим предельные касательные t t под углом  к оси абсцисс. Эти касательные продолжаем до их взаимного пересечения в точке O1. Заштрихованная область, определяемая пересечением предельных касательных t t, является областью центров вращения кулачков. Если углы
к оси абсцисс. Эти касательные продолжаем до их взаимного пересечения в точке O1. Заштрихованная область, определяемая пересечением предельных касательных t t, является областью центров вращения кулачков. Если углы  и
и  не равны между собой, то точка O1 не будет расположена на оси
не равны между собой, то точка O1 не будет расположена на оси  . Минимальное значение получится в том случае, если центр вращения кулачка расположить в точке пересечения касательных O1. Оно будет равно расстоянию = OO1. Расстояние от принятого центра вращения кулачка до линии перемещения толкателя дает величину эксцентриситета е. В зависимости от выбора точки центра вращения кулачка, его можно сделать центральным или дезаксиальным.
. Минимальное значение получится в том случае, если центр вращения кулачка расположить в точке пересечения касательных O1. Оно будет равно расстоянию = OO1. Расстояние от принятого центра вращения кулачка до линии перемещения толкателя дает величину эксцентриситета е. В зависимости от выбора точки центра вращения кулачка, его можно сделать центральным или дезаксиальным.
Рассмотрим механизм типа III (см. рисунок 3.1 в).
Тем же методом графического исключения параметра строится диаграмма зависимости  (рисунок 3.8). Масштабы на обеих осях также должны быть между собой равны:
(рисунок 3.8). Масштабы на обеих осях также должны быть между собой равны:

Полученная кривая расположится в первом и втором квадрантах координатной системы.
Проводим предельную касательную АВ к кривой в отрицательной области ускорений под углом 45° к оси . Она пересечет ось ординат в точке В. Несколько увеличенный отрезок ОВ с учетом масштаба является минимальным радиусом кулачка

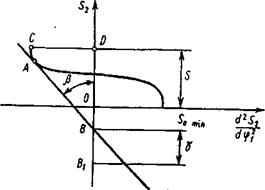
Рисунок 3.8. Схема к определению минимального радиуса кулачка.
Механизм с плоским толкателем.
Рассмотрим механизм типа II (см. рисунок 3.1 б).
Порядок построения: В произвольном месте выбирается точка Со, из которой радиусом, равным длине толкателя, проводят дугу окружности. По хордам откладывают перемещения т.В. Полученные точки последовательно соединяют с т.Со.
1. На этих прямых и на их продолжении откладываются отрезки кинематических отношений, посчитанные в масштабе μs* по вышеприведенной формуле. Там, где отрезок имеет максимальное значение, восстанавливается перпендикуляр, и под углом [θ] проводится луч.
2. 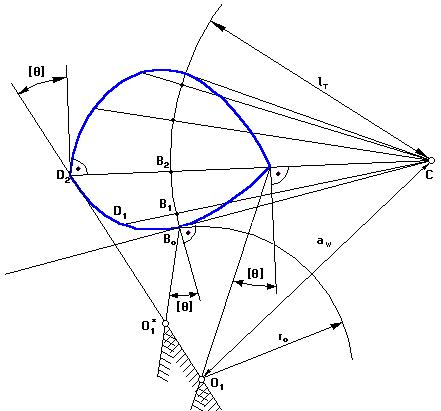 Если учитывать реверс, то второй луч проводят под углом [θ] через отрезок кинематических отношений, отложенный под углом в 90º по направлению реверса и имеющий максимальное значение. Центр кулачка будет в т.О1*:
Если учитывать реверс, то второй луч проводят под углом [θ] через отрезок кинематических отношений, отложенный под углом в 90º по направлению реверса и имеющий максимальное значение. Центр кулачка будет в т.О1*:
ro = O1Bo
Рисунок 3.9. Схема к определению минимального радиуса кулачка. Механизма с качающимся толкателем.
Если реверс не учитывать, то второй луч проводят через т.Во под углом [θ]. Центр кулачка будет в т.О1*:
ro = O1*Bo








