 2015-02-04
2015-02-04 456
456Для построения внутреннего представления каждого функционального блока необходимо:
· определить и идентифицировать входные и выходные сигналы блока;
· указать имена всех формальных параметров ФБ;
· нарисовать внутреннюю схему блока, которая практически соответствует построенной ранее СММУ
Верификацию схемы структурной модели каждого макроблока целесообразно проводить с использованием специально построенной модели испытания функционального блока при тестовых значениях параметров. Эти значения в большинстве случаев не соответствуют реальным заданным параметрам и выбираются из расчета, что при постановке имитационных экспериментов должны быть получены прогнозируемые или аналитически рассчитанные динамические характеристики.
Структурная модель испытания функционального блока дополнительно к модели, отражающей его внутреннюю структуру как на математическом, так и на функциональном уровне, содержит схему формирования выбранных тестовых входных сигналов. Входные сигналы здесь должны быть выбраны такой формы, чтобы за один имитационный эксперимент можно было бы убедиться в правильности функционирования макромодели во всех возможных режимах.
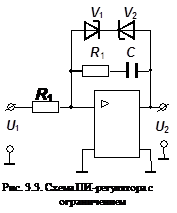
В качестве примера рассмотрим процесс формирования макромодели аналогового ПИ-регулятора с ограничением выходного напряжения. Упрощенная функциональная схема регулятора приведена на рис. 3.3.
Выходное напряжение U 2 ограничивается значениями напряжений ± U V пробоя стабилитронов V 1, V 2. При достижении напряжения U 2 значений ± U V операционный усилитель регулятора закорачиватся, а кондесатор цепи обратной связи заряжается до напряжения ± U V.
 Алгоритм функционирования ПИ-регулятора можно записать следующим образом.
Алгоритм функционирования ПИ-регулятора можно записать следующим образом.
Если  , то
, то  , иначе,
, иначе,
когда  , то
, то  .
.
Здесь 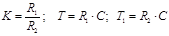 .
.
Структурная реализация алгоритма осуществляется с помощью модели переменной структуры, в которой при достижении выходного напряжения пороговых значений отключается вход интегратора и замыкается цепь дозаряда конденсатора в обратной связи. Внутренняя схема функционального блока, «ПИ-регулятор с ограничением», приведена рис. 3.4.
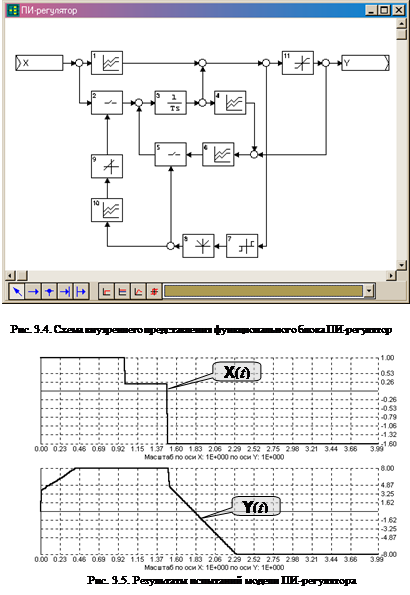
В целях верификации построенной модели выберем следующие значения параметров: К = 4, Т = 0,1 с, ± U = ±8 В, а тестовый входной сигнал X (t) сформируем с помощью элементов задания внешних воздействий в виде, приведенном на первом графике рис. 3.5. Результаты имитационного эксперимента, представленные на втором графике рис. 3.5 в виде кривой изменения выходного сигнала Y (t), подтверждают возможность воспроизведения реальных динамических процессов в аналоговом ПИ-регуляторе с помощью модели переменной структуры.
 |








