 2015-05-26
2015-05-26 5989
5989Результаты интегрирования сравниваются в решающем устройстве РУ
и на выходе РУ формируются первичные сигналы u1 и u2 ависимости от знака неравенства. Схемы оптимальных приемников сигналов с АМн и ФМн одноканальные (рис. 15.1,а,в) и езультат интегрирования сравнивается с порогом. этих схемах генераторы G1и. G2вырабатывающие точные опии передаваемых сигналов sl (t) и s2(t), синхронизируются т специального устройства. Для работы интегратора и решающего устройства также используются синхронизирующие тактовые импульсы, определяющие начало и конец интервала интегрирования и момент вынесения решения о принятом сигнале. риведенные на рис. 15.1 схемы получили название оптимальных корреляционных приемников, поскольку математическая операция перемножения двух сигналов и интегрирования произведения означает корреляцию между ними (см. (2.21)). Такой же
операцией (см. (13.7)) определяется сигнал на выходе согласованного фильтра, поэтому оптимальные приемники можно выполнить и на согласованных фильтрах (рис. 15.2), которые заменяют енераторы сигналов si(t), перемножители, интеграторы,
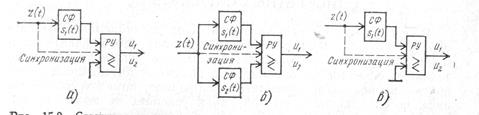
Рис .15.2 Структурные схемы оптимальных когерентных демодуляторов на согласованных фильтрах: а- АМи; б- ЧМи; в-ФМи сигналов
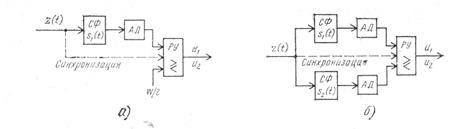
Рис. 15.3 Структурные схемы оптимальных некогерентных дамодуляторов:
А- АМи; б- ЧМи;
Некогерентный прием. Все приведенные схемы оптимальных приемников можно рассматривать как схемы оптимальных когерентных демодуляторов дискретных сигналов. На их вход поступают дискретные сигналы s; (t) в смеси с помехами, на выходе формируются первичные сигналы и;, для чего используются сведения не только об амплитуде, но и фазе высокочастотных манипулированных сигналов.
Достаточно часто сведения о фазе принимаемого сигнала не используются. Такой способ приема называют некогерентным (см. § 13.1) и применяется он в каналах с переменными параметрами (фаза меняется случайно) или при технических трудностях определения фазы с целью упрощения схемы.
При некогерентном приеме решение в РУ о передаваемом сигнале принимается не по мгновенным значениям напряжений на выходе цепей обработки, а по значениям гибающей. Для выделения огибающей в схему приемников после цепей обработки, например согласованных фильтров, включаются амплитудные детекторы. В результате этого схемы оптимальных некогерентных приемников принимают вид, показанный на рис. Ц.З. Следует отметить, что некогерентный прием нельзя осуществить для сигналов с ФМн, так как здесь передаваемая информация заложена в изменении фазы, а фаза-то и и не учитывается при некогерентном приеме.
15.3. ПОТЕНЦИАЛЬНАЯ ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ
Расчетные соотношения. Под потенциальной помехоустойчивостью приема дискретных сигналов (сообщений) понимают минимальную возможную вероятность ошибки при приеме заданных сигналов на оптимальный приемник Котельникова. При приеме на реальный приемник, как правило, помехоустойчивость ниже потенциальной и ни при каких условиях не может превышать последнюю.
Расчетные формулы вероятности ошибки при оптимальном приеме равновероятных сигналов с АМн, ЧМн, ФМн и ОФМн в
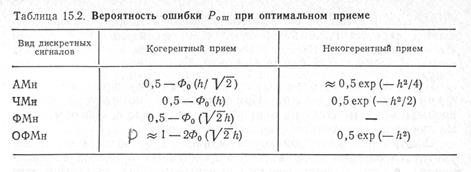
канале с белым аддитивным гауссовским шумом, полученные в еории потенциальной помехоустойчивости, приведены в табл. 15.2со следующими обозначениями: h2 =Ws/No— отношение энергиисигнала Ws к спектральной плотности мощности шума No,
Фо(z) — табулированный интеграл вероятности, описание и формула которого (2.25) даны в ф 2.6. Из формул табл. 15.2 следует,что вероятность ошибки при оптимальном приеме зависит от видадискретных сигналов, их энергии, способа приема, спектральной
плотности мощности шума.Трудности использования формул табл. 15.2 состоят в необходимости иметь таблицу интеграла вероятности Фо(z) или программу численного интегрирования на ЭВМ. Используя аппроксимацию (2.25), получим формулу вероятности ошибки при когерентном приеме для АМн, ЧМн и ФМн сигналов в более удобном для практических расчетов с точностью 1...2% виде:
Рош=0,65 ехр[ — 0,44(уh+0,75)2], (15.5)
где у=1/21/2 — для АМн., у=1 — для ЧМн,.у=1/2 1/2 — для ФМн.
Формулами табл. 15.2 для вероятности ошибки пользуются при решении основных задач анализа и синтеза оптимального приемника: расчета помехоустойчивости приема при заданных сигналах и помехах и, наоборот, по заданной помехоустойчивости
определения требуемых характеристик сигналов и помех.
Пример 15.1. Вычислить вероятность ошибки при оптимальном когерентном
приеме двоичных ЧМн сигналов, если Ws/Nо=9. Как изменится вероятность
ошибки при увеличении скорости модуляции В в 2 раза?
Подставив (155) в h=(Ws/No)1/2 =3 и учмн =1, получим Рош
=0,65exp[ — 0,44(3+0,75)2] =1,28 10-3. При увеличении скорости модуляции В
длительность сигнала и, соответственно, энергия уменьшается в 2 раза, и тогда
h21 =4,5. Подставляя в (15.5) новое значение h=(4,5)1/2, получим Рош
=1,68 *10-2. Сравнение Рош и Рош1 показывает, что увеличение скорости модуляции в 2 раза привело к увеличению вероятности ошибки в 1,68 10 -2/(1,28*
I0-3) =13 раз.
Пример 15.2. Определить мощность сигнала Рs. на входе оптимального некогерентного приемника двоичных АМн ' сигналов, необходимую для обеспечения вероятности ошибки Рош <=10-5, если скорость модуляции В=1200 Бод
No=10-5 2/Гц.
Из табл. 15.2 следует, что вероятность ошибки в условиях примера определяется формулой Рош  0,5 ехр (-h2/4). Прологарифмировав Рош. получим h2 — 4ln(2Рош) =43,28. Поскольку h2=Еs/No и Еs=Рs/В, требуемая мощность сигнала Рs≥h2BNo=43,28.1200.10-5=0,52 В2.
0,5 ехр (-h2/4). Прологарифмировав Рош. получим h2 — 4ln(2Рош) =43,28. Поскольку h2=Еs/No и Еs=Рs/В, требуемая мощность сигнала Рs≥h2BNo=43,28.1200.10-5=0,52 В2.
Сравнение помехоустойчивости приема диск р е т н ы х с и г н а л о в. При сравнении помехоустойчивости необходимо дать ответ на вопрос: «Какие сигналы, способы приема лучше по помехоустойчивости и на сколько?».
Обычно сравнение помехоустойчивости производится не по вероятности ошибки из-за весьма значительных пределов ее изменения, а по энергетическому выигрышу. Под энергетическим выигрышем gэ дБ, понимают различие в энергиях сигналов, обеспечивающих одинаковое значение вероятности ошибки при различных видах манипуляции, способах приема, кодирования, т. е. gэ=101g Ws1/Ws2 при Рош N=const (15.9)
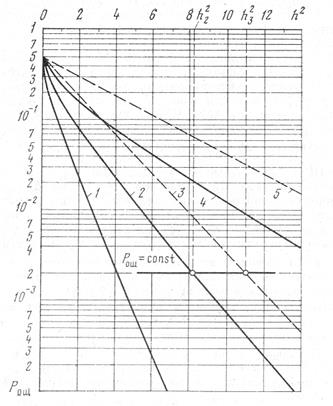
Рис. 15.4. Вероятность ошибки при оптимальном приеме двоичных равновероятных сигналов в канале с аддитивным гауссовским шумом:
I — противоположные ФМн сигналы, когерентный прием; 2 — ортогональные ЧМн сигналы, когерентный прием; 3 — ортогональные ЧМн сигналы, некогерентный прием; 4 — АМвсигналы, когереитиый прием; 5 — АМн сигналы, некогереитный прием
Если gэ<0говорят об энергетических потерях. Обычно значения энергий для расчета g, получают не из формул вероятности ошибок, а по графическим зависимостям Рош=fh2 дающим более наглядное представление о помехоустойчивости.В качестве примера на рис. 15.4 приведены зависимости Рош=fh2 для оптимального приема двоичных сигналов, построенные по формулам табл. 15.2. Вероятность ошибки на графиках для удобства отложена в логарнфмнческом масштабе. Из рис.15.4 четко видно, что наибольшую помехоустойчивость имеет система с ФМн сигналами, наименьшую — с АМн. Проведя вычисления gэпо (15.6), получим, что система с противоположными ФМн сигналами дает энергетический выигрыш на 3 дБ (или в 2 раза) по сравнению с ортогональными ЧМн сигналами и на 6 дБ (или в 4 раза) — с АМн сигналами. Физически это объясняется тем, что ФМн сигналы максимально отличаются друг от друга.Порядок пользования графиками Рош=fh2 для вычисления энергетического выигрыша иллюстрируется примером 15.3.
Пример 15.3. Определить энергетический выигрыш оптимального когерентного приема двоичных ЧМн сигналов по сравнению с оптимальным некогерентным приемом этих же сигналов.Вычисление проведем по рис. 15.4 при Рош =2 10-3 Из точек пересечения
прямой Рош =2.10-3зависимостей 2 (когерентный прием) и 3 (некогерентный
прием) следует, что для обеспечения Рош =2.10-3при когерентном приеме необходимо h2=8,4, а при некогерентном — h3= 11,0. Так какWs=h2No то,подставляя в (15.6) значения h' получим gэ=101g11,0/8,4=1,17 дБ.Из рис. 15.4 и примера 15.3 следует, что энергетические потери некогерентного приема незначительны (1... 2 дБ), поэтому при
практической реализации приемников АМн и ЧМн сигналов предпочтение отдается некогерентному приему.
15.4. ОПТИМАЛЬНЫЙ ПРИЕМ
НЕПРЕРЫВНЫХ СИГНАЛОВ
К р и т е р и и о п т и м а л ь н о с т и. Задача приема непрерывных модулированных сигналов существенно отличается от задачи приема дискретных сигналов (см. ф 13.1). Здесь в результате обработки сигналов в приемнике необходимо не только подавить помеху, но и восстановить передаваемый первичный сигнал и(l).Искажения его формы должны быть минимальны.Таким образом, исходя из количественной меры помехоустойчивости передачи непрерывных сигналов (15.2), в качестве критерия оптимальности выбирают минимум среднеквадратического отклонения между переданным u(t) и принятым и(t)первичными сигналами:
min е2(t) =min[uпр(t) — u(t) ]2. (15.7)
Этот критерий также предложен В. А. Котельниковым и является наиболее общим. Он учитывает не только помехи, но и искажения принимаемых сигналов.
А л г о р и т м о п т и м а л ь н о г о п р и е м а. Правило (алгоритм) работы оптимального приемника, обеспечивающее выполнение критерия (15.7), можно получить из рассмотрения процессов преобразования первичных сигналов при их передаче в системе связи (см. § 1.1).
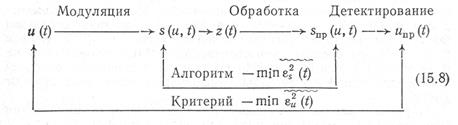
Согласно критерию оптимальности (15.7) требуется обеспечить минимальное отличие (в среднем) между принятыми и переданными первичными сигналами. Если считать, что операции модуляция и детектирование идеальны и не вносят искажений, то из (15.8) следует, что minE2u(t) обеспечивается при минимальном (в среднем) отличии между принятыми sпр(u,t) и пере- данными s(u, t) модулированными сигналами. Тогда алгоритмом работы оптимального приемника непрерывных сигналов можно считать
minE2s(t)=min'[sпр(u t) — s(u, t)]2. (15.9)
Таким образом, оптимальный приемник непрерывных сигналов
согласно (15.9) должен обеспечивать минимум среднеквадратического отклонения принятого модулированного сигнала от переданного. При идеальном детекторе такой приемник будет воспроизводить первичный сигнал u(t) с минимальным отличием от переданного. Структурная схем а оптимального приемника. Обеспечить обработку принятого сигнала z(t) =s(u, t)+n(t) так, чтобы получить min  2s(t)можно с помощью оптимального линейного фильтра Колмогорова — Винера (см. § 13.2). Этот фильтр как раз и дает наилучшее подавление помех при минимальных искажениях формы сигнала. Однако линейный фильтр по алгоритму (15.9) является оптимальным для модулированного сигнала s(u, t), а не для первичного u(t). Он осуществляет оптимальную додетекторную обработку. Следовательно, после оптимального
2s(t)можно с помощью оптимального линейного фильтра Колмогорова — Винера (см. § 13.2). Этот фильтр как раз и дает наилучшее подавление помех при минимальных искажениях формы сигнала. Однако линейный фильтр по алгоритму (15.9) является оптимальным для модулированного сигнала s(u, t), а не для первичного u(t). Он осуществляет оптимальную додетекторную обработку. Следовательно, после оптимального
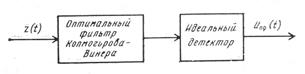
Рис.15.5 Структурная схема оптимального приемника непрерывных сигналов
фильтра должен быть еще включен идеальный детектор для заданной модуляции.
Исходя из вышесказанного, общая структурная схема оптимального приемника непрерывных сигналов будет иметь вид, показанный на рис. 15.5. Она эквивалентна схеме фильтрационной обработки непрерывных сигналов (см. рис. 13.1). Отличие состоит только в том, что для получения наилучшей обработки необходимы оптимальный фильтр и идеальный детектор.
15.5. ПОТЕНЦИАЛЬНАЯ ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА НЕПРЕРЫВНЫХ СИГНАЛОВ
0 п р е д е л е н и я. Минимально возможное значение средне- квадратической ошибкиmin 2s(t)при заданных условиях пере дачи (заданных сигналах, помехах, модели канала связи) определяет потенциальную помехоустойчивость приема непрерывных сигналов. Она дает предельно возможную точность восстановле ния первичного сигнала u(t). Поскольку физически 2ut) (см. § 15.1) означает мощность помехи, расчет потенциальной помехоустойчивости сводится к вычислению минимально возможной мощности помехи на демодуляторе.
Однако абсолютное значение мощности помехи не может быть объективной характеристикой ее влияния на сигнал, так как надо учитывать еще и уровень сигнала. Обычно для определения помехоустойчивости приема непрерывных сигналов вычисляется отношение средних мощностей сигнала Рс.вых и помехи Рп.вых на выходе демодулятора: рвых = Рс.вых/Рп.вых
Выигрыш демодулятора. В любом демодуляторе отношение сигнал-помеха на выходе рвых зависит не только от качественных показателей демодулятора, но и от отношения сигнал-помеха на его входе рвх Объективная закономерность: чем меньше помех на входе, тем меньше их и на выходе, поэтому в общем случае помехоустойчивость систем передачи непрерывных сигналов более удобно оценивать выигрышем в отношении сигнал-помеха:
Gс-п= рвых/ рвх= (Рс.вых/Рп.вых)/(Рsвх/Рnвх)
причем средние мощности помехи на входе Рnи выходе Рп.вых демодулятора определяются в полосе частот соответствующих сигналов. l
Выигрыш gс-п показывает изменение отношения сигнал-помеха демодулятором. При gс-п>1 демодулятор улучшает отношение сигнал-помеха, при gс-п<1 получаем, по существу, не «выигрыш»„ а «проигрыш».
Расчетные формулы выигрыша оптимального демодулятора для различных видов модуляции при помехе в виде аддитивного белого гауссовского шума приведены в табл.15.3 со следующими
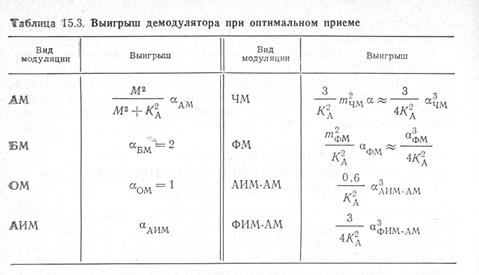
обозначениями: а=Δfs/Fm — коэффициент расширения полосы,показывающий, во CKOJIbKO раз ширина спектра модулированного сигнала, Δfs, превышает максимальную частоту модулирующего сигнала 'Fm М — коэффициент модуляции; m — индекс модулядции; KA — коэффициент амплитуды модулирующего сигнала.Анализ формул табл. 15.3 показывает, что для АМ максимальный выигрыш gс-пAм =2/3 достигается при М=1 и КО=2. Практически всегда М<1, а К2A>2 поэтому gс-пAм<2/3, т. е. система.АМ дает не «выигрыш>, а «проигрыш». Так, для первичного сигнала звукового вещания при К=18 дБ и М=0,6 имеем gс-пAм=0,011. Физически малый выигрыш для АМ объясняется тем, что большая часть мощности модулированного сигнала сосредоточена в несущей, а полезная информация, создающая сигнал на выходе детектора, содержится в маломощных боковых колебаниях,ипоэтому устранение несущей в АМ сигнале (переход к БМ и ЮМ) подымает выигрыш до значения gс-п =а.В широкополосных видах модуляции (ЧМ, ФМ, ФИМ и др.)выигрыш может быть намного больше единицы и резко возрастает.при расширении спектра модулированного сигнала (кубическая зависимость от коэффициента расширения полосы а). В связи с этим для увеличения выигрыша следует повышать девиацию частоты угловых модуляций или уменьшать длительность импульса несущей импульсных модуляций.Формулы выигрыша являются исходными как для определения качества приема непрерывных сигналов, так и для сравнения различных систем передачи по помехоустойчивости.
Пример 15.4. Определить отношение сигнал-помеха на выходе демодулятора ЧМ сигналов, если отношение сигнал-помеха на его входе рвх =30 дБ.
Параметры модуляции: индекс mчм = 10; коэффициент амплитуды КА= 14 дБ.
Прием оптимальный.
Подставив в формулу выигрыша ЧМ параметры модуляции mчм=10 и
К2А==101.4=25,1, получим значение выигрыша демодулятора gс-пЧм =3.10-2*
Х2(20+1)/25,1=263. Из (15.10) следует, что,рвых= gс-пЧм рвх = 54,2 дБ.
Пример 15.5. Определить, на сколько выше помехоустойчивость приема
ЧМ сигналов по сравнению с помехоустойчивостью приема АМ сигналов прю
одинаковых условиях приема: равенство мощностей модулированных сигналов
и спектральной плотности мощности помех на входах приемников. Прием оптимальный.
С учетом формул (15.10) и (2.39) отношение сигнал-помеха на выходе,демодулятора
рвых= gс-п рвх= gс-пЧРвх /NoΔfs (15.11)
Подставив в (15.11) значения выигрышей. демодулятора ЧМ и демодулятора
АМ и вычислив отношение, получим
рвых ЧМ / рвых AМ=3((М2+К2А)/МК2А))m2чм.
Следовательно, при одних и тех же условиях отношение сигнал-помеха в системе с ЧМ не менее чем в 4,5m2 раз больше, чем в системе с АМ. Нз практике в системах с ЧМ применяют, как правило, индекс модуляции mчм >=5, и тогда преимущество ЧМ по сравнению с AN весьма значительное. Однако следует подчеркнуть, что зто преимущество получается за счет расширения полосы занимаемых частот, т. е. осуществляется обмен отношения сигнал-помеха на полосу частот.Значительный выигрыш при широкополосных модуляциях объясняется в основном когерентным сложением в демодуляторе спектральных составляющих сигнала при некогерентном сложении составляющих помех. Так, при когерентном сложении 12 одинаковых составляющих сигнала и помехи амплитуда сигнала увеличится в 12 раз, мощность соответственно в 144 раза, мощность помех при этом возрастает только в 12 раз.
Порог помехоустойчивости демодулятора. Из формулы табл. 15.4 следует, что в широкополосных модуляциях при больших значениях коэффициента расширения спектра а достигаются огромные значения выигрыша демодулятора. Так, дляЧМ при mчм = 60 и К2А =2 получаем выигрыш gс-п=6,6.1О5. Казалось бы, задача обеспечения высокого качества передачи непрерывных сигналов решается достаточно просто: увеличивая ширину спектра модулированного сигнала (для ЧМ, например, это достигается увеличением индекса модуляции), можно получить необходимый выигрыш и требуемое отношение сигнал-помеха на выходе демодулятора. Но, увы(С расширением спектра растет /мощность помехи на входе демодулятора и соответственно снижается отношение сигнал-помеха рвх. При некотором пороговом значени и р вх.пор резко увеличивается уровень помех на выходе демодулятора, вызывая тем самым почти скачкообразное уменьшение отношения сигнал-помеха рвх.
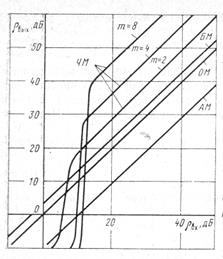
Рис. 15.6 Кривые помехоустойчивости оптимальных демодуляторов ЧМ(mчм=2,4,8) БМ, ОМ и АМ
Выигрыш. демодулятора значительно падает. Описанное явление иллюстрируется зависимостями рвых=f(вх) (рис. 15.6)
Таким образом, порогом помехоустойчивости демодулятора является минимальное отношение сигнал-помеха на его входе, ниже которого система связи с заданной модуляцией теряет преимущества по помехоустойчивости (высокий выигрыш). Именно пороговый эффект ограничивает возможности широкополосных модуляций в повышении качества передачи непрерывных сигналов.
Появление порога для систем связи, в которых ширина спектра модулированного сигнала Δ fs превышает ширину спектра модулирующего сигнала Fm можно объяснить эффектом подавления сильным сигналом слабого в детекторе (см. гл. 14). В надпороговой области сигнал превышает помеху и в детекторе подавляется более слабая помеха. В подпороговой области помеха превышает сигнал и подавляется уже слабый сигнал более сильной помехой. Возникают “аномальные” выбросы помехи на выходе, резко снижающие качество. Пороговые явления начинают наблюдаться при равенстве пиковых значений сигнала и помехи. Поскольку коэффициент амплитуды помехи КA=3, порог помехоустойчивости рвх.пор=10 дБ (см. рис. 15.6). При синхронном детектировании AN, БМ, ОМ сигналов пороговый эффект не наблюдается. На рис. 15.6 этим модуляциям соответствуют линейные зависимости при любых значениях рвх.
Методы снижения порога помехоустойчивости. В настоящее время разработаны и внедрены в основном методы снижения порога помехоустойчивости для системы связи с ЧМ ввиду широкого ее распространения. Поскольку порог наступает при определенной мощности помехи на входе демодулятора, естественно, уменьшение мощности помехи при неизменной мощности сигнала обеспечит работу демодулятора выше порога.
Как известно, мощность флуктуационной помехи, обычно действующей в канале связи, пропорциональна ширине полосы час- тот (см. пример 2.7). Следовательно, для уменьшения Рnвых демодулятора необходимо уменьшать полосу пропускания фильтра додетекторной обработки Пs,. В оптимальном демодуляторе с линейными фильтрами Пs=Δfs, (Δfs -ширина спектра модулированного сигнала). Если взять более узкополосный фильтр с П's< Δfs
то мощность помехи на выходе фильтра уменьшится, но и сигнал через такой фильтр будет проходить со значительными частотными искажениями. Качество приема резко ухудшится. Для устранения этого противоречия проф. А. С. Синицкий в 1940 г. предложил оригинальное решение. Используя то обстоятельство, что при ЧМ мгновенная частота меняется сравнительно медленно по закону модулирующего сигнала, узкополосный фильтр выполняется перестраиваемым так, чтобы следить за мгновенной частотой ЧМ сигнала. Фильтр был назван следящим. Схема его включения в тракт промежуточной частоты ЧМ приемника показана на рис. 15.7,а. Для перестройки средней частоты фильтра используются реактивные управляемые элементы (варикапы, реактивные транзисторы и др.). Управляющее напряжение. на них подается с выхода демодулятора. Полоса пропускания следящего фильтра устанавливается примерно равной П's=2Fm где F максимальная частота спектра модулирующего сигнала. Мощность помех на выходе следящего фильтра снижается примерно в тчм раз,что ведет к понижению порога на5... 7 дБ.
Технические трудности выполнения перестраиваемого с частотой Fm фильтра привели к некоторому изменению схемы (рис. 15.7,б). Узкополосный фильтр промежуточной частоты с полосой П's=2Fm, не перестраивается. Обратная связь в схеме подается на гетеродин и подбирается так, чтобы синхронно с изменением частоты принимаемого сигнала fo+ Δfд в том же направлении из- менялась частота гетеродина G с девиацией Δfдг Такая схема снижения порога получила название — следящий гетеродин. Частота на выходе смесителя в этой схеме при fг,— fо=fпч
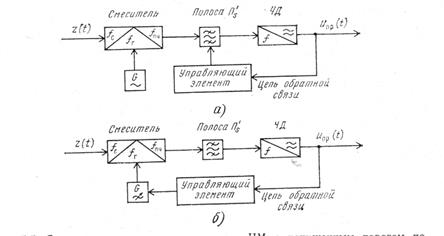
Рис.15.7 Структурные схемы демодуляторов ЧМ с пониженным порогом помехоустойчивости: а- со следящим фильтром; б- с обратной связью по частоте
Из (15.12) видно, что выбором девиации частоты гетеродина Δfдг можно уменьшить ширину спектра сигнала и, соответственно, снизить порог помехоустойчивости.
15.6. НЕОПТИМАЛЬНЫЙ ПРИЕМ СИГНАЛОВ
У с л о в и я п р и м е н е н и я. Реализация оптимальных схем приема как дискретных, так и непрерывных сигналов требует (см. § 15.2 и 15.4) некоторой априорной информации о сигналах и свойствах канала. Чем больше априорной информации имеется в точке приема, тем совершенней и сложней будет приемное устройство и выше его помехоустойчивость. Для сигналов с известными параметрами можно реализовать оптимальный когерентный приемник В. А. Котельникова.
Однако на практике во многих случаях применяют более простые и надежные неоптимальные варианты приемного устройства ценой некоторой потери помехоустойчивости. Для простых сигналов и наиболее часто применяемых видов дискретной и аналоговой модуляцией (АМ, ЧМ, ФМ) схемы неоптимального приема по помехоустойчивости незначительно отличаются от потенциальной. Рассмотрим некоторые из этих схем.
Прием сигналов с частотной манипляцией.
С середины 40-х годов и до настоящего времени частотная манипуляция (ЧМн) является основной в системах передачи дискретных сообщений. Как правило, применяется фильтровый способ приема ЧМн, структурная схема демодулятора которого аналогична структурной схеме оптимального иекогерентного демодулятора ЧМн сигналов (см. рис. 15.3). Отличие только в том, что в оптимальном демодуляторе применяются согласованные фильтры, в неоптимальном — полосовые фильтры до детектора и манипуляционный ФНЧ после детектора.
Вероятность ошибки в неоптимальном фильтровом демодуляторе ЧМн сигналов больше, чем при некогерентном оптимальном приеме. Энергетические потери составляют 3...6 дБ. Это ухудшение помехоустойчивости вызывается двумя основными факторами:
уменьшением отношения сигнал-помеха по сравнению с согласованными фильтрами;
межсимвольными помехами, создаваемыми переходными процессами в фильтрах (остаточными колебаниями, возникающими в результате воздействия предыдущих элементов сигнала).
Системы с фазовой и относительной фазовой манипуляциями. Как указано в ф 15.3, фазовая манипуляция (ФМн) с противоположными сигналами обладает наибольшей потенциальной помехоустойчивостью и поэтому широко внедряется в новых системах связи. При ФМн необходимо получать информацию о фазе принимаемого сигнала, поэтому здесь обязательно используется когерентный прием, т. е. фазовое детектирование. Схема демодулятора ФМн сигналов будет иметь вид, показанный на рис. 15.8. Если сравнить эту схему со схемой оптимального приемника (см. рис. 15.1), то заметно их сходство. Фазовый детектор ФД выполняет роль перемножителя, фильтр нижних частот ФНЧ — интегратора. Опорный генератор G системой фазовой автоподстройки частоты ФАПЧ подстраивается так, чтобы частота и фаза его колебаний полностью совпадала с частотой и фазой одного из сигналов, например s1(t). В зависимости от полярности напряжения на выходе ФНЧ в решающем устройстве РУ формируются выходные сигналы u1 или u2. Включение в схему полосового фильтра ПФ додетекторной обработки (напомним, что в оптимальном приемнике он не требуется) необходимо для ограничения мощности помех на входе ФД.
Приведенная схема приемника ФМн обеспечивает помехоустойчивость, незначительно хуже потенциальной, но обладает существенным недостатком. Для нормальной работы демодулятора ФМн фаза колебаний генератора должна с высокой точностью совпадать с фазой одного из сигналов. Этого можно достичь только передачей специальных сигналов фазовой синхронизации. Но на такой сигнал требуются затраты мощности и ФМн теряет, свои преимущества. (Использование для целей фазовой синхронизации принимаемого сигнала z(t) приводит к так называемой: «обратной» работе (выходной сигнал u1 заменяется на u2 и наоборот). Обратная работа в демодуляторе ФМн возникает тогда, когда фаза генератора 6 меняется на противоположную Почему же это происходит? При равновероятных сигналах s1(t)и s2(t),отличающихся по фазе на Π, на приеме нет абсолютно никаких признаков, по которым можно установить, фаза какого сигнала принята в качестве опорной. Поэтому при любых схемах ФАПЧ синхронизация генератора Gпроисходит по одному из сигналов и его фаза имеет два устойчивых состояния: 0 или П.В результате воздействия помех в канале фаза синхронизируемого генератора переходит скачком из одного состояния в другое случайным образом, вызывая обратную работу.
Этот существенный недостаток ФМн, ограничивающий ее применение, устранен в системах с относительной фазовой манипуляцией (ОФМн), предложенной в 1953 г. проф. Н. Т. Петровичем. Напомним, что в системах с ОФМн информация передается не абсолютным, а относительным значением фазы, которое вычисляется как разность фаз между переданным в данный момент
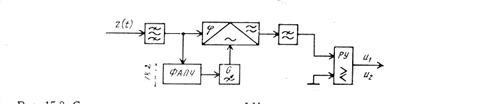
Рис.15.8 Структурная схема приемника ФМи сигналов
и предыдущим сигналом. Формирование ОФМн сигналов описано
в § 3.7. Из множества различных методов приема ОФМн сигналов наибольшее распространение получили методы сравнения фаз, обеспечивающие некогерентный прием, и сравнения полярностей — когерентный прием. Структурная схема демодулятора ОФМн сигналов по методу сравнения фаз представлена на рис. 15.9,а. Отличие этой схемы от схемы приемника ФМн (рис. 15.7) состоит в том, что система ФАПЧ и генератор G, дающие эффект обратной работы, заменены на линию задержки ЛЗ, рассчитанную на время tзад=ts
В фазовом детекторе производится сравнение фаз принятого сигнала si(f) и предыдущего si(t —ts). Формирование выходных сигналов и; после ФД осуществляется так же, как и в схеме приема ФМн. Так как в этой схеме в качестве опорного напряжения для ФД используется принятый сигнал, то появление обратной работы принципиально исключается. Демодулятор ОФМн сигналов по методу сравнения полярностей функционально состоит из двух частей: когерентного демодулятора ФМн сигналов и относительного декодера, или схемы сравнения полярностей (рис. 15.9,6). Принимаемый сигнал сначала обрабатывается когерентным демодулятором ФМн и, конечно, на его выходе наблюдается обратная работа. Однако относительный декодер (линия задержки ЛЗ и сравнивающее устройство СУ), подключенный к выходу РУ, устраняет ее. Это происходит потому, что в СУ сравниваются полярности настоящей и предыдущей посылок и вырабатывается выходной сигнал по правилу: если полярности совпадают — положительное напряжение, если полярности соседних посылок разные — отрицательное. Обратная работа изменяет полярность как настоящей, так и предыдущей посылок и поэтому не сказывается на полярности сигнала
на выходе СУ.
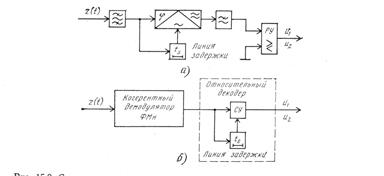
Рис. 15.9. Структурные схемы приемника ОФМн сигналов:

