 2015-05-26
2015-05-26 1908
1908дискретизации Тд. Правило формирования ДМ сигнала показано на рис. 16.7. На участке t1...t2 и t3...t4 аналоговый сигнал u(t) возрастает (производная положительная), поэтому кодовые символы ДМ сигнала принимают значения +1 и на рис. 16.7,6 изображены как импульсы положительной полярности. На участке t2... t3 сигнал u(t) убывает (производная отрицательная), кодовые символы ДМ сигнала принимают значения — 1 и изображены в виде импульсов отрицательной полярности. Формирование из ДМ сигнала аналогового сигнала также относительно простое. Поскольку ДМ сигнал получается как знак производной аналогового сигнала, для преобразования последовательности импульсов в аналоговый сигнал необходимо выполнить операцию, обратную дифференцированию — интегрирование.
В схеме ЦАП ДМ сигналов (рис. 16.8) используется идеальный интегратор, имеющий импульсный отклик в виде ступеньки напряжения. Если на вход идеального интегратора подать последовательность импульсов ДМ сигнала, то отклики на каждый из них суммируются и выходное напряжение будет иметь вид ступенчатой функции времени с постоянным шагом Л (рис. 16.7,8). Эта ступенчатая функция и является аппроксимацией аналогового сигнала.
Она образовалась в результате дискретизации и квантования, поэтому обозначается как uкв(kТд). Восстановление аналогового сигнала uпр (t) из квантованного uкв(kТд). как и в ЦАП ИКМ, осуществляется ФНЧ.
В аналого-цифровом преобразователе ДМ, схема которого показана на рис. 16.8 и временные диаграммы работы на рис. 16.9 своеобразно решается задача получения производной аналогового сигнала u(t). Напомним, что производная вычисляется как отношение приращения функции к приращению аргумента. Для получения приращения аналогового сигнала используется вычитающее устройство, на один вход которого подается непрерывный сигнал u(t), на второй — восстановленный интегратором из выходного ДМ сигнала квантованный сигнал uкв(kТд). Разностный сигнал e(t) =u(t) — uкв(kТд). и является аппроксимированной производной сигнала u(t). Функцию квантователя выполняет пороговое устройство (ПУ), напряжение на выходе которого соответствует
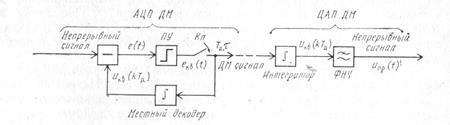
Рис. 16.8. Структурная схема АЦП и ЦАП линейной дельта- модуляции
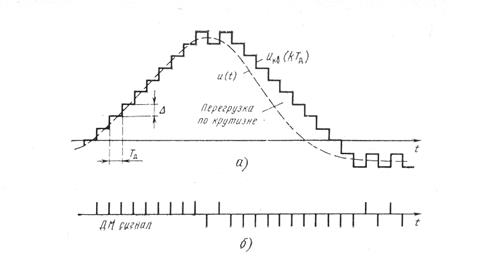
Рис. 16.9. Временные диаграммы сигналов в линейной ДМ в режиме слежения за исходным сигналом:
и — сигналы на входах вычитающего устройства; б — сигнал линейной ДМ
знаку разностного сигнала е(/). Электронный ключ Кл, который замыкается на короткое время т через интервал дискретизации Тд, является одновременно дискретизатором и кодером. На выходе его формируется двуполярная последовательность им- пульсов ДМ сигнала (рис. 16.9,6).
Такое техническое решение построения АЦП позволило, во- первых, получить более точную ступенчатую аппроксимацию, непрерывного сигнала на участках с малыми приращениями, во вторых, устранило неопределенность (как изображать ДМ сигнал при отсутствии приращения) при преобразовании постоянного напряжения в ДМ сигнал за счет чередующихся импульсов положительной +1 и отрицательной — 1 полярностей.
Рассмотренный выше способ получения ДМ сигнала является наиболее простой, так называемой линейной (классической) ДМ, предложенной в 1946 — 1948 гг. Делорейном, Ван Миеро, Дерьявичем (Франция) и Л. А. Коробковым (СССР). В настоящее время существуют десятки разновидностей ДМ, отличающихся, в основном, предсказателем (местным декодером). Поскольку в ДМ разностный сигнал формируется из входного и предсказанного тем или иным способом, ее часто называют системой с предсказанием.
0 с о б е н н о с т и Д М. Восстановленный непрерывный сигнал 'при ДМ, конечно, лишь с некоторым приближением воспроизводит исходный сигнал. Точность воспроизведения зависит от частоты дискретизации, шага квантования, а также от крутизны сигнала. Совершенно очевидно, что для уменьшения шума квантования, как и в ИКМ, необходимо уменьшить шаг квантования 6. Но уменьшение шага ступенчатой кривой (см. рис. 16.9,а) требует такого же увеличения частоты дискретизации, иначе ступенчатая кривая не будет совпадать с непрерывной. В ДМ частота дискретизации fд определяется не по теореме Котельникова, а исходя из заданной точности воспроизведения непрерывного сигнала.
Расчеты показывают, что при одинаковом с ИКМ шуме квантования частота дискретизации для ДМ примерно на порядок выше (fддм=20Fm). Однако скорость модуляции В цифрового сиг-
нала в ИКМ и ДМ примерно одинакова, так как при ДМ используется одноразрядный код, а в ИКМ — n-разрядный.
Уменьшение шага квантования в ДМ приводит к специфическим искажениям, так называемой перегрузке по крутизне. Перегрузка возникает из-за того, что восстановленный ступенчатый сигнал после интегратора за один такт Т~ увеличивается (уменьшается) только на один шаг Δ. А сигнал u(t) за это время может увеличиваться (уменьшиться) на несколько шагов Δ. Возникает дополнительная погрешность восстановления. Такой случай показан на рис. 16.9,а на падающем участке непрерывного сигнала. Одним из способов борьбы с перегрузкой по крутизне является применение переменного шага квантования (адаптивная ДМ): с увеличением крутизны увеличивается и шаг.
Шумы ложных импульсов в ДМ оказывают меньшее влияние, чем в ИКМ, поскольку код одноразрядный и ошибка приводит к изменению восстановленного сигнала на шаг Δ. Однако использование в схеме ДМ идеального интегратора, обладающего бесконечной памятью, приводит к накоплению ошибок. Для борьбы с этим явлением на практике либо периодически разряжают интегратор до нуля, либо используют интегратор, имеющий ограниченную постоянную времени.
Сравнение ИКМ и ДМ. На вопрос: «Какая из модуляций, ИКМ или ДМ, лучше?», — однозначного ответа дать нельзя. Все зависит от вида непрерывного сигнала, назначения системы связи, показателя, по которому производится сравнение. Можно
указать следующие основные особенности ИКМ и ДМ.
1. Классическая (линейная) ДМ по зависимости сигнал-шум
квантования от скорости цифрового сигнала уступает ИКМ. Однако разновидности ДМ (например, адаптивная с мгновенным компандированием и двойным интегратором в цепи обратной связи) обеспечивает одинаковое с ИКМ соотношение сигнал-шум при
меньшей тактовой частоте.
2. Дельта-модуляция более устойчива к помехам в линии, поэтому требования по помехоустойчивости при передаче ДМ сигнала на несколько порядков ниже, чем,. при ИКМ.
3. При ИКМ требуется синхронизация по тактам и по кодовым комбинациям, при ДМ — только по тактам.
4. Аппаратура формирования ДМ сигнала намного проще, чем
в ИКМ. Но в составе многоканальной системы связи, где оборудование ИКМ является групповым, а ДМ — индивидуальным,
суммарная сложность оборудования ДМ может оказаться и большей.
16.4. ОСОБЕННОСТИ ПЕРЕДАЧИ
ЦИФРОВЫХ СИГНАЛОВ ПО ЛИНИЯМ
СВЯЗИ
Двоичный цифровой сигнал на выходе АЦП ИКМ и ДИКМ
представляет собой последовательность однополярных импульсов
длительностью Т„соответствующих передаче 1 (двуполярные короткие импульсы ДМ для уменьшения ширины их спектра также преобразовываются в однополярные). Спектральная плотность мощности этой случайной последовательности импульсов теоретически бесконечна, но ее основная часть расположена в пределах от нуля до /д. Если сопоставить этот спектр с АЧХ реальных радио- и кабельных линий связи, то можно заметить их значительное несоответствие. Линии радиосвязи имеют примерно постоянную АЧХ в некоторой полосе, симметричной около несущей частоты. Кабельные линии (см. гл. 8, 9) с включенными в них
усилителями, регенераторами дают значительное ослабление в области низких и высоких частот. Поэтому во избежание искажений цифрового сигнала из-за несоответствия его спектра и АЧХ линии связи применяют дополнительное преобразование цифрового сигнала. В линиях радиосвязи (радиорелейных, спутниковых и др.) применяют те или иные виды вторичной частотной или фазовой манипуляции. При некогерентном приеме манипулированного сигнала предпочтительно использование ЧМН, при когерентном-ОФМн.
В кабельных линиях широко распространена передача сигналов двухуровневыми импульсами постоянного тока. Длительность импульсов уменьшается до половины интервала дискретизации и применяется специальное линейное кодирование. Полученный в
результате кодирования сигнал называют кодом линии. Простейшим из кодов линии является квазитроичный код с чередованием полярности импульсов (ЧПИ).
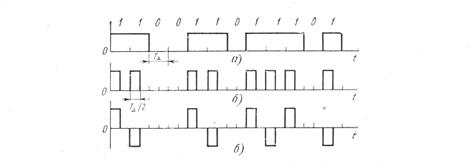
Рис. 16.10. Временное диаграммы
полярности импульсов (ЧПИ):

