 2015-05-26
2015-05-26 5395
5395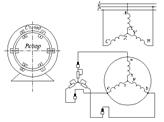
Неподвижная часть асинхронного двигателя – статор имеет трехфазную обмотку, при включении которой в сеть возникает вращающееся магнитное поле. Скорость вращения этого поля
n1=f1∙60/p.
В расточке статора расположена вращающаяся часть двигателя – ротор, который состоит из вала, сердечника и обмотки. Обмотка ротора состоит из стержней, уложенных в пазы сердечника и замкнутых с двух сторон кольцами.
Вращающееся поле статора пересекает проводники (стержни) обмотки ротора и наводит в них э. д. с. Но так как обмотка ротора замкнута, то в стержнях возникают токи. Взаимодействие этих токов с полем статора создает на проводниках обмотки ротора электромагнитные силы Fпр, направление которых определяется по правилу «левой руки». Силы Fпр стремятся повернуть ротор в направлении вращения магнитного поля статора. Совокупность сил Fпр, приложенных к отдельным проводникам, создает на роторе электромагнитный момент М, приводящий его во вращение со скоростью n2. Вращение ротора через вал передается исполнительному механизму.
Таким образом, электрическая энергия, поступающая в обмотку статора из сети, преобразуется в механическую.
Направление вращения магнитного поля статора, а следовательно, и направление вращения ротора, зависит от порядка следования фаз напряжения, подводимого к обмотке статора. При необходимости изменить направление вращения ротора асинхронного двигателя следует поменять местами любую пару проводов, соединяющих обмотку статора с сетью. Например, порядок следования фаз АВС заменить порядком СВА. Скорость вращения ротора n2 асинхронного двигателя всегда меньше скорости вращения поля n1, так как только в этом случае возможно наведение э.д.с. в обмотке ротора. Разность скоростей ротора и вращающегося поля статора характеризуется величиной, называемой скольжением,
s=(n1 - n2)/n1.
Часто скольжение выражается в процентах:
s=[(n1 - n2)/n1]∙100.
Скольжение асинхронного двигателя может изменяться в пределах от 0 до 1. При этом s≈0 соответствует режиму холостого хода, когда ротор двигателя не испытывает противодействующих моментов, а s≈1 соответствует режиму короткого замыкания, когда противодействующий момент двигателя превышает вращающий момент и поэтому ротор двигателя неподвижен (n2=0).
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Так, например, для двигателей нормального исполнения мощностью от 1 до 1000 кВт номинальное скольжение приблизительно составляет соответственно 0,06-0,01, т.е. 6-1%.
Скорость вращения ротора асинхронного двигателя равна
n2=(1-s)∙n1.
На щитке двигателя указывается номинальная скорость вращения nн. Эта величина дает возможность определить синхронную скорость вращения n1, номинальное скольжение sн, а также число полюсов обмотки статора 2р.
17.Регулирование частоты вращения трехфазного асинхронного двигателя
Частота вращения асинхронного двигателя определяется формулой
(4.62)
n 2 = n 1(1 - s) = 60 f 1 (1 - s)/ p,
из которой следуют три принципиально возможных метода регулирования асинхронных двигателей — изменение частоты f1 (частотное регулирование), числа полюсов 2р и скольжения s. Скольжение s обычно изменяют путем изменения потерь в цепи ротора с помощью реостата, но в некоторых случаях для этого изменяют величину питающего напряжения.
Частотное регулирование. Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты — электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах).
В настоящее время преобразователи частоты имеют довольно сложную схему и сравнительно высокую стоимость. Однако быстрое развитие силовой полупроводниковой техники позволяет надеяться на дальнейшее совершенствование преобразователей частоты, что открывает перспективы для широкого применения частотного регулирования. Подробное описание законов управления при частотном регулировании и анализ работы асинхронного двигателя при питании от преобразователя частоты даны в § 4.13 и 4.14.
Регулирование путем изменения числа полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 4.35 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля увеличивается в два раза.
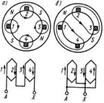 |
| Рис. 4.35. Схема переключения одной фазы обмотки статора для изменения числа полюсов: а – при 2 р = 4; б – при 2 р = 2 |
При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но, так как частота вращения возрастает в два раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюювыполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
На рис. 4.36 показаны наиболее часто употребляемые схемы соединений обмотки статора с переключением числа полюсов в отношении 2:1. Схемы, приведенные на рис. 4.36, а и б, обеспечивают переключение при постоянном моменте, а схемы, приведенные на рис. 4.36, в и г, - при приблизительно постоянной мощности.
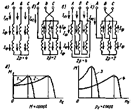 | Рис. 4.36. Принципиальные схемы соединения обмотки статора с переключением числа полюсов в отношении 2:1 и механические характеристики двигателей при таком переключении |
Рассмотрим отношение потребляемых мощностей P 1 и моментов М для рассматриваемых схем при упрощенном предположении, что линейное напряжение Uл, ток Iф в каждой полуобмотке фазы статора, КПД η и cos φ остаются неизменными. При этом для схем, изображенных на рис. 4.36, а и б, имеем
(В уравнениях (4.63) и (4.64) индексы «1» обозначают меньшую частоту вращения, а индексы «2» — большую частоту вращения.
При использовании схем, приведенных на рис. 4.36, в и г, обычно для обеих частот вращения указывают одинаковую мощность, т. е. принимают, что Р12 = Р11 и М2 = 0,5М1. Механические характеристики двигателя при переключении полюсов двумя рассмотренными методами приведены на рис. 4.36, д, кривые 1 и 2 — при постоянном моменте, кривые 3 и 4 — при постоянной мощности.
Как видно из схем, приведенных на рис. 4.36, при переходе от меньшей частоты вращения к большей изменяется направление тока в половине полуобмоток фаз статора. Для того чтобы направление вращения поля при этом осталось неизменным, необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопро-тивлений R доб1, R доб2, R доб3 и других изменяется форма зависимости М = f(s) и механической характеристики n2 = f(M) двигателя (рис. 4.37, а). При этом некоторому нагрузочному моменту М н соответствуют скольжения s1, s2, s3,..., большие, чем скольжения s e, при работе двигателя на естественной
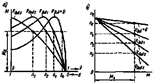 | Рис. 4.37. Изменение формы механической характеристики при регулировании частоты вращения с помощью добавочного активного сопротивления |
характеристике (при R доб = 0). Следовательно, установившаяся частота вращения двигателя уменьшается от nе до п1 п2, п3,... (рис. 4.37,б).
 |
| Рис. 4.38. Изменение формы механической характеристики при регулировании частоты вращения путем изменения питающего напряжения |
Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
Регулирование путем изменения величины питающего напряжения. Для двигателей нормального исполнения такое регулирование неприменимо, так как при уменьшении питающего напряжения резко уменьшается максимальный момент М max (рис. 4.38, кривые 1, 2 и 3). Критическое скольжение, определяющее зону устойчивой работы двигателя, остается при этом неизменным: s кp = 0,1 ÷ 0,2. Принципиально рассматриваемый метод можно было бы использовать для регулирования двигателей с большим активным сопротивлением ротора, так как в этом случае скольжение s 'кp резко возрастает и максимум момента сдвигается в зону, близкую к s = 1 (кривые 1', 2' и 3'), и даже в область, где s > 1. Однако это ведет к значительному увеличению потерь мощности и снижению КПД, поэтому такой метод регулирования частоты вращения можно
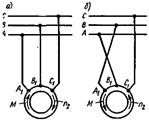 |
| Рис. 4.39. Схемы включения двигателя при изменении направления вращения |
применять только в микродвигателях, для которых величина КПД не имеет решающего значения.
| 18 Принцип действия синхронного двигателя |
Если в области вращающегося магнитного поля укрепить электромагнит постоянного тока, способный вращаться соосно с магнитным полем (рис.7.27), то сила взаимодействия полей в течение одного оборота вращающегося поля будет дважды менять свое направление (притягивание разноименных полюсов поля и магнита и отталкивание одноименных, когда они оказываются друг против друга). Такая пульсация момента по направлению действия и инерционность массы электромагнита, препятствующая мгновенному восприятию движения под действием силы, приводят к тому, что электромагнит остается неподвижным. 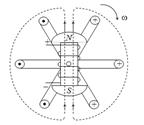 Рис. 7.27. Упрощенная конструкция синхронного двигателя Однако если его привести во вращение посредством какого-либо устройства с частотой, близкой к частоте вращения поля, то сила взаимодействия полей окажется способной втянуть электромагнит (ротор) во вращение, синхронное с полем («втянуть в синхронизм»). Поле ротора и вращающееся магнитное поле окажутся друг относительно с другом неподвижными, и ротор будет следовать в своем движении за полем. Их частоты вращения будут одинаковы (синхронное вращение). Рис. 7.27. Упрощенная конструкция синхронного двигателя Однако если его привести во вращение посредством какого-либо устройства с частотой, близкой к частоте вращения поля, то сила взаимодействия полей окажется способной втянуть электромагнит (ротор) во вращение, синхронное с полем («втянуть в синхронизм»). Поле ротора и вращающееся магнитное поле окажутся друг относительно с другом неподвижными, и ротор будет следовать в своем движении за полем. Их частоты вращения будут одинаковы (синхронное вращение). |
Синхронный двигатель имеет ряд преимуществ перед асинхронным:
1. Высокий коэффициент мощности cosФ=0,9.
2. Возможность использования синхронных двигателей на предприятиях для увеличения общего коэффициента мощности.
3. Высокий КПД он больше чем у асинхронного двигателя на (0,5-3%) это дастигается за счёт уменьшения потерь в меди и большого CosФ.
4. Облодает большой прочностью обусловленной увеличенным воздушным зазором.
5. Вращающиймамент синхронного двигателя прямо пропорционален напряжению в первой степени. Т.е синхронный двигатель будет менее чуствителен к изменению величины напряжения сети.
Недостатки синхронного двигателя:
1. Сложность пускавой аппаратуры и большую стоимость.
2. Синхронные двигатели применяют для приведения в движение машин и механизмов, не нуждающихся в изменении частоты вращения, а так же для механизмов у которых с изменением нагрузки частота вращения остаётся постоянной: (насосы, компрессоры, вентиляторы.)
19. Электродвигатели переменного тока
Электродвигатели переменного тока – электрические машины, преобразующие электрическую энергию в механическую, а также являются наиболее совершенным и распространенным видом привода машин и механизмов, преобразующих электрическую энергию в механическую.
В основе работы электродвигателей лежит процесс электромагнитной индукции, которая возникает при движении проводящей среды в магнитном поле.
В качестве проводящей среды обычно используется обмотка, состоящая из достаточно большого количества проводников, соединенных между собой надлежащим способом. Магнитное поле в электродвигателе создается либо с помощью постоянных магнитов, либо возбуждающими обмотками, которые обтекаются токами. Электродвигатели обратимы, то есть могут работать по преобразованию электрической энергии в механическую и наоборот, в режиме генератора.
Электродвигатели состоят из защитного корпуса, в котором находится неподвижный полый цилиндрический статор, набранный из отдельных, изолированных друг от друга пластин электротехнической (магнитной) стали. На внутренней стороне статора в пазах расположены витки обмотки возбуждения из медной проволоки. Внутри статора располагается подвижный, вращающийся на валу ротор, состоящий тоже из стальных пластин, также изолированных друг от друга термостойким лаком. В пазах ротора располагаются витки медной обмотки. Обмотка статора подсоединяется к источнику переменного тока.
Электродвигатели переменного тока делятся на синхронные и асинхронные, в зависимости от того, в каком отношении находится скорость вращения к частоте.
Синхронные электрические двигатели – такие двигатели, скорость вращения которых находится в постоянном отношении к частоте электрической сети, для асинхронных – отношение непостоянно. Скорость вращения асинхронных двигателей изменяется с изменением нагрузки.
Асинхронные электродвигатели могут иметь преобразовательное устройство в виде коллектора (коллекторные машины), или быть без него (бесколлекторные).

