 2015-05-26
2015-05-26 6931
6931Тахогенераторы (ТГ) постоянного тока (ТГП) функционально предназначены для преобразования частоты вращения вала в пропорциональное частоте выходное напряжение постоянного тока. Выходное напряжение ТГ используется для дистанционного измерения или индикации частоты вращения исполнительных механизмов и для выработки управляющих сигналов в системах автоматического регулирования. Тахогенераторы постоянного тока бывают с возбуждением от постояиных магнитов и с электромагнитным возбуждением.
Основными показателями, характеризующими функциональные свойства ТГП, являются крутизна, нелинейность, асимметрия, коэффициент пульсации и температурный коэффициент выходного напряжения.
Крутизна выходной характеристики ТГП S определяется как изменение выходного напряжения на единицу частоты вращения ротора.
Нелинейность изменения выходного напряжения Н представляет собой полусумму абсолютных значений наибольшей положительной и наибольшей отрицательной погрешностей выходного напряжения в отдельных точках характеристики. При этом погрешность выходного напряжения AU при некоторой установленной частоте вращения в процентах вычисляется по формуле
К тахогенераторам переменного тока относятся синхронные, асинхронные и индукторные тахогенераторы.
А м п л и т у д н о й погрешностью называется отклонение реальной характеристики U = f (n) от идеальной.
Уменьшению амплитудной погрешности способствует правильная калибровка АТГ, т.е. настройка схемы, в которой работает АТГ, на оптимальный наклон идеальной выходной характеристики АТГ
Ф а з о в а я погрешность - отклонение фазы выходного напряжения от фазы напряжения, принятого за базовое. Чаще всего в качестве последнего берут напряжение возбуждения.
Физическая природа фазовой погрешности в основном определяется индуктивными сопротивлениями статора и особенно ротора.
Н у л е в о й с и г н а л - напряжение на генераторной обмотке при неподвижном роторе. Нулевой сигнал U0 не остается постоянным при повороте ротора. Он содержит две составляющие: постоянную и переменную
Постоянная составляющая обуславливается: а) неточным сдвигом обмоток на 9О эл. град; б) наличием короткозамкнутых контуров в сердечниках и обмотках; в) неодинаковой магнитной проводимостью вдоль и поперек проката; г) неравномерным воздушным зазором; д) наличием потоков рассеяния и другими причинами, проводящими к магнитной связи двух, казалось бы, перпендикулярных обмоток. У большинства АТГ она достигает 25÷100 мВ.
Переменная составляющая обуславливается неодинаковой толщиной стенок в различных частях полого ротора, что приводит к разности активных сопротивлений элементарных контуров, к разности токов и потоков этих контуров. Она составляет 3÷7 мВ.
Для борьбы с постоянной составляющей нулевого сигнала, обмотки часто размещают на разных статорах: одну на внутреннем, другую на внешнем, а затем при сборке АТГ внутренний статор поворачивают до тех пор, пока нулевой сигнал не станет минимальным. В этом положении статор фиксируют.
Для борьбы с переменной составляющей ротор калибруют, т.е. удаляют часть металла, добиваясь его максимальной электрической симметрии.
А с и м м е т р и я выходного напряжения - неравенство напряжений АТГ при вращении с одинаковой угловой скоростью в противоположных направлениях: U+n # U-n. Особенно ярко она проявляется на малых частотах вращения. Главная причина несимметрии заключается в наличии остаточной ЭДС (нулевого сигнала). Действительно, при смене направления вращения фаза основной ЭДС генераторной обмотки Ег изменяется на 180о, тогда как фаза нулевого сигнала Uo остается постоянной (рис. 4.7). В результате результирующая ЭДС выходной обмотки изменяется по величине: Ег.р(+n)# Eг.р(-n). Самый эффективный способ борьбы с асимметрий выходного напряжения является уменьшение нулевого сигнала.
Т е м п е р а т у р н а я погрешность. При изменении температуры окружающей среды, при нагревании АТГ в процессе работы изменяются активные сопротивления обмоток статора и ротора. Это приводит к дополнительному отклонению выходной характеристики от идеальной, к появлению дополнительных амплитудных и фазовых погрешностей. Наибольшее влияние в этом отношении оказывает изменение сопротивления обмотки возбуждения. Поэтому часто последовательно с ней включают терморезисторы, стабилизирующие полное сопротивление этой цепи.
С целью уменьшения влияния температуры на сопротивление ротора, его изготавливают из материала с низким температурным коэффициентом (манганина константана и др.)
Тахогенераторы постоянного тока
Тахогенераторы постоянного тока - это небольшие генераторы постоянного тока чаще с возбуждением тока при помощи постоянных магнитов, реже - с независимым возбуждением (рис. 6.8). Конструктивно они не отличаются от обычных машин постоянного тока малой мощности.
Выходное напряжение тахогенератора UГ может быть выражено так же, как напряжение обычного генератора постоянного тока через ЭДС якоря ЕГ, падение напряжения в обмотке якоря IГrГ и падение напряжения на щеточном контакте Δ Uщ:

где I г - ток в обмотке якоря; rГ - сопротивление обмотки якоря.
Выразим ЭДС якоря через магнитный поток Ф и частоту вращения n:

а ток якоря - через напряжение на выходе UГ и сопротивление нагрузки RH (см. рис. 6.8):

и, подставив (6.2), (6.3) в (6.1), получим

где cЕ - постоянная, определяемая конструктивными параметрами генератора.

Используя (6.4), найдем окончательное выражение для выходного напряжения:

Если пренебречь падением напряжения на щеточном контакте (принять Δ U щ = 0), то выражение (6.5) примет вид

При постоянных потоке Ф, сопротивлениях якоря rГ и нагрузки RH

где величина

есть крутизна выходной характеристики тахогенератора.
При Ф = const, r Г = const и RH = const крутизна к постоянна и выходная характеристика тахогенератора (рис. 6.9) является прямой линией. У современных тахогенераторов постоянного к она находится в пределах от 3 до 100 мВ/(об/мин).
Чем больше сЕ, Ф, RH и меньше rГ, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе тахогенератора, когда RH = ∞ (см. прямую 1 на рис. 6.9):

Чем меньше сопротивление нагрузки RH, тем меньше крутизна выходной характеристики (см. прямую 2 на рис. 6.9).
Влияние сопротивления щеточного контакта на выходную характеристику легко установить, анализируя равенство (6.5). При Δ Uщ ≠ 0, что бывает в реальных тахогенераторах, выходная характеристика UГ = f(n) пересекает ось ординат (при n = 0) не в начале координат, а в точке U г ’ = Δ Uщ /(1 + r г /RH) (см. прямую 3 на рис. 6.9).

За счет падения напряжения на щеточном контакте у тахогенератора постоянного тока появляется зона нечувствительности - зона частот вращения от n = 0 до n = nmin, при которых выходное напряжение U гравно нулю. Границу зоны нечувствительности легко найти из выражения (6.5), считая U г = 0:

В целях уменьшения зоны нечувствительности необходимо тщательно подбирать щетки, чтобы они обеспечивали минимальное падение напряжения Δ UЩ. В обычных тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки, а в прецизионных тахогенераторах особенно ответственных систем автоматики - проволочные щетки с серебряным, золотым или даже платиновым покрытием.

Влияние реакции якоря в тахогенераторах постоянного тока проявляется в виде искажения выходной характеристики. Если тахогенератор рассчитан так, что он работает на изгибе магнитной характеристики (рис. 6.10), то при малом сопротивлении нагрузки RH вследствие значительного тока I г и его увеличения с ростом n магнитный поток Ф тахогенератора не остается постоянным. Из-за размагничивающего действия реакции якоря магнитный поток с увеличением скорости уменьшается, что приводит к уменьшению крутизны k выходной характеристики, которую можно записать в виде

изменению ее вида (см. кривую 4 на рис. 6.9) и появлению скоростной амплитудной погрешности, составляющей у современных тахогенераторов 0,5...3 %.
Устройство и принцип действия асинхронного тахогенератора
Асинхронные тахогенераторы по своей конструкции не отличаются от двухфазных асинхронных исполнительных двигателей с полым немагнитным ротором. Так же как и двигатели, они имеют на статоре две фазные обмотки, оси которых смещены в пространстве относительно друг друга на угол 90°. Одна из них B (рис. 6.4, а) подключается к сети и называется обмоткой возбуждения. С другой обмотки Г снимается выходное напряжение тахогенератора. Эта обмотка называется выходной, или генераторной.
В зависимости от места расположения обмоток различают три конструктивные формы асинхронных тахогенераторов:
· с обмотками только на внешнем статоре;
· с обмотками только на внутреннем статоре;
· с одной обмоткой на внешнем статоре и одной - обычно обмоткой возбуждения - на внутреннем.
Полый ротор асинхронного тахогенератора в отличие от ротора исполнительного двигателя с целью обеспечения большого активного сопротивления, мало меняющегося при изменении температуры, выполняется (в точных тахогенераторах) из константана, специального манганина, фосфористой или марганцовистой бронзы и т. п.
Рассмотрим сначала физические процессы, протекающие в асинхронном тахогенераторе при n = 0.
При неподвижном роторе (n = 0) ток обмотки возбуждения создает пульсирующий по продольной оси d магнитный поток Ф dS, который, пронизывая ротор, наводит в нем ЭДС трансформации (см. рис. 6.4, а). Контуры токов ротора от ЭДС трансформации располагаются в плоскостях, перпендикулярных продольной оси d - оси потока возбуждения Ф dS. Эти токи создают магнитный поток ротора Ф dR, направленный навстречу потоку возбуждения Ф ds и, который, как в любом трансформаторе, компенсируется возрастающим током первичной обмотки - обмотки возбуждения.
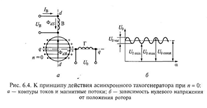
Теоретически при неподвижном роторе (n = 0) в тахогенераторе магнитный поток имеется только по продольной оси - оси обмотки возбуждения, поэтому в генераторной обмотке, ось которой смещена на 90° к обмотке возбуждения, никаких ЭДС наводиться не должно. Однако у всех тахогенераторов и при n = 0 на зажимах генераторной обмотки имеется некоторое незначительное напряжение, которое называется нулевым или остаточным.
Нулевое напряжение U0 - напряжение при n = 0 - явление весьма нежелательное. Причины его возникновения весьма разнообразны:
а) неточный сдвиг обмоток;
б) несимметрия магнитной цепи из-за разной проводимости стали вдоль и поперек проката, наличия короткозамкнутых контуров, неравномерности воздушного зазора;
в) наличие потоков рассеяния;
г) наличие емкостных связей между обмотками, особенно заметных в тахогенераторах с повышенной частотой питающего напряжения;
д) несимметрия полого ротора и т.п.
Большинство указанных причин приводят к тому, что в тахогенераторе при n = 0 появляется поперечная составляющая магнитного потока, которая наводит ЭДС E0 в генераторной обмотке.
Значение нулевого напряжения U0 не остается постоянным при повороте ротора (рис. 6.4, б). Его можно разделить на постоянную U0 const и переменную U 0var составляющие.
Постоянная составляющая U0 const, обусловленная причинами, указанными ранее в пунктах «а...г», у большинства тахогенераторов находится в пределах от 25 до 100 мВ.
Переменная составляющая U0var = U0max – U0min (см. рис. 6.4, б) зависит в основном от толщины, т.е. неодинаковой электрической проводимости полого ротора в различных направлениях (от его несимметрии). Она обычно составляет 3...7 мВ.
Для борьбы с постоянной составляющий нулевого напряжения очень часто обмотки возбуждения и генераторную размещают на разных статорах: одну - на внутреннем, другую - на внешнем. При сборке тахогенератора внутренний статор поворачивают относительного внешнего, находят положение, соответствующее U0min, и в этом положении фиксируют.
В целях борьбы с переменной составляющей нежелательного нулевого напряжения тщательно обрабатывают и калибруют ротор, добиваясь его максимальной симметрии в электрическом отношении. К уменьшению переменной составляющей остаточного напряжения ведет увеличение числа p пар полюсов обмоток статора. Как уже говорилось ранее, обычно 2 p > 4.
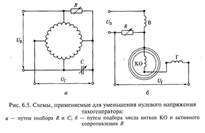
В целом ряде тахогенераторов для борьбы с нулевым напряжением применяются специальные схемы. Они весьма разнообразны. На рис. 6.5 в качестве примера показаны две наиболее простые из них. В первой схеме (см. рис. 6.5, а) нулевое напряжение уменьшается путем подбора R и С, во второй (см. рис. 6.5, б) -путем подбора числа витков компенсационной обмотки (КО), расположенной на внутреннем статоре, и значения активного сопротивления R. Недостатки этих схем: во-первых, неполное устранение U0; во-вторых, наличие электрической связи между обмотками возбуждения и генераторной.
При вращении ротора (n ≠ 0) его «волокна» - элементарные проводники пересекают магнитный поток возбуждения Ф dS, и в них, кроме ЭДС трансформации, наводится еще ЭДС вращения (резания). Под действием ЭДС вращения по ротору протекают токи, контуры которых при большом активном сопротивлении ротора практически совпадают с осью потока возбуждения Ф dS (рис. 6.6). Эти токи создают свой магнитный поток ротора Ф dR, который направлен по поперечной оси q тахогенератора. Поток Ф dR, сцепляясь с витками генераторной обмотки Г, наводит в них ЭДС ЕГ - выходную ЭДС тахогенератора. Частота этой ЭДС равна частоте сети. Действительно, так как ЕГ = ωг × (d Ф qR / dt), то ее частота равна частоте изменения потока Ф qR, вызываемого токами от ЭДС вращения. Частота ЭДС вращения при n = const равна частоте изменения во времени потока Ф dS, которым она наводится: Евр ~ Ф dSn; таким образом, частота изменения ЕГ во времени равна частоте питающей сети - напряжения U B.

ЭДС вращения ротора ЕqR, поток ротора Ф qR поперечной оси и выходная ЭДС ЕГ тахогенератора по значению (амплитуде) пропорциональны частоте вращения ротора n, т.е. ЕГ ~ Ф qR ~ n.
Выходное напряжение тахогенератора UГ меньше ЭДС ЕГ на значение падения напряжения на сопротивлении ZГ генераторной обмотки, т. е. UГ = ЕГ - IГZГ.
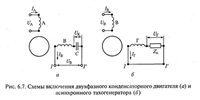
На рис. 6.7, а представлена схема включения двухфазного несимметричного асинхронного двигателя с конденсатором C в цепи обмотки В. На рис. 6.7, б представлена схема включения асинхронного тахогенератора. Сравнивая эти схемы, нетрудно заметить, что они весьма похожи друг на друга, только в схеме тахогенератора зажимы 1 -Г, на которые у двигателя подается напряжение UB, замкнуты накоротко; следовательно, у тахогенератора UB = 0. Также в схеме тахогенератора вместо конденсатора С включено сопротивление нагрузки Z H.
Выходное напряжение тахогенератора UГ может быть найдено как падение напряжения на сопротивлении Z H нагрузки:

К положительным качествам асинхронных тахогенераторов, которые способствуют их весьма широкому распространению, следует отнести:
· бесконтактность - отсутствие скользящих контактов;
· малоинерционность, обусловленную малым моментом инерции ротора;
· наличие малого момента сопротивления (трения в подшипниках и тормозящего электромагнитного) вследствие отсутствия радиальных и аксиальных сил, действующих на ротор;
· большую надежность;
· неплохую стабильность характеристик.
· Недостатками асинхронных тахогенераторов, ограничивающих области их применения, являются:
· теоретическая и практическая нелинейность выходной характеристики;
· наличие фазовой погрешности;
· наличие нулевого (остаточного) напряжения;
· малая выходная мощность, что приводит к необходимости увеличения габаритных размеров (асинхронный тахогенератор в 2...4 раза больше тахогенератора постоянного тока с такой же выходной мощностью);
· низкий cosφ;
· большие габаритные размеры и масса.
Однако несмотря на наличие ряда существенных недостатков, асинхронные тахогенераторы с полым ротором как у нас, так и за рубежом выпускаются в больших количествах.
Тахогенераторы. Общие сведения
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения - вращения вала - в электрический сигнал - выходное напряжение.
Основное требование, которое предъявляется к большинству тахогенераторов, - линейность выходной характеристики, т.е пропорциональность выходного напряжения UГ частоте вращения n (рис. 6.2):

где k, k1 - постоянные величины; α - угол поворота.
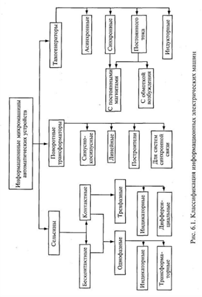
По роду тока можно различать тахогенераторы переменного и постоянного тока. Тахогенераторы переменного тока могут быть асинхронными и синхронными. Тахогенераторы постоянного тока могут быть либо с постоянными магнитами, либо с электромагнитным возбуждением (с обмоткой возбуждения).

Тахогенераторы в схемах автоматики используются для следующих целей:
· измерения скорости вращения. В этом случае выходное напряжение подается на вольтметр, шкала которого отградуирована в об/мин;
· осуществления обратной связи по скорости в следящих системах;
· осуществления электрического дифференцирования: UГ = k1(d α /dt);
· осуществления электрического интегрирования:

Основные требования, предъявляемые к тахогенераторам:
· высокая линейность выходной характеристики - минимальное отклонение ее от прямой UГ = kn, являющейся идеальной выходной характеристикой тахогенератора;
· большая крутизна выходной характеристики k = UГ / n, мВ/(об/мин);
· симметрия выходного напряжения: UГ(+n) = UГ(-n);
· минимальное значение нулевого напряжения UГ при n = 0 (у тахогенераторов переменного тока) и минимальная зона нечувствительности (у тахогенераторов постоянного тока);
· максимальная выходная мощность при минимальной потребляемой мощности;
· минимальная пульсация выходного напряжения (у тахогенераторов постоянного тока);
· минимальное изменение фазы выходного напряжения (у тахогенераторов переменного тока);
· малый момент инерции ротора и малый момент сопротивления;
· стабильность выходной характеристики при изменении окружающих условий;
· малые габаритные размеры и масса;
· высокие показатели надежности (ресурс, интенсивность отказов и др.).
К тахогенераторам, предназначенным для разных целей, предъявляются различные требования. Так, к тахогенераторам, обеспечивающим обратную связь по скорости и демпфирование следящих систем, предъявляются повышенные требования по крутизне выходной характеристики и мощности выходного сигнала. Линейность выходной характеристики для них не играет существенной роли.

К тахогенераторам, предназначенным для выполнения операций дифференцирования и интегрирования, наоборот, предъявляются повышенные требования в отношении линейности, точности, стабильности характеристик, в то время как значение мощности выходного сигнала и крутизна выходной характеристики здесь не являются определяющими факторами.
Рассмотрим более подробно работу тахогенераторов как дифференцирующих и интегрирующих элементов.
Для дифференцирования какой-либо функции необходимо вращать ротор тахогенератора - поворачивать его на углы а, пропорциональные данной функции. Выходное напряжение при этом будет прямо пропорционально производной заданной функции:

В тех случаях, когда производная заданной функции должна быть представлена в виде угловой величины, необходимо использовать специальную схему (рис. 6.3, а), состоящую из асинхронного тахогенератора (AT), элемента сравнения (ЭС), усилителя (У), исполнительного двигателя (ИД), редуктора (Р), линейного поворотного трансформатора (ЛПТ). Частота вращения ЛПТ пропорциональна производной d α /dt.
Для интегрирования заданной функции по времени (рис. 6.3,6) нужно преобразовывать ее в электрическое напряжение U(t) и вращать ротор тахогенератора так, чтобы его выходное напряжение UГ(t) в любой момент времени компенсировало напряжение U(t). Тогда угол поворота ротора тахогенератора будет пропорционален интегралу заданной функции по времени:









