 2015-06-11
2015-06-11 337
3371.1. Двигатель постоянного тока с независимой обмоткой возмущения и управлением со стороны якорной обмотки.
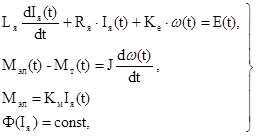 (1)
(1)
где Iя(t) - ток якорной обмотки двигателя, А,
w (t) - частота вращения вала двигателя, рад/с;
МT(t) = F(t) - тормозной момент на валу, Н×м;
Ф(Iя) - поток, создаваемый обмоткой возбуждения, Вб;
Е(t) - напряжение на якорной обмотке двигателя, В;
J = Jя + Jпм - суммарный (приведенный) момент инерции вращающихся масс, кг×м2;
Rя, Lя - активное и индуктивное сопротивления якорной обмотки;
Примечание. В настоящем варианте лабораторной работы J=JЯ
Ке(Ce), Км(Cм) - электрическая и электромеханическая конструктивные постоянные двигателя.
1.2. Двигатель постоянного тока с управлением по цепи якорной обмотки и по цепи обмотки возбуждения.
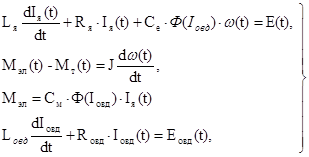 (2)
(2)
где Iовд(t), Еовд(t) - ток в обмотке (A) и напряжение(B) на зажимах обмотки возбуждения двигателя;
Lовд, Rовд - индуктивное и активное сопротивления обмотки возбуждения.
Таблица 1
Универсальная характеристика  =f(
=f( )
)
 =(Ф/Фн) =(Ф/Фн)
| 0.37 | 0.65 | 0.82 | 0.92 | 1.0 | 1.05 | |
 = Iовд/Iовдн = Iовд/Iовдн
| 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 |








