 2015-06-05
2015-06-05 1683
1683Типовые переходные процессы. К качеству регулирования каждого технологического процесса предъявляют конкретные требования; в одних случаях оптимальным может служить процесс, обеспечивающий минимальное значение yдин, в других случаях — минимальное значение tp. Поэтому в соответствии с требованиями технологии в качестве оптимального выбирают один из следующих типовых переходных процессов (рис. 8.2):
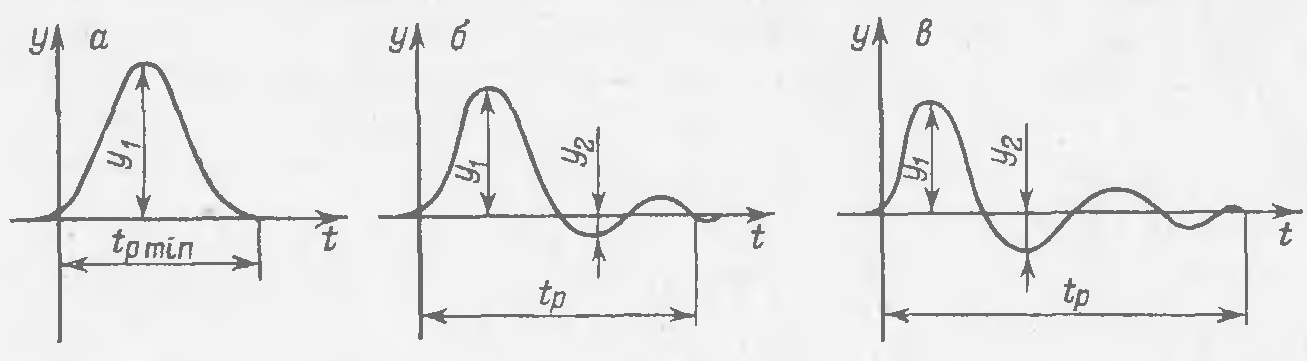
Рис. 8.2. Типовые переходные процессы:
а — граничный апериодический с минимальным временем регулирования; б —с 20%-ным перерегулированием; о — с минимальной квадратичной площадью отклонения (min y2dt)
граничный апериодический процесс характеризуется отсутствием перерегулирования, минимальным временем регулирования и наибольшей динамической ошибкой регулирования по сравнению с другими типовыми процессами. Такой процесс используется в качестве оптимального при сильном влиянии регулирующего воздействия в объекте на другие технологические величины объекта, что ограничивает степень воздействия регулятора на объект и вследствие этого приводит к большому отклонению регулируемой величины от заданного значения;
процесс с 20%-ным перерегулированием характеризуется меньшим отклонением регулируемой величины и большим временем регулирования, чем в предыдущем случае. Этот процесс выбирают в качестве оптимального, когда допустима большая степень воздействия регулятора на объект и возможно некоторое перерегулирование;
процесс с минимальной квадратичной площадью отклонения регулируемой величины обладает значительным (до 40%) перерегулированием, наибольшим временем регулирования и наименьшей величиной динамической ошибки регулирования по сравнению с другими типовыми процессами. Он возникает при большой величине регулирующего воздействия и применяется в качестве оптимального, если на величину динамической ошибки регулирования накладываются жесткие ограничения.
Переходный процесс в АСР зависит от динамических характеристик объекта регулирования, характера и величины возмущающего воздействия, от закона регулирования и числовых" значений параметров настройки регулятора. Для достижения требуемого качества регулирования при известных динамических характеристиках объекта и выбранном типовом переходном процессе подбирают необходимый закон регулирования и определяют параметры настройки регулятора.
Импульсной переходной функцией w(x) называется реакция системы на единичное импульсное воздействие:
Импульсную переходную функцию часто называют весовой функцией. Используя таблицу соответствия (см. табл. 8.1, вторая строка), вы-полним операцию обратного преобразования уравнения (8.37) и найдем выражение импульсной переходной функции:
Воспользуемся теоремой Виетта, таблицей соответствия (табл. 8.1, строка шестая) и запишем:
где p 1 и p 2 – простые корни характеристического уравнения
Подставив числовые значения коэффициентов дифференциального уравнения системы (8.36) в решение (8.40) и задаваясь дискретными значениями времени т, можно построить график импульсной переходной функции w(x) (рис. 8.11).
Переходной функцией h (т) называется реакция системы на единичное ступенчатое воздействие x(х) = 1(т) (рис. 8.12).
Используя таблицу соответствия (табл. 8.1, первая строка), выпол-ним операцию обратного преобразования уравнения (8.37) и найдем выражение переходной функции
Воспользуемся теоремой Виетта, таблицей соответствия (табл. 8.1, строка седьмая) и запишем:
где p 1 = -a1 и p2 = -а2 - простые корни характеристического уравнения.
Так как произведение выражение примет окончательный вид
Подставив числовые значения коэффициентов дифференциального уравнения системы (8.36) в решение (8.43) и задаваясь дискретными значениями времени
 , можно построить график переходной функции h (τ) (рис. 8.13).
, можно построить график переходной функции h (τ) (рис. 8.13).
Реакции систем на единичное импульсное и единичное ступенчатое воздействие обычно называют временными характеристиками.

