 2015-06-05
2015-06-05 3760
3760Для оценки свойств синхронных генераторов используют те же характеристики, что и для генераторов постоянного тока. Только условия, при которых определяются внешняя и регулировочная характеристики, несколько дополняются.
 |
| Рис. 11.6. Внешние характеристики синхронного генератора |
 |
| Рис. 11.7. Регулировочные характеристики синхронного генератора |
11.5.1. Характеристика холостого хода. Основной магнитный поток синхронного генератора является функцией тока возбуждения, т. е. Ф0 (I в).
Если в (11.1) заменить f согласно (11.2), а магнитный поток записать как функцию тока возбуждения Ф0(I в), получим
(11.10)
| Е 0 = 4,44 kw | рn | Ф0(I в). |
Изменяя с помощью реостата r р (см. рис. 11.4) ток I в, можно менять тем самым поток Ф0 и, следовательно, ЭДС Е 0. Характеристика холостого хода синхронного генератора Е 0 (I в) не отличается от характеристики холостого хода генераторов постоянного тока (см. рис. 9.13) и определяется при тех же условиях, т. е. при I = 0 и n = const.
11.5.2.Внешние характеристики. Как говорилось ранее, внешняя характеристика генератора независимого возбуждения U (I) определяется при следующих условиях: n = const и I в = const. Так как напряжение синхронного генератора зависит при прочих равных условиях еще от характера нагрузки, то дополнительным условием, при котором следует определять внешнюю характеристику синхронного генератора, должно быть постоянство коэффициента мощности, т. е. cos φ = const.
Внешние характеристики синхронного генератора при активной (φ = 0), активно-индуктивной (φ > 0) и активно-емкостной (φ < 0) нагрузках приведены на рис. 11.6. Они являются наглядной иллюстрацией того, что говорилось в § 11.4 о влиянии характера нагрузки на напряжение генератора.
Относительное изменение напряжения генератора, %, оценивают по формуле
| Δ u ном = | U х - U ном | 100 = | Δ U ном | 100, |
| U ном | U ном |
где U х — напряжение генератора при холостом ходе (I = 0), равное ЭДС; U ном — напряжение при номинальной нагрузке (I = I ном).
В случае наиболее часто встречающейся активно-индуктивной нагрузки при cos φ ≈ 0,8 относительное изменение напряжения Δ u ном у некоторых генераторов доходит до 35 — 45%.
11.5.3.Регулировочные характеристики. Естественно, что поскольку напряжение синхронного генератора изменяется при изменении нагрузки в значительных пределах, необходимо принимать меры для уменьшения изменения напряжения. Этого можно добиться, очевидно, за счет соответствующего изменения ЭДС генератора E 0 путем воздействия на его ток возбуждения I в. О том, как и в каких пределах необходимо изменять ток возбуждения при изменении тока нагрузки генератора, чтобы поддерживать U = const, и дают представление регулировочные характеристики (рис. 11.7).
Дополнительным условием, при котором должна определяться каждая из характеристик (кроме n = const), является cos φ = const.
Следует обратить внимание на то, что для нормальных условий работы приемников электрической энергии необходимо поддерживать напряжение и частоту синхронного генератора на заданных уровнях. Для этого синхронные генераторы снабжаются в большинстве случаев регуляторами, управляющими напряжением и частотой вращения генераторов и воздействующими на ток возбуждения генераторов и момент первичного двигателя.
2.Система электропривода с непосредственным преобразователем частоты и асинхронным двигателем.
3. Схема управления пуском в функции времени и остановкой с динамическим торможением двигателем постоянного тока независимого возбуждения.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
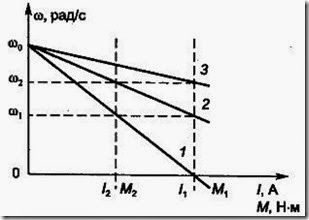
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
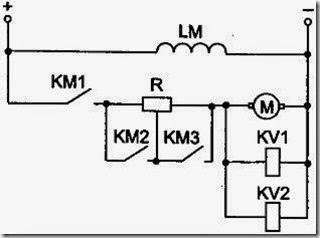
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
· По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
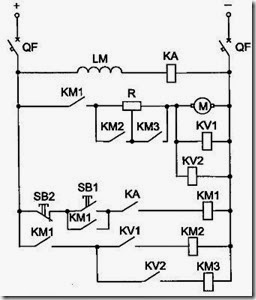
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
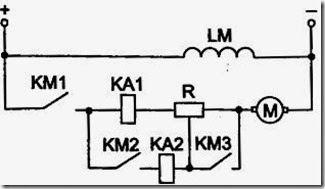
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
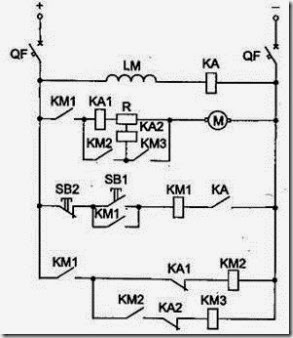
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
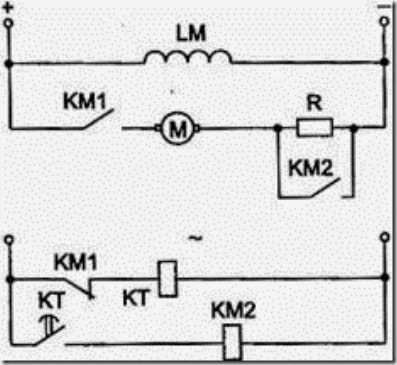
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1...КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания срезистором в цепи якоря.
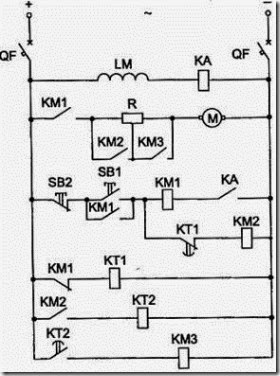
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Торможение ДПТ
Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов: противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Торможение электропривода посредством переключения обмоток фаз электродвигателя для получения вращения поля в противоположном направлении (торможение противовключением) применяют, когда необходимо быстро остановить машинное устройство. При этом по инерции ротор вращается навстречу магнитному потоку, скольжение электродвигателя становится больше единицы, а момент — отрицательным.
В двигателе постоянного тока для осуществления торможения противовключением меняют подключение концов обмоток якоря. При этом ток в якоре и момент меняют направление.
В обоих случаях действующее напряжение становится большим, поэтому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора. Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо) с рассеиванием энергии торможения в тормозных резисторах и обмотках электродвигателя.
Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя.
Постоянный ток создает неподвижное магнитное поле. При вращении ротора в его обмотках наводится ЭДС и появляется ток. Взаимодействие тока ротора с неподвижным магнитным полем создает тормозной момент. Значение тормозного момента зависит от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
В режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большейωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть.
Типовые узлы схем управления торможением двигателей постоянного тока
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
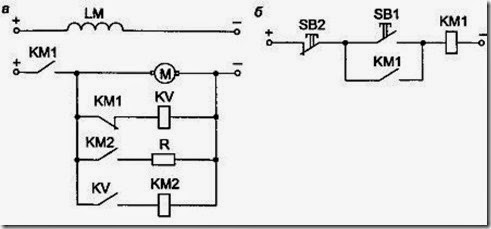
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
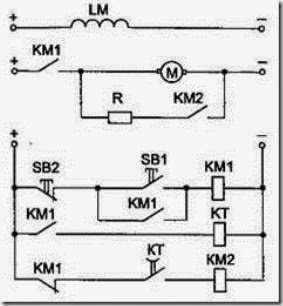
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Регулирование скорости ДПТ
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря. Схема включения двигателя для этого случая представлена на рис. 12, а электромеханические и механические характеристики — на рис. 2, а.
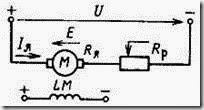
Рис. 12. Схема включения двигателя постоянного тока независимого возбуждения
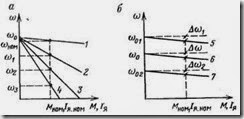
Рис. 13. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D= 2 - З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 13, а и 13, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Реверс ДПТ
Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя и соответственно направление вращения ротора.
H-мост представляет собой электронную схему, которая позволяет изменить направление движения потока электронов через определенный участок схемы. Эти схемы часто используются в робототехнике для запуска двигателей постоянного тока вперед и назад. Конструктивные решения (Рисунок 14) схемы могут быть разными, но принцип у них общий Н-мост имеет четыре ключа (выключателя, реле, транзистора, тиристора и т.п.), обозначенных на рисунке S1, S2, S3, S4. Состояния ключей могут иметь различные комбинации, практически значимыми являются следующие (Рисунок 15):
| включены | выключены | результат |
| S1 и S2 | S3 и S4 | Вращение вперед |
| S3 и S4 | S1 і S2 | Вращение назад |
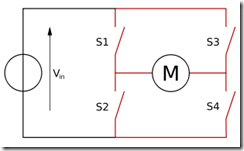
Рисунок 14 – Схема реверсирования ДПТ
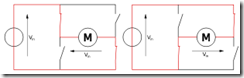
Рисунок 15 – Варианты коммутации ключей
Большинство других комбинаций бесполезные или опасные (например, одновременное включение
S1 и S2 вызовет короткое замыкание), поэтому практические схемы обычно содержат элементы защиты.

