 2015-06-05
2015-06-05 1124
1124Абсолютное ускорение. Нормальное ускорение. Касательное (тангенциальное) ускорение. Выбор масштаба ускорений. Теорема подобия планов ускорений.
Перейдем к построению плана ускорений.
Т.к. звено 1 движется равномерно, то ускорение точки А состоит только из нормального ускорения и равно:
 (8.1)
(8.1)
Вектор  направлен по радиус к центру от точки А к т. О. Зададим масштаб μа и вычислим длину [πа], π - это полюс плана ускорения.
направлен по радиус к центру от точки А к т. О. Зададим масштаб μа и вычислим длину [πа], π - это полюс плана ускорения.
 (8.2)
(8.2)
Откладываем отрезок [πа ] и соответствии с направлением вектора  , переходим к группе Ассура.
, переходим к группе Ассура.
Запишем векторные уравнения ускорений для точки В.
 (8.3)
(8.3)
Аналогично, т.к.  , то мы будем рассматирвать только первое уравнение.
, то мы будем рассматирвать только первое уравнение.
Векторы  и
и  раскладываются следующим образом:
раскладываются следующим образом:
 (8.4)
(8.4)
 (8.5)
(8.5)
Перепишем наше уравнение:
 (*)
(*)
Рассмотрим каждый вектор уравнения отдельно:
1.  известен по модулю и направлению
известен по модулю и направлению
 (8.6)
(8.6)
направлен он параллельно звену ВС от точки В к точке С;
2. Вектор  направлен
направлен  к звену ВС, модуль известен; вектор
к звену ВС, модуль известен; вектор  известен по величине и по направлению, отрезок [ pа ] мы уже отложили, вектор
известен по величине и по направлению, отрезок [ pа ] мы уже отложили, вектор  по величине равен:
по величине равен:
 (8.7)
(8.7)
Направлен он параллельно звену АВ от точки В к точке А.
Вектор  направлен ┴ к звену АВ, модуль также неизвестен. Строим дальше план ускорений. Согласно векторному уравнению, из конца вектора
направлен ┴ к звену АВ, модуль также неизвестен. Строим дальше план ускорений. Согласно векторному уравнению, из конца вектора  откладываем в масштабе в указанном направлении, вектор
откладываем в масштабе в указанном направлении, вектор  представляем отрезком [аn],
представляем отрезком [аn],
[ап]= 
 (8.8)
(8.8)
Теперь из конца вектора  проведем линию по направлению вектора
проведем линию по направлению вектора  .
.
Теперь рассмотрим первую часть уравнения (*).
Из полюса P отложим вектор  обозначим этот отрезок [pn']. Из конца этого
обозначим этот отрезок [pn']. Из конца этого
отрезка проведем линию по направлению вектора  . Пересечение направлений векторов
. Пересечение направлений векторов  и
и  дает нам местоположение точки в. Отрезок [ nв ] представляет на чертеже вектор ускорения
дает нам местоположение точки в. Отрезок [ nв ] представляет на чертеже вектор ускорения  , а отрезок [ n΄в' ] представляет на чертеже вектор ускорения
, а отрезок [ n΄в' ] представляет на чертеже вектор ускорения  .
.
Величины этих векторов равны:
 (8.9)
(8.9)
 (8.10)
(8.10)
Определим также угловые ускорения звеньев 2 и 3:
Для определения направления векторв угловых ускорений  2 и 3 перенесем
2 и 3 перенесем  и
и  в точку В механизма. Рассматривая движение В вокруг А в направлении вектора
в точку В механизма. Рассматривая движение В вокруг А в направлении вектора  установим, что 2 направлено притив часовой стрелки. Рассматривая движение В вокруг С в направлении вектора
установим, что 2 направлено притив часовой стрелки. Рассматривая движение В вокруг С в направлении вектора  устанавливаем, что угловое ускорение 3 также направлено против движения.
устанавливаем, что угловое ускорение 3 также направлено против движения.
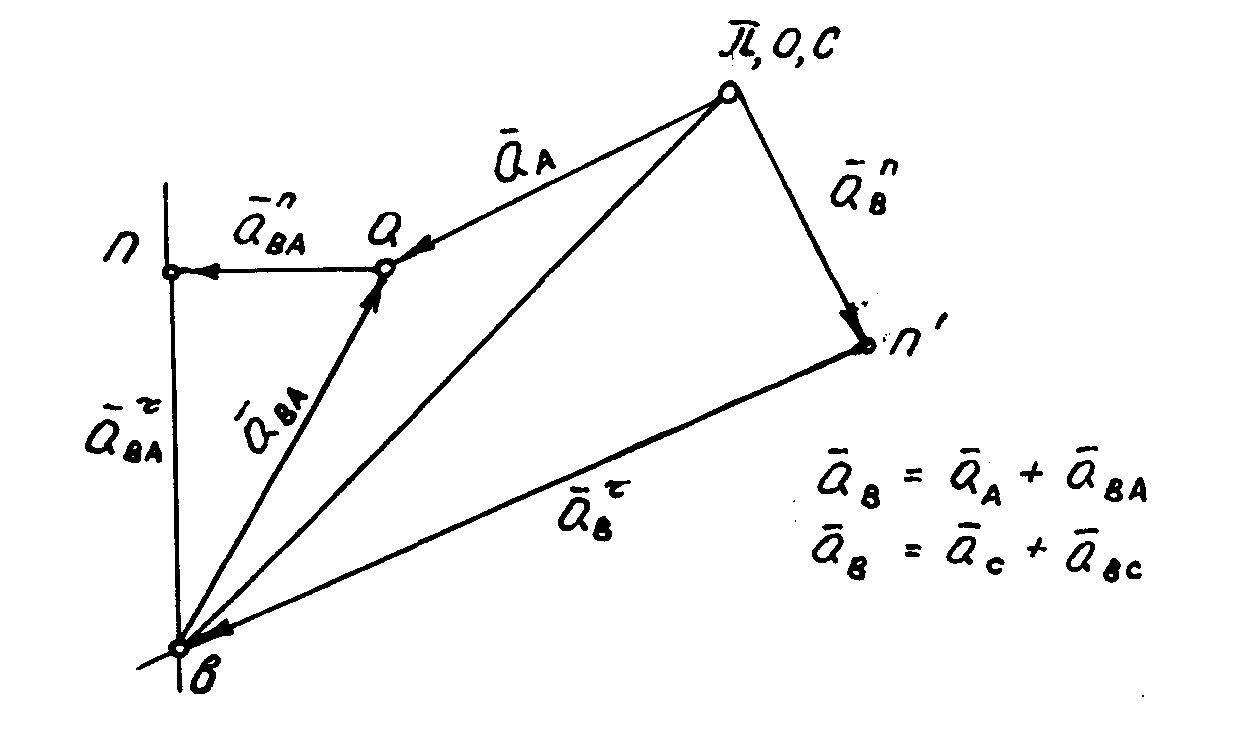
Рисунок 8.1
План ускорений для группы Ассура
Пример: Построить планы скоростей и ускорений для заданного положения кривошипно-шатунного механизма.
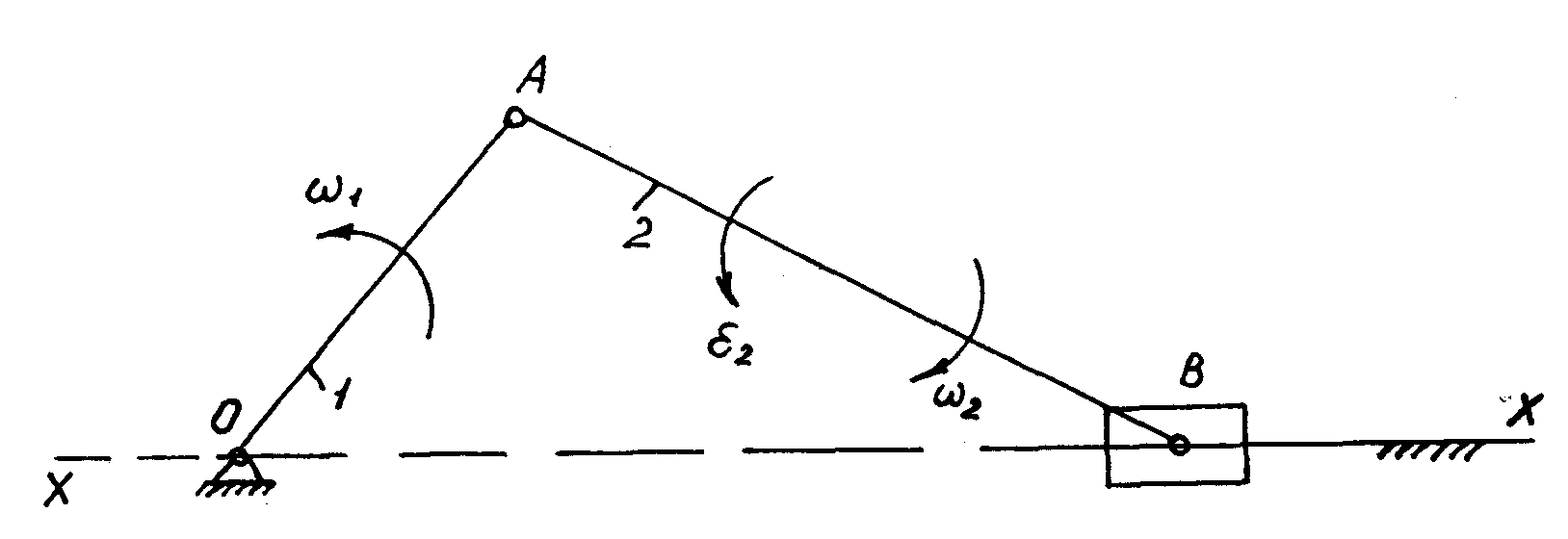
Рисунок 8.2
Дано: lОА=0,2 м n1=300 об/мин= const.
lАВ=0,8 м
lАВ=0,3 м
1.Определим для начала величину угловой скорости первого звена  c-1
c-1
2.Определяем скорость точки А.
 м/сек
м/сек
Направление  ^ ОА в сторону вращения.
^ ОА в сторону вращения.
Зададим масштаб 
и вычислим длину отрезка [ра]
 мм
мм
Откладываем этот отрезок в указанном направлении.
2. Составляем векторное уравнение для точки В. 
Вектор скорости  известен по направлению и по величине
известен по направлению и по величине  ^ АВ, вектор скорости
^ АВ, вектор скорости  направлен по направляющей ползуна XX.
направлен по направляющей ползуна XX.
Теперь согласно векторному уравнению, через конец вектора проведем направление вектора [ра], а через начало вектора  , через точку Р проведем направление вектора
, через точку Р проведем направление вектора 
Отрезок [ав] представляет вектор скорости  .
.
Отрезок [рв] представляет вектор скорости  .
.
Измерим на плане скоростей [ав] = 23 мм, [рв] =26,5 мм.
Вычисляем скорости по модулю.
 м/сек.
м/сек.
 м/сек.
м/сек.
4.Скорость точки S определим по теореме подобия:
 мм
мм
где  – точка на плане скоростей, соответствующая точке S механизма.
– точка на плане скоростей, соответствующая точке S механизма.
Откладываем отрезок  на
на  получим точку , соединив ее с полюсом Р, получим отрезок
получим точку , соединив ее с полюсом Р, получим отрезок  , соответствующий вектору скорости
, соответствующий вектору скорости  .
.
Измерим  мм.
мм.
Таким образом,  м/с
м/с
5.Определим угловую скорость шатуна:
Для определнения направления вектора угловой скорости второго звена  следует вектор
следует вектор  перенести в точку В механизма и проследить, в какую сторону поворачивается звено АВ. Вектор направлен по часовой стрелке.
перенести в точку В механизма и проследить, в какую сторону поворачивается звено АВ. Вектор направлен по часовой стрелке.
6.  м/с2
м/с2
Вектор  направлен по звену ОА от точки А к точке О.
направлен по звену ОА от точки А к точке О.
Зададимся масштабом ускорений
 (м/сек2/мм)
(м/сек2/мм)
Определим величину [πа], ссответствующей вектору  .
.
 мм
мм
Отложим этот отрезок в указанном направлении.
7.Составим векторное уравнение для ускорения точки В для звеньев 2,3
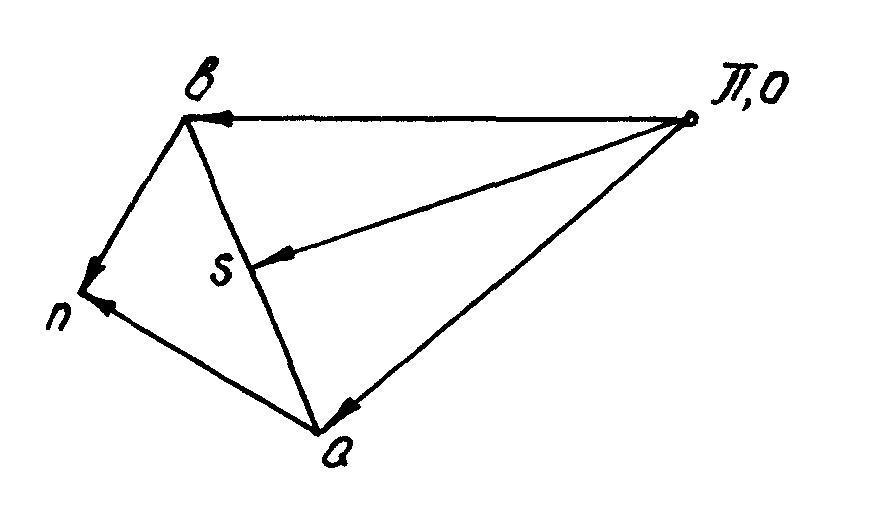
Рисунок 8.3. План ускорений для кривошипно-ползунного механизма
 подставляем:
подставляем:
модуль  равен
равен
 м/с
м/с
определим величину отрезка [аn], изображающего вектор
 мм.
мм.
Векторы в уравнении направлены следующим образом:
мм, где
 ,
,  ,
,  ,
,  .
.
В соответствии с уравнением, с конца вектора  , с точки а проводим вектор
, с точки а проводим вектор  , а через конец вектора
, а через конец вектора  , через точку n проводим направление вектора
, через точку n проводим направление вектора  , через полюс
, через полюс  проводим направление вектора
проводим направление вектора  . Точку пересечения обозначим точкой в. Получим таким образом отрезки
. Точку пересечения обозначим точкой в. Получим таким образом отрезки  и
и  , которые изображают векторы и . Измерим эти отрезки:
, которые изображают векторы и . Измерим эти отрезки:
 мм,
мм,  мм
мм
вычисляем модули:  м/сек
м/сек
 м/сек
м/сек
Соединяя точки а и в, получим вектор полного ускорения  . Измеряем этот отрезок:
. Измеряем этот отрезок:
[ав]= 27,5мм, подставляем:
модуль  м/сек2.
м/сек2.
8. Определим ускорение точки S.
По теореме подобия имеем: 
откуда, [аs]=[аb] 
Отложим этот отрезок на векторе  получим точку S.
получим точку S.
Соединив точку S с полюсом π, получим отрезок πs, изображающий вектор ускорения  . Измерим
. Измерим  мм и вычисляем модуль:
мм и вычисляем модуль:
 м/с2.
м/с2.
9. Находим величину углового ускорения шатуна:
 сек -2 . Для определения направления
сек -2 . Для определения направления  перенесем вектор
перенесем вектор  в точку В на схеме механизма и посмотрим, как движется эта точка в соответствии с направлением
в точку В на схеме механизма и посмотрим, как движется эта точка в соответствии с направлением  относительно точки А.
относительно точки А.
 направлено против часовой стрелки.
направлено против часовой стрелки.
При построении планов ускорений очень важно знать о подобии планов ускорений.
Сформулируем теорему так:
Отрезки прямых линий, соединяющие данные точки на плане звена и отрезка прямых соединяющие концы векторов полных ускорений этих точек на плане ускорений образуют подобные и сходственно расположенные фигуры.
Литература: /1/ гл 6. §32, §33 /2/ гл 2, лекция 6.
1. Как определяется нормальное ускорение?
2. Как определяется касательное ускорение?
3. Определите ускорение при поступательном звене.
4. Как выбирается масштаб ускорений? Размерность масштаба ускорений.
5. Покажите на плане ускорений векторы абсолютных ускорений.
6. Чем отличаются теорема подобия планов скоростей и планов ускорений?








