 2015-06-05
2015-06-05 684
684Звенья плоских механизмов имеют плоскость симметрии, параллельную плоскости движения. Тогда, главный вектор, сил инерции звена (Р) и главный момент сил инерции звена ( ) определяются по формулам:
) определяются по формулам:
1)  - сила инерции (10.1)
- сила инерции (10.1)
 - момент пары сил инерции.
- момент пары сил инерции.
где m - масса звена,
 - вектор ускорения центра масс,
- вектор ускорения центра масс,
 ЈS=0,1ml2 – инерционный момент звена относительно оси проходящей через центр масс ┴ плоскости движения,
ЈS=0,1ml2 – инерционный момент звена относительно оси проходящей через центр масс ┴ плоскости движения,
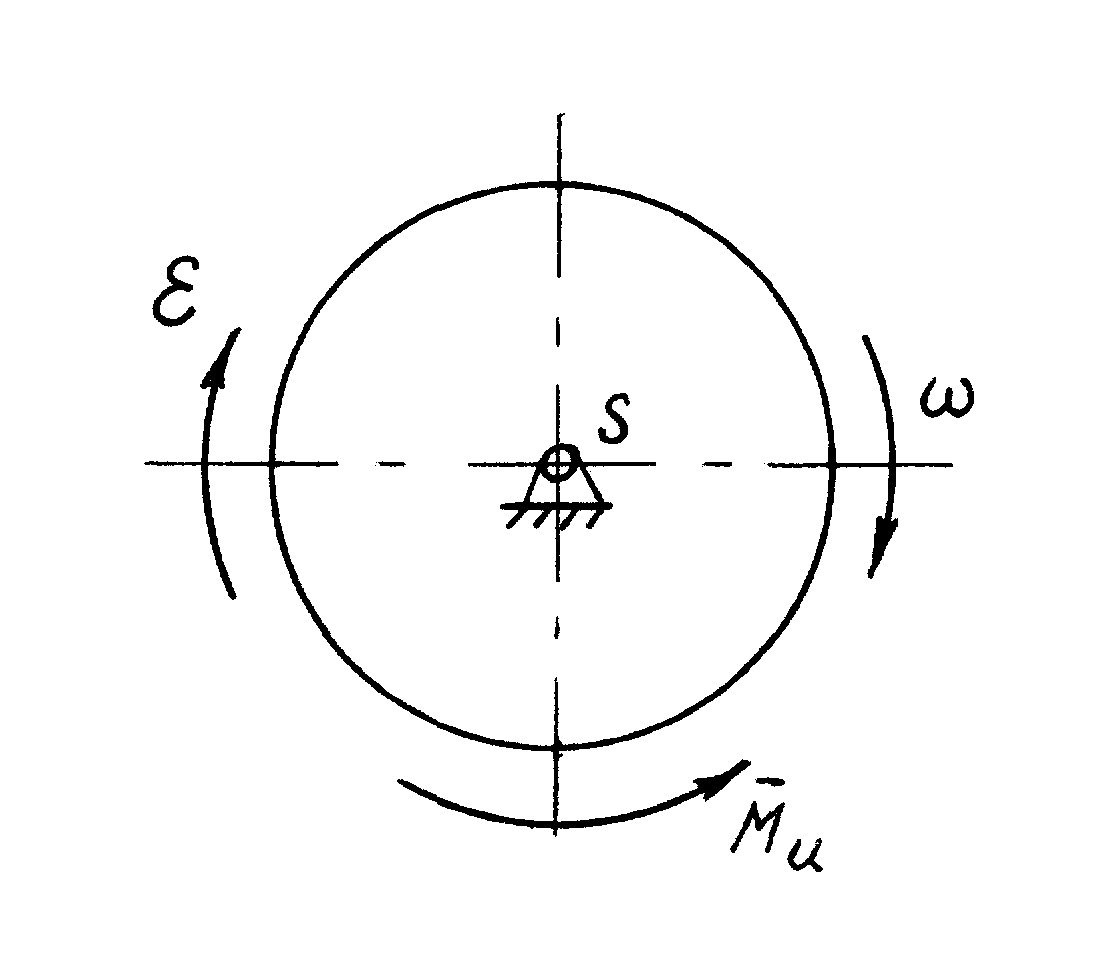
 – угловое ускорение звена. Из формулы (8.1) – можно увидеть, что сила инерции
– угловое ускорение звена. Из формулы (8.1) – можно увидеть, что сила инерции  направлена в противоположную сторону от направления (рис.10.1).
направлена в противоположную сторону от направления (рис.10.1).
Например, дана балка ВС (10.2) Известны ускорения точек В и С, которые находятся на плане ускорений. Соответственно (πв) и (πс). Находим ускорение точки S из плана ускорения
(πs). Ускорение 
Рu (сила инерции) по модулю равна: .
По направлению эта сила противоположна . Момент пары сил  направлен противоположно угловому ускорению .
направлен противоположно угловому ускорению .
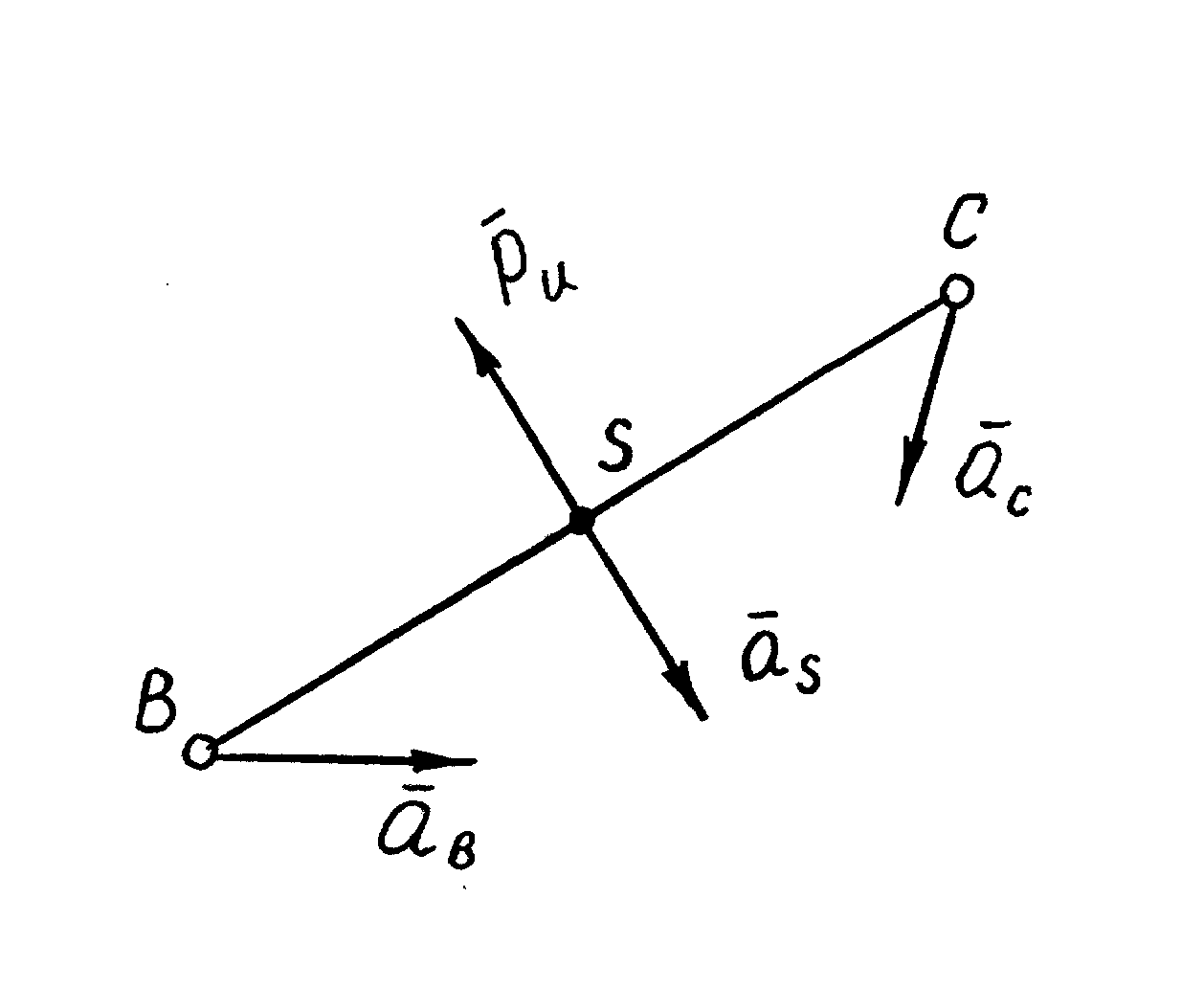 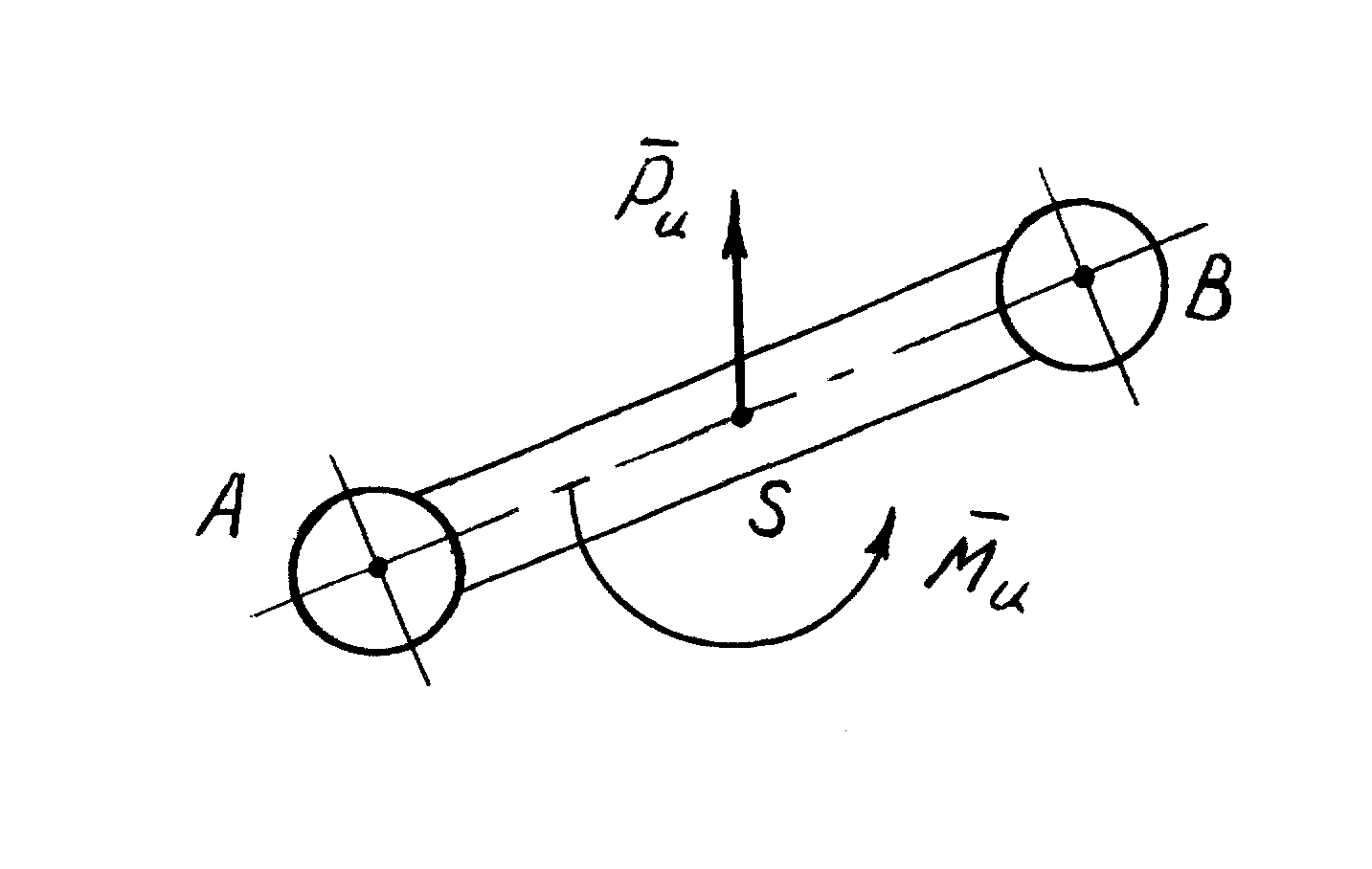 Рисунок 10.1 Рисунок 10.1
|
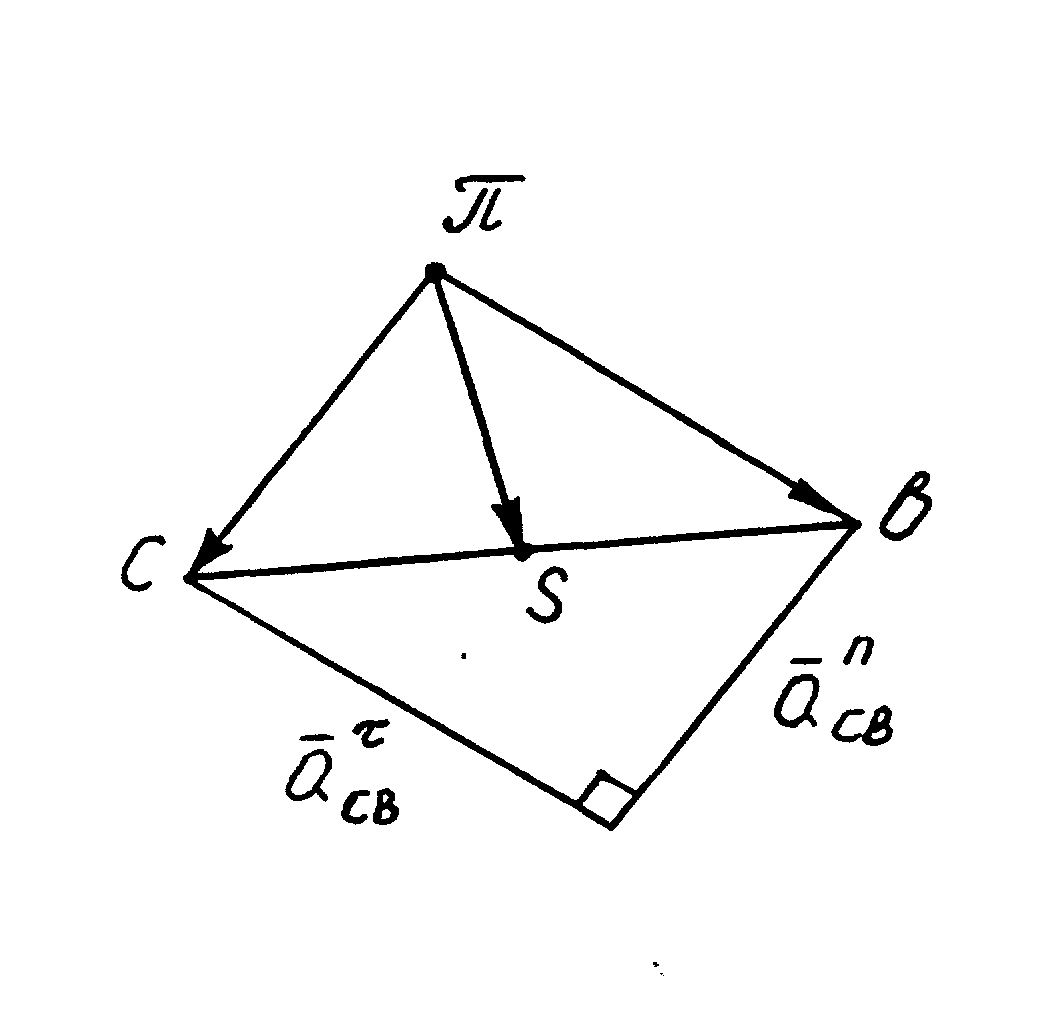
Рисунок 10.2. Рисунок 10.3.
Для определения необходимо знать величину инерционного момента JS, а также величину и направление углового ускорения этого звена.
Размерности JS (кг·м3); (рад/сек2);
 (кг·м2/сек2=Нм);
(кг·м2/сек2=Нм);  (Н)
(Н)
 - тангенциальное ускорение в относительном движении звена,
- тангенциальное ускорение в относительном движении звена,
ℓΒС - длина звена ВС.
Все силы инерции звена в общем случае могут быть сведены к главному вектору сил инерции  , приложенными в центре масс S звена, и главному моменту сил инерции .
, приложенными в центре масс S звена, и главному моменту сил инерции .
Рассмотрим некоторые частные случаи движения звеньев механизма.
1.Поступательное движение:
 , - ускорение центра масс.
, - ускорение центра масс.  .
.
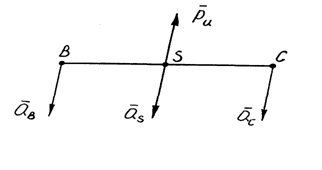
Рисунок 10.4.
2.Вращательное движение: 
 Если
Если  , то .
, то .
Это может иметь место при неравномерном вращении. Если движение равномерное, то  и
и 
3.Силы трения:
Общее сопротивление, возникающее на поверхности двух соприкасающихся тел при относительном скольжении тел, называется силой трения.
Рисунок 10.5
Основной причиной трения скольжения является шероховатость тел, находящихся в соприкасании.
Энергия, затрачиваемая на трение, превращается в теплоту. Одновременно с этим происходит сглаживание шероховатостей соприкасающихся поверхностей, называемое износом.
Трение скольжения /трение 1-го рода/, при котором поверхность одного тела скользит по поверхности другого.
Трение качания /трение 2-го рода/, при котором одна поверхность перекатывается по другой, встречается в высших парах.
Силы трения, появляющиеся на поверхности взаимодействия двух тел, всегда входят попарно, одна из них приложена к одному телу, а другая направленная в обратную сторону, приложена ко второму телу.
Сила трения определяется по формуле:
F ίј =f Pί
где Pίј - величина силы, действующей со стороны звена i на звено j по нормали к трущимся поверхностям, f –коэффициент трения. В абсолютном движении относительно стоики сила трения может быть как силой сопротивления /силой, элементарная работа которой отрицательна/, так и силой движущей /силой, элементарная работа которой положительна/.








