 2015-06-05
2015-06-05 1056
1056Тема: Рычаг Жуковского. Принцип возможных перемещений. Повернутый план скорости. Элементарная работа силы, действующей на звено механизма. Определение Рычага Жуковского. Определение приведенных и уравновешенных сил методом Жуковского.
Рассмотрим определение мощности отдельной силы. Для вычисления pίvіcosαі, необходимо спроектировать vі на направление pί и найти произведение рί vpі =pіvіcosαі (рис.12.1a); здесь vί - проекция скорости на направление соответствующей силы рί.
Произведение pίvίcosαі можно представить еще и как момент силы относительно некоторой точки pν, если вектор скорости откладывать от этой точки повернутым на 90°. Плечом hί силы рί в этом случае будет проекция скорости на перпендикуляр к рί:
hί =v ί cosαі
Если для механизма построен план скоростей, повернутый на 90°, то, найдя скорости точек приложения внешних сил, можно к концам найденных векторов скоростей приложить действующие внешние силы. После этого, рассматривая повернутый план скоростей как жесткий рычаг, вращающийся вокруг полюса рv, можно написать уравнение равновесия рычага в виде суммы моментов сил относительно полюса:
p1h1 + p2h2 + … + pnhn + pyhy = 0 (12.1)
Так как каждый из членов уравнения (12.1) может быть представлен в виде произведения pίvίcosαі, то уравнение равновесия плана скоростей, рассматриваемого как жесткий рычаг, тождественно уравнению мощностей. Из уравнения (12.1) легко определяется уравновешивающая сила рv, приложенная в заданной точке механизма.
Если к звеньям механизма приложены, кроме сил еще и моменты, то каждый из них можно рассматривать как пару сил, составляющая  которой равна (рис. 12.1б):
которой равна (рис. 12.1б):
 (12.2)
(12.2)
где lAB — расстояние в м между точками А и В приложения сил р, образующих пару с моментом М. Найденные силы прикладываются в соответствующих изображающих точках плана скоростей. При наличии моментов Mi можно обойтись и без замены их парой сил, для чегок плану скоростей прикладывают моменты, определяемые уравнением:
 (12.3)
(12.3)
Момент  имеет тот же знак, что и момент Mi, если АВ наплане механизма и
имеет тот же знак, что и момент Mi, если АВ наплане механизма и  на повернутом плане скоростей совпадают по направлению. Если направление противоположно АВ, то моменты и Mi имеют разные знаки. Таким образом, если к звеньям механизма приложены силы и моменты, то уравнение равновесия вспомогательного рычага можно написать в следующем виде:
на повернутом плане скоростей совпадают по направлению. Если направление противоположно АВ, то моменты и Mi имеют разные знаки. Таким образом, если к звеньям механизма приложены силы и моменты, то уравнение равновесия вспомогательного рычага можно написать в следующем виде:
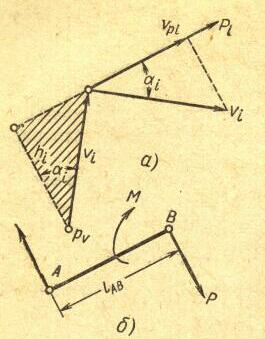 Рисунок12.1. Вспомогательный рычаг Жуковского Рисунок12.1. Вспомогательный рычаг Жуковского |
p1h1 + p2h2 + … + pnhn +  + … +
+ … +  + pyhy = 0 (12.4)
+ pyhy = 0 (12.4)
здесь  - уравновешивающая сила и hy - ее плечо относительно полюса рv. Из уравнения (9.4) уравновешивающая сила:
- уравновешивающая сила и hy - ее плечо относительно полюса рv. Из уравнения (9.4) уравновешивающая сила:
 (12.5)
(12.5)
При определении уравновешивающей силы  можно поворачивать на 90° не план скоростей, а все внешние силы, приложенные к звеньям механизма, при переносе их на план скоростей. При этом все силы должны быть повернуты в одну и ту же сторону.
можно поворачивать на 90° не план скоростей, а все внешние силы, приложенные к звеньям механизма, при переносе их на план скоростей. При этом все силы должны быть повернуты в одну и ту же сторону.
План скоростей с приложенными к нему внешними силами и моментами и рассматриваемый как жесткий рычаг, вращающийся вокруг полюса, получил название вспомогательного рычага Жуковского.
 , (12.6)
, (12.6)
В качестве примера применения вспомогательного рычага Жуковского при определении уравновешивающего момента Му рассмотрим кривошипно-ползунный механизм, к поршню которого приложена сила Рз — равнодействующая давления газов и силы инерции поршня, а к шатуну — сила инерции  и момент сил инерции
и момент сил инерции  (рис. 12.2).
(рис. 12.2).
От произвольного полюса рv откладываем в произвольном масштабе вектор скорости точки А,повернутый на 90°. Скорость точки В:
Проведя линии через а параллельно АВ и через полюс рv перпендикулярно оси цилиндра, получаем в точке b их пересечения конец вектора  . Конец вектора
. Конец вектора  скорости точки S2 находим делением аb на отрезки, пропорциональные AS2 и S2В. План скоростей рассматриваем как жесткий рычаг, вращающийся вокруг рv. Далее переносим силы
скорости точки S2 находим делением аb на отрезки, пропорциональные AS2 и S2В. План скоростей рассматриваем как жесткий рычаг, вращающийся вокруг рv. Далее переносим силы  и
и  на план скоростей, а также находим момент
на план скоростей, а также находим момент  . Так как и АВ противоположны, то
. Так как и АВ противоположны, то  имеет знак, обратный по сравнению со знаком
имеет знак, обратный по сравнению со знаком  .В точке а плана скоростей прикладываем уравновешивающую силу ру. Составляя сумму моментов сил относительно рv,находим:
.В точке а плана скоростей прикладываем уравновешивающую силу ру. Составляя сумму моментов сил относительно рv,находим:

Отсюда:
 ;
;
знак минус перед дробью указывает на то, что момент силы противоположен по знаку сумме моментов всех остальных сил, приложенных к жесткому рычагу.
Уравновешивающий момент Му,приложенный к кривошипу ОА, равен:
Му = руlOA.
Вспомогательный рычаг Жуковского может быть применен не только для определения уравновешивающей силы или момента, но также и в ряде других расчетов. Его можно, например, с успехом использовать для определения усилий, действующих вдоль стержней статически определимых ферм и появляющихся при наличии внешних сил, действующих на ферму.
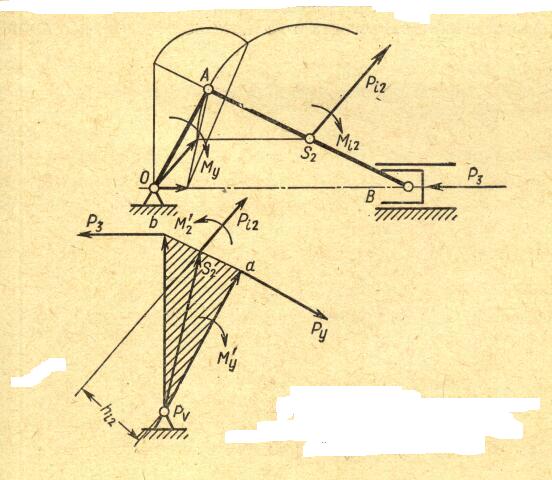
Рисунок 12.2. Рычаг Жуковского для кривошипно-ползунного механизма
Литература: /1/ гл18 §84, §85.
1. В чем заключается прин6цип возможных перемещений?
2. На сколько градусов повернут план скоростей?
3. Что называют рычагом Жуковского?
4. Какие силы называют приведенными?
5. Назовите задачи силового расчета.
6. Какое значение имеют уравновешивающая сила и уравновешивающий момент?








