 2015-06-05
2015-06-05 1964
1964Зубчатая передача в простейшем виде представляет собой трехзвенный механизм с высшей кинематической парой и может рассматриваться как многократная кулачковая передача, предназначенная для сообщения непрерывного вращательного движения с заданным отношением угловых скоростей. Они могут быть созданы также для передачи вращательного движения с паузами (неполные зубчатые колеса).
Если оси зубчатых колес параллельны, то все точки движутся в параллельных плоскостях и колеса образуют плоский механизм. В этом случае зубчатые колеса при постоянном отношении угловых скоростей называются круглыми цилиндрическими или просто круглыми колесами. В некоторых случаях делают зубчатые колеса для воспроизведения изменяющегося по определенному закону отношения угловых скоростей (эллиптические зубчатые колеса, колеса, составленные из дуг логарифмической спирали, и др.), называемые в этом случае некруглыми цилиндрическими колесами.
Цилиндрические зубчатые колеса могут быть построены для передачи вращательного движения как с положительным (внутреннее зацепление), так и с отрицательным (внешнее зацепление) отношением угловых скоростей.
|
|
|
В дальнейшем отношение угловых скоростей зубчатых колес  или
или  будем называть передаточным отношением.
будем называть передаточным отношением.
В некоторых случаях применяют понятие передаточного числа i, под которым подразумевают отношение числа зубьев большого колеса, называемого просто колесом, к числу зубьев малого колеса, называемого часто шестерней.
При работе зубчатых колес зубья одного колеса входят во впадины второго, благодаря чему создается возможность передавать вращательное движение путем непосредственного давления боковой поверхности зуба ведущего колеса на соприкасающуюся с ней боковую поверхность зуба ведомого колеса.
В цилиндрических зубчатых колесах с прямыми зубьями боковая поверхность последних линейчатая и образующие ее параллельны осям колес.
Если боковую поверхность зуба в любом месте пересечь плоскостью, перпендикулярной к оси колеса, то получим линию пересечения, называемую профилем зуба. Профили зубьев зацепляющихся зубчатых колес, воспроизводящих заданное передаточное отношение, должны быть сопряженными, т. е. произвольно заданному профилю одного колеса должен соответствовать вполне определенный профиль второго колеса и, следовательно, профили зубчатых колес должны удовлетворять требованию, т. е. общая нормаль к профилям зубчатых колес в точке κ зацепления делит расстояние между центрами на части, обратно пропорциональные угловым скоростям.
Заданному закону изменения отношения угловых скоростей соответствует вполне определенный закон изменения положения полюса зацепления на линии центров. Это условие дает возможность выбирать кривые, годные для очерчивания профилей зубьев.
|
|
|
Если передаточное отношение постоянно, то единственным требованием, которое нужно предъявить к кривым, очерчивающим профиль П1 и П2 (рис. 14.1), является прохождение нормали к ним в точке κ зацепления, при любом ее положении, через постоянную точку Р на линии центров О1О2. Все кривые, удовлетворяющие этому требованию, могут быть использованы для очерчивания профилей Цилиндрических зубчатых колес. Профиль колеса 2 можно рассматривать как огибающую всех возможных положений профиля зуба колеса 1 и наоборот.
Таким образом, профили зубчатых колес, удовлетворяющие теореме зацепления, должны быть взаимно огибающими кривыми в их относительном движении. На этом основании профили зубчатых колес называют еще сопряженными.
Известно несколько способов профилирования зубчатых колес, основанных на выведенных выше свойствах сопряженных кривых. Однако в современном машиностроении главным образом применяют зубчатые колеса эвольвентного зацепления. Для полной характеристики зацепления следует еще заметить, что теоретически возможное касание правого и левого профилей зуба одного колеса соответствующих профилей, образующих впадину на втором колесе, вносит одну повторяющуюся (пассивную) связь. При одновременном зацеплении двух пар зубьев вносится уже три повторяющиеся связи.
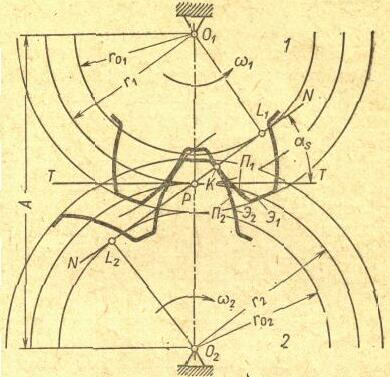 Рисунок 14.1. Цилиндрические зубчатые колеса Рисунок 14.1. Цилиндрические зубчатые колеса |
Для устранения статической неопределимости между зубьями делается зазор. При зацеплении более чем одной пары зубьев статическая неопределимость сохраняется и при наличии зазора.
На основании общих методов кинематики можно показать, что если эвольвенты двух окружностей с неподвижными осями имеют общую касательную, пересекающую линию центров, то они являются взаимно огибающими. Следовательно, они могут быть использованы для профилирования зубьев цилиндрических зубчатых колес.
Допустим, что заданы положения центров О1 и О2 зубчатых колес (рис. 14.1) и отношение угловых скоростей  . Используя
. Используя  , находим полюс зацепления Р. Выбираем окружность радиуса r01, концентрическую начальной окружности радиуса r1 и производим ее развертку. Полученную в результате этого эвольвенту обозначим через Э1. При известном положении колеса можно построить направление нормали в произвольно выбранной на Э1 точке К зацепления; нормаль NN одновременно является касательной к основной окружности радиуса r01.
, находим полюс зацепления Р. Выбираем окружность радиуса r01, концентрическую начальной окружности радиуса r1 и производим ее развертку. Полученную в результате этого эвольвенту обозначим через Э1. При известном положении колеса можно построить направление нормали в произвольно выбранной на Э1 точке К зацепления; нормаль NN одновременно является касательной к основной окружности радиуса r01.
Теперь опустим из центра О2 перпендикуляр О2L2 на нормаль к эвольвенте Э1, проходящую через полюс Р зацепления, и радиусом r02 = О2L2 опишем окружность. Далее строим развертку Э2 круга радиуса r02, проходящую через точку К, т. е. касательную к эвольвенте Э1.
Если эвольвенты Э1 и Э2 будут касаться в полюсе Р, то угол давления α для точки профиля, совпадающей с точкой зацепления, равен углу зацепления. Иначе можно сказать, что угол зацепления равен углу давления для точки эвольвенты, лежащей на начальной окружности. Если движение будет передаваться не правыми профилями, как это показано на рис. 14.1, а левыми, то общая нормаль расположится симметрично относительно линии центров.
Угол зацепления нормализован. Во всех странах для нормальных зубчатых колес принят угол αS= 20°, в то время как раньше наиболее распространено было значение αS= 15°, а в странах с дюймовой системой мер αS =14°30'. Последнее значение α, применялось главным образом из-за удобства расчетов, потому что sin 14°30' = 0,24038» 1/4. Поэтому этот угол легко построить, откладывая при гипотенузе 1" малый катет треугольника, равный 1/4 ".
|
|
|
Между радиусами начальных и соответствующих им основных окружностей существует весьма простое соотношение.
Из треугольников O1L1P и O2L2P (рис. 14.1) имеем
r01 = r1 cos αS, и r02 = r2 cos αS,
т. е. радиусы основных окружностей пропорциональны радиусам начальных окружностей. Отсюда следует, что абсолютное значение передаточного отношения может быть выражено так:
 (14.1)
(14.1)
Одним из достоинств эвольвентного зацепления является то, что правильность работы зубчатых колес не нарушается при неточной их сборке или изменении расстояния между осями.
При изменении расстояния между осями изменится угол зацепления. Если оси раздвинуты, то общая нормаль будет идти круче и угол зацепления увеличится. При сближении колес угол зацепления уменьшается. Значение нового угла зацепления может быть определено из равенства
 (14.2)
(14.2)
Таким образом, при заданных эвольвентных профилях угол зацепления является функцией расстояния между осями, о чем можно судить также по выражению
 (14.3)
(14.3)
и
 (14.4)
(14.4)

