 2015-06-05
2015-06-05 661
6611. По виду задающего сигнала
1.1 Системы автоматической стабилизации
X(t)=const, Y(t)=const
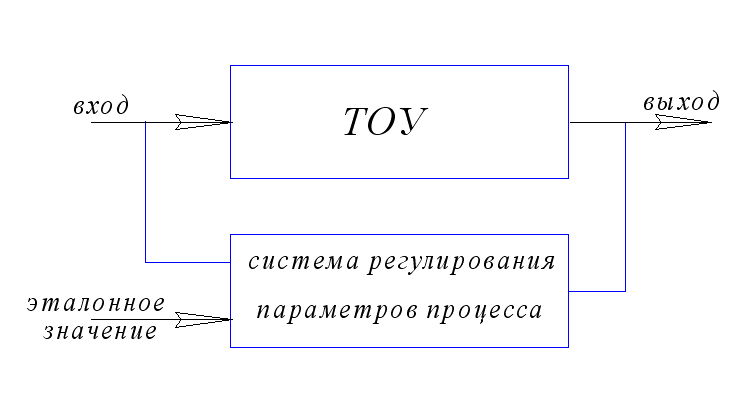
Основная задача – стабилизация параметров на заранее заданном уровне.
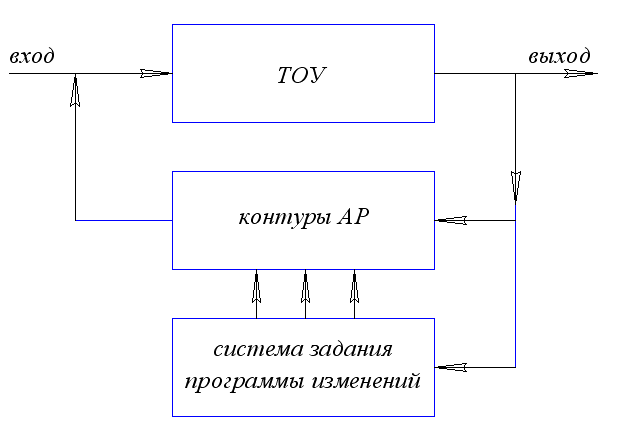
1.2 Системы программного управления
X(t)=Ф(t)
1.3 Следящие системы, изменение задающего сигнала в которых происходит по случайному закону (системы наведения, автопилоты и т.д.).
Программное задание эталонного значения параметров качества.
1.4 Следящие системы, изменение задающего сигнала в которых происходит по случайному закону (системы наведения, автопилоты и т.д.).
АС оптимального управления (достижение экстремума целевой функции)
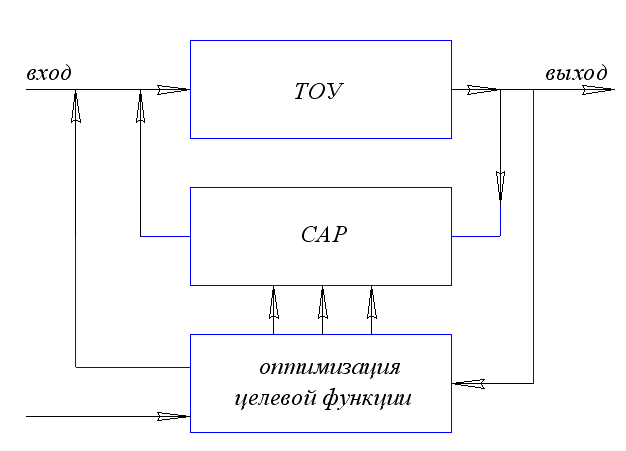
Две задачи:
1. Оптимизация – однократное достижение цели (ТП и Z = const)
не меняет своих свойств
а) математическое описание ТОУ в виде функции цели.
б) ТОУ – «черный ящик» МПЭ
2. ТП (t) и Z(t)
1.5 Экстремальное регулирование – слежение за ускользающим экстремумом
2. По топологии САУ.
2.1 Одноконтурные с одной переменной
2.2 Многоконтурные с одной переменной
2.3 Многоконтурные с несколькими (многомерные)..……..переменными
2.3.1 Многоконтурные несвязанные системы (УУ не связаны между собой вне ОУ).
2.3.2 Многоконтурные зависимые системы (изменение одной переменной ведет к изменению других).
2.3.3 Многоконтурные независимые САУ ----------//---------- не ведет к изменению других.
2.3.4 Многоконтурные связанные системы (УУ связаны вне ОУ).
3. По воздействию УЭ(ИЭ) на РО: прямого и косвенного управления (унитаз)
4. По виду зависимости регулируемой величины от внешнего воздействия.
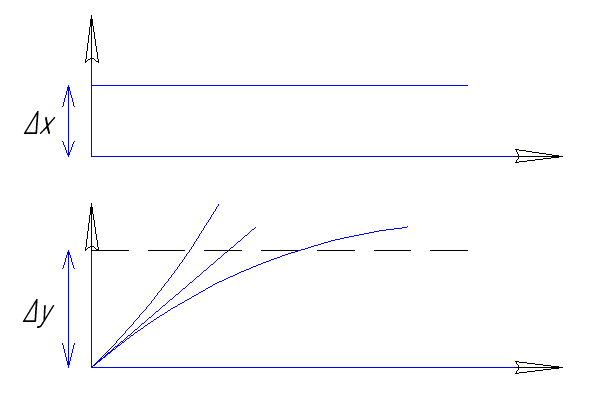
С точки зрения статической устойчивости ТОУ делятся на устойчивые (статические), нейтральные и неустойчивые.
Под устойчивостью понимаются объекты, обладающие способностью приходить в новое равновесное состояние без вмешательства извне после ступенчатого изменения входной величины на  . При этом новое установившееся значение выходной величины объекта отличается от первоначального значения на величину
. При этом новое установившееся значение выходной величины объекта отличается от первоначального значения на величину  (кр.1).
(кр.1).
Такое свойство ТОУ называется самовыравниванием (саморегулированием), а объекты статическими.
 - степень самовыравнивания.
- степень самовыравнивания.
Чем >  , тем <
, тем <  при
при  .
.
У нейтральных или астатических объектов (2) явление самовыравнивания отсутствует. В таких ТОУ после ступенчатого изменения X, изменяется с течением времени линейно, не принимая нового установившегося значения. Скорость изменения  .
.
При  , ТОУ – неустойчив,
, ТОУ – неустойчив, 
4.1 Статические САУ
4.2. Астатические САУ.
При окончании переходного процесса устанавливается значение равное заданному ( ). Х не зависит от f.
). Х не зависит от f.
Определенному значению Y соответствует несколько положений РО; включая астатические звенья.
В астатическом звене в установившемся режиме выходная величина находится в неустойчивом положении равновесия, а при внешнем воздействии выходит из него и Var по определённому функциональному закону.
5. По виду воздействия РО, ИЭ, УУ и ОУ.
5.1. Аналоговые системы (непрерывного управления с у=Ф(Х), где функция непрерывна.
5.2. Дискретные системы (прерывистого) управления g(X), F(g) – дискретна.
5.2.1. Релейные (портовые)
5.2.2. Импульсные: А, Тu, F - функции входной величины.
5.2.3. Цифровые: в контур управления встроены ЦВУ или ЭВМ.
Режим реального времени.
6.По характеру звеньев, включаемых в САУ.
6.1. Линейные САУ, звенья, которых имеют характеристики вида Y=a+kX.
Y и X линейно связаны между собой в статическом и динамическом режимах работы.
Описаны линейными дифференциальными уравнением
6.1.1. Обыкновенные описаны обыкновенными дифференциальными уравнениями (вход – выход).
6.1.2. С распределенными параметрами
Уравнения в частных производных
Например: 
6.1.3. Системы с запаздыванием
6.1.4. Системы с переменными параметрами коэффициентов и матрицы коэффициентов в уравнениях зависимы от времени.
6.1.5. Импульсные и цифровые системы, описываемые уравнениями в конечных разностях.
6.2. Нелинейные системы.
Звенья с нелинейными характеристиками.
 ,
,  и т.д.
и т.д.
где F – нелинейная функция.








