 2015-06-05
2015-06-05 3616
3616Электродвигатель постоянного тока состоит из неподвижной части
(индуктора) с электромагнитами, на полюсах которых расположена обмот-ка возбуждения, и вращающегося якоря, обмотка которого соединена с коллектором. При подведении напряжения постоянного тока через коллек-тор к обмотке якоря одновременно подается напряжение и в обмотку возбуждения электромагнитов. При этом в магнитной системе индуктора возникает магнитный поток, взаимодействие которого с магнитным полем якоря приводит к образованию вращающегося момента, вызывающего вращения якоря.
В зависимости от принятой схемы питания обмоток возбуждения машины постоянного тока подразделяются:
- на двигатели с последовательным возбуждением;
- на двигатели с параллельным возбуждении
- на двигатели со смешанным возбуждением.
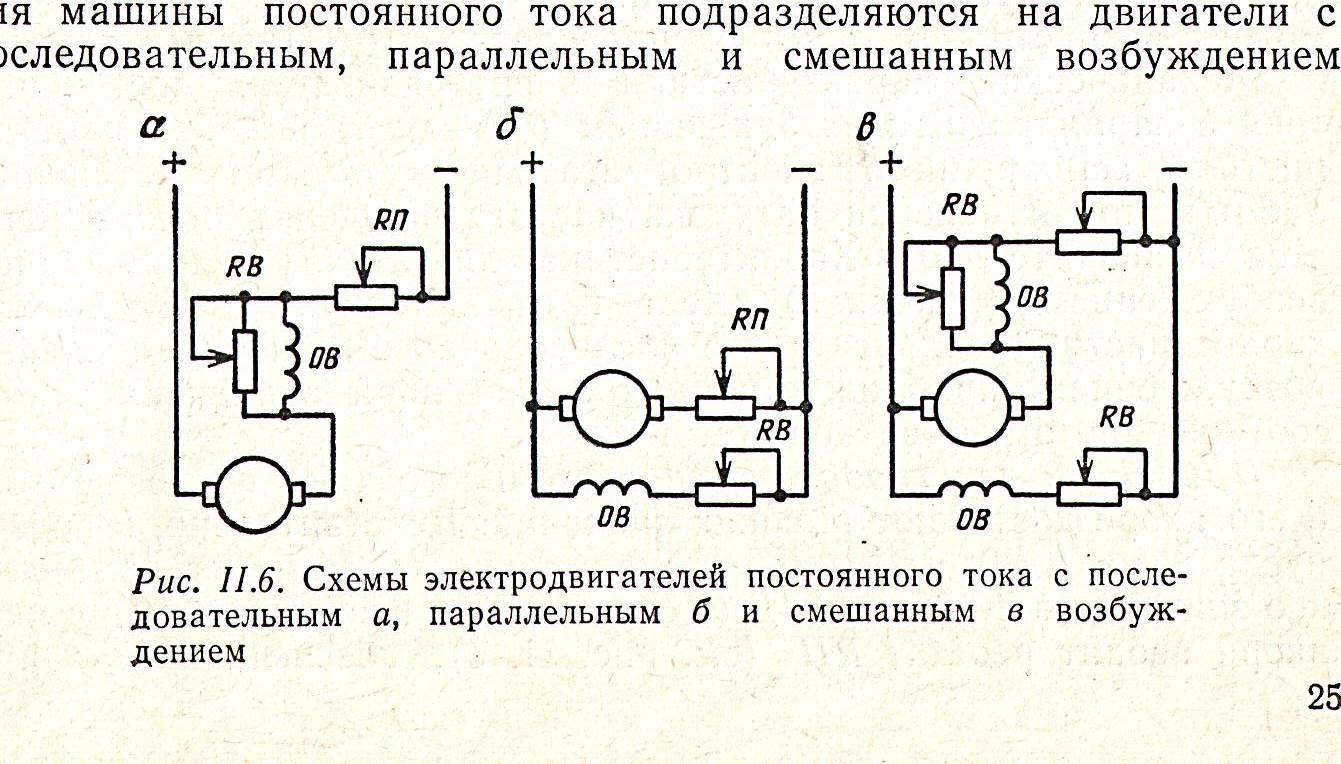 Схемы электродвигателей постоянного тока:
Схемы электродвигателей постоянного тока:
а - с последовательным возбуждением;
б – с параллельным возбуждением;
с – со смешанным возбуждением.
ОВ – обмотка возбуждения; RП – реостат пусковой; RВ – реостат возбуждения.
Рабочие параметры электродвигателей постоянного тока регулируются при помощи реостатов (RП и RВ) в цепи ротора и в цепи возбуждения ОВ. Подводимое к электродвигателю постоянного тока напряжение U урав-новешивается с индуцируемой в машине ЭДС Е и с падением напряжения в цепи якоря на его сопротивление R при прохождении тока I
Индуцируемая в якоре ЭДС
Где С – коэффициент пропорциональности, зависящий от конструкции машины; Ф – магнитный поток, Вб; n – частота вращения якоря.
Механическая мощность развиваемая машиной Р
 E∙I, Вт
E∙I, Вт
Вращающий момент (Н∙м)
М=С∙Ф∙I
Откуда
I= 
И
n= 
Это уравнение является уравнением механической характеристики электродвигателя постоянного тока.
Механические характеристики электродвигателей постоянного тока с различным возбуждением имеют различную форму.
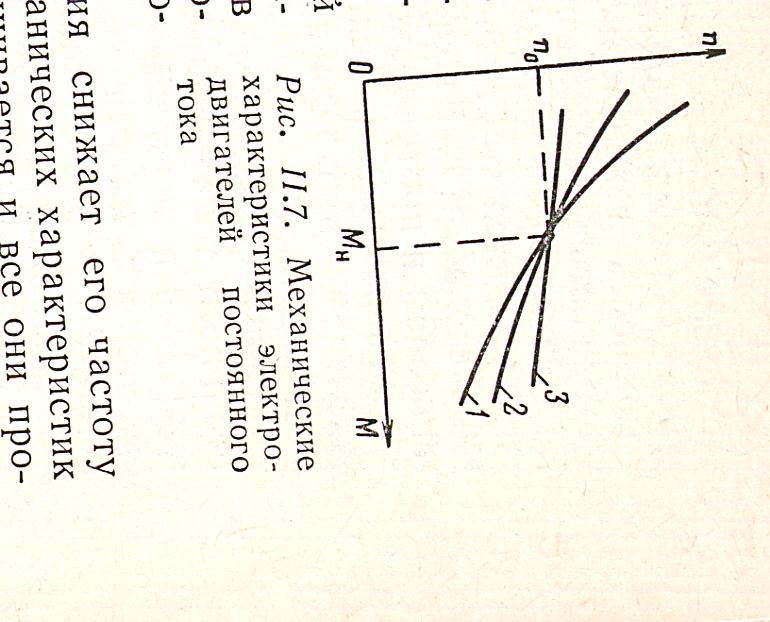
Рис. Механические характеристики электродвигателей постоянного тока:
1 – с последовательным возбуждением;
2 – со смешанным возбуждением;
3 – с параллельным возбуждением
Частота вращения якоря двигателя с последовательным возбуждением (кривая 1) резко изменяется с изменением нагрузки.
Двигатель может преодолеть большой момент сопротивления при сильном снижении частоты вращения и наоборот, при резком снижении нагрузки частота вращения может возрасти до опасных пределов (воз-можность разноса).
Механическая характеристика двигателя постоянного тока с параллельным возбуждением ( кривая 3) подобна характеристике асинх-ронного двигателя в области устойчивой работы: при изменении нагрузки частота вращения ротора меняется незначительно.
Характеристика двигателя со смешанным возбуждением (кривая 2) имеет промежуточную форму между вышеуказанными харак-теристиками, приближаясь к той или иной в зависимости от соотношения ампер-витков обмоток.
При пуске электродвигателя пусковые токи достигают высоких значений.
В период пуска n=0; E=0; I= U/R максимально (превышает номинальное значение в 8 – 15 раз). Для ограничения пусковых токов в цепь якоря вводят реостат RП, обеспечивающий превышение пускового тока над номинальным не более чем в 2 раза. В период пуска реостат в цепи якоря должен быть введен, а в цепи возбуждения реостат RП – выведен, при последовательном возбуждении – введен. При этих условиях пусковой ток имеет минимальное значение. По мере разгона пусковой реостат выводится из цепи.
Частоту вращения электродвигателей постоянного тока можно регулировать тремя способами:
- изменением сопротивления в цепи якоря R;
- изменением магнитного потока;
- изменением величины подводимого напряжения.
Введение в цепь якоря сопротивления снижает его частоту вращения. При этом наклон кривых (механических характеристик двигателя) с ростом сопротивления увеличиваются и все они проходят ниже естественной характеристики. Но при таком способе проиходит значительная потеря энергии в реостате, значительное смягчение характеристик и необходимость иметь громоздкий реостат.
Частоту вращения можно регулировать с помощью специальных устройств, позволяющих изменять напряжение в якоре в необходимых пределах. К таким устройствам относятся система генератор – двигатель (Г –Д) или управляемые выпрямители, выполняемые на базе различных элементов.
Электрическое торможение двигателей постоянного тока произ-водится теми же способами, что торможение синхронных двигателей, т.е. возвратом энергии в сеть, электродинамическим способом и противо-током.
Реверсирование двигателей достигается изменением полярности питающих проводов на клеммах обмотки якоря или обмотки воз-буждения.
Преимущества двигателей постоянного тока. Возможность плавного регулирования частоты вращения в широком диапазоне.
Недостатки двигателей постоянного тока. Необходимость иметь преобразовательные устройства, более сложная конструкция по сравнению с асинхронным двигателем, меньшая надежность в работе и меньший К.П.Д.

