 2018-01-21
2018-01-21 17205
17205Схемавключения обмоток. Двигатели смешанного возбуждения имеют две обмотки – параллельную и последовательную, намотанные на одни и те же полюсы.
Электрическая схема двигателя показана на рис. 1.33. В зависимости от числа витков обмоток и протекающего по ним тока соотношение между МДС параллельной ОВ1 и последовательной ОВ2обмотками может быть различным. Кроме того, обмотки могут быть включены согласно или встречно. Чаще всего в практике встречаются двигатели с преобладанием МДС параллельной обмотки или согласном включении обмоток.
Механическаяхарактеристика. Механическая характеристика (рис. 1.34, кривая 3) располагается между характеристиками двигателя с параллельным возбуждением 1 и двигателя с последовательным возбуждением 2. Такая характеристика позволяет получить значительный пусковой момент и исключает возможность «разноса» двигателя при холостом ходе. Регулирование частоты вращения двигателя смешанного возбуждения аналогично регулированию скорости двигателя параллельного возбуждения. Варьируя МДС обмоток возбуждения, можно получить почти любую промежуточную механическую характеристику.
Приведенные особенности двигателя смешанного возбуждения определяют его использование для приводов компрессоров, строгальных станков, подъемников, в электрической тяге и т. д.
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
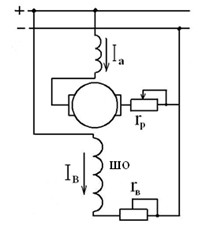
Рис. 1 — Схема электродвигателя смешанного возбуждения
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (Ia) при U=Uн и Iв=const (здесь Iв — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).
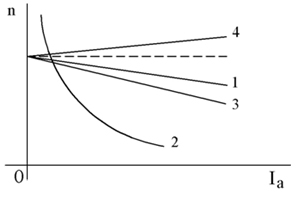
Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=Uн и Iв=const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
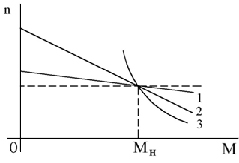
Рис. 3 — Механические характеристики двигателя смешанного возбуждения
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.
26) Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(Mн) и n = f2 (Iя) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
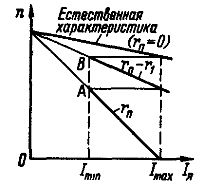
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
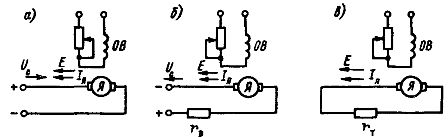
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc< Е, а также при спуске грузов в подъемнике и в других случаях.
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.
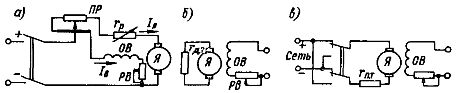
Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
27) 
В двигателях параллельного возбуждения при неизменном токе в обмотке возбуждения (IВ = const) магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять Ф = const. В этом случае электромагнитный момент [см. (25.24)] пропорционален току в цепи якоря и механическая характеристика n = f(M) может быть представлена зависимостью n = f(Ia) (рис. 29.8). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря Ia0небольшой. При этом частота вращения n = n0(точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС Ea = 0 и ток двигателя достигает значения 
Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.
 .
.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря  (штриховая прямая).
(штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС Eaначнут возрастать. Когда ЭДС Ea = U, машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого пограничной частотой вращения nxx
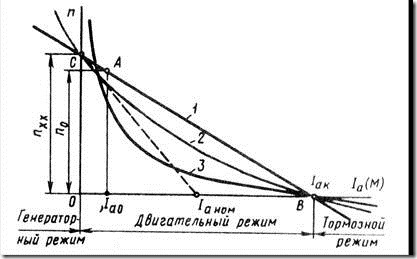
Рис. 29.8. Режимы работы машины постоянного тока:
1 — с параллельным (независимым) возбуждением;
2 — со смешанным возбуждением;
3 — с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС Eaстанет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
28) Способы регулирования частоты вращения. Частота вращения двигателя постоянного тока
(8.107)
п = [ U - Iа (Σ Rа + R до6)]/(се Ф).
Следовательно, ее можно регулировать тремя способами: 1) включением добавочного реостата R доб в цепь обмотки якоря; 2) изменением магнитного потока Ф; 3) изменением питающего напряжения U.
На примере двигателя с параллельным возбуждением рассмотрим принципиальные особенности, свойственные этим способам регулирования.
Включение реостата в цепь якоря. При включении реостата в цепь якоря частота вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата:
(8.108)
| n = | U - Ia(∑Ra + Rдоб) | = | U | - | Ia(∑Ra + Rдоб) | = n0 - Δ n. |
| ceФ | ceФ | ceФ |
Это показано на рис. 8.66, где приведены скоростные и механические характеристики двигателя с параллельным возбуждением: 1 — естественная (при R доб = 0); 2 — реостатная (при R доб > 0). Частоты вращения при холостом ходе для обеих характеристик равны, значения A n(уменьшение частоты вращения при нагрузке) различны. При одном и том же токе якоря Δ n ест /Δ n реост = Σ R a /(Σ R a + R доб). Чем больше добавочное сопротивление R доб, тем круче с увеличением нагрузки падает частота вращения.
Механические характеристики n = f(M) двигателя с параллельным возбуждением можно получить из скоростных характеристик n = f(Ia) путем изменения масштаба по оси абсцисс, так как для двигателя этого типа М = сМФIa = cIa (момент пропорционален току якоря).
Основным недостатком данного метода регулирования является возникновение больших потерь энергии в реостате (особенно при низких частотах вращения), что видно из соотношения
(8.109)
Δ п / п 0 = Ia (Σ Ra + R доб)/ U = Ia 2(Σ Ra + R доб)/(UIa) = Δ Р эл / Р 1,
где Δ Р эл — электрические потери в цепи якоря; Р 1 — мощность, подведенная к якорю.
 |
| Рис. 8.66. Скоростные и механические характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем включения реостата в цепь якоря |
Решая уравнение (8.109) относительно Δ Р эл , получаем
(8.110)
Δ Р эл = Р 1Δ п / п 0 = Р 1 (п 0 - п)/ п 0,
т.е. с уменьшением частоты вращения якоря потери линейно возрастают.
Очевидно, что данный способ позволяет только уменьшать частоту вращения (по сравнению с частотой при естественной характеристике). Иногда существенным является то обстоятельство, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими (мягкими), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения.
Изменение магнитного потока. Чтобы изменить магнитный поток, необходимо регулировать ток возбуждения двигателя. При различных магнитных потоках Ф1 и Ф2 частота вращения определяется формулами
(8.111)
| } |
В двигателе с параллельным возбуждением, например, частота вращения при холостом ходе и падение частоты вращения изменяются обратно пропорционально изменению магнитного потока:
(8.112)
п 02/ п 01 = Δ п 2/Δ п 1 = Ф1/Ф2.
Таким образом, скоростные характеристики 1 и 2 двигателя при различных магнитных потоках Ф1 и Ф2 не являются параллельными (рис. 8.67, а). Эти характеристики пересекаются в точке А при частоте вращения, равной нулю, так как в данном случае ток I ак не зависит от потока:
(8.113)
Iа к = U /Σ Ra
и определяется значениями напряжения и сопротивления цепи якоря. Значение тока I ак при n = 0 называют током короткого замыкания.
Механические характеристики для двигателя с параллельным возбуждением строят на основании следующих соображений. Каждая из механических характеристик является практически линейной (если пренебречь реакцией якоря) и может быть построена по двум точкам: точке холостого хода, в которой момент равен нулю, и точке короткого замыкания, в которой момент максимален.
 | Рис. 8.67. Скоростные и механические характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока |
Сравнивая моменты при коротком замыкании, соответствующие различным значениям магнитного потока, получаем
(8.114)
М к1/ М к2 = сМ Ф1 Iа к /(сМ Ф2 Iа к) = Ф1/Ф2.
Таким образом, с уменьшением магнитного потока частота вращения при холостом ходе возрастает, а момент при коротком замыкании снижается. Следовательно, механические характеристики, построенные при различных значениях магнитного потока, пересекаются при некотором значении момента М кр и частоте вращения, меньшей частоты вращения при холостом ходе, но большей нуля (рис. 8.67, б). Из рассмотрения механических характеристик видно, что при значениях нагрузочного момента, меньших М кр, уменьшение потока ведет к увеличению частоты вращения (см. точки С 1 и С 2 при нагрузочном моменте M н1). При значениях нагрузочного момента, больших М кр, уменьшение потока приводит к уменьшению частоты вращения (см. точки С '1 и С '2 при нагрузочном моменте M н2).
В двигателях параллельного возбуждения средней и большой мощности уменьшение потока используют для повышения частоты вращения (рис. 8.68, а). В микродвигателях, наоборот, магнитный поток уменьшают для снижения частоты вращения.
Аналогично располагаются и механические характеристики у двигателей с последовательным возбуждением; в двигателях большой и средней мощности при уменьшении магнитного потока частота вращения возрастает рис. 8.68, б).
Уменьшение магнитного потока в двигателях последовательного возбуждения осуществляют путем включения регулировочного реостата R p.в параллельно обмотке возбуждения ОВ (рис. 8.69), вследствие чего ток возбуждения
(8.115)
I в = Iа R p.в /(R в + R p.в) = β Iа,
где R p.в — сопротивление регулировочного реостата, включенного параллельно обмотке возбуждения; β = I в/ Iа — коэффициент регулирования возбуждения.
 |
| Рис. 8.68. Механические характеристики двигателей: 1 — при нормальном возбуждении; 2 — при уменьшении магнитного потока |
При включении реостата R p.в параллельно обмотке возбуждения требуемое распределение тока I а между обмоткой и реостатом обеспечивается только при стационарном режиме. При переходных процессах, когда токи I а и I в изменяются, в обмотке возбуждения возникает значительная ЭДС самоиндукции, под действием которой ток I в уменьшается по сравнению с его значением при стационарном режиме, а ток I р.ввозрастает, т. е. происходит значительное ослабление возбуждения. Наиболее опасен этот режим для двигателей электрифицированного транспорта (электровозов, электропоездов, трамваев, троллейбусов). При отключении двигателя от сети и последующем включении (при отрыве токоприемника от контактного провода) в первый момент почти весь ток Iа идет по реостату R p.в, a ток Iв весьма мал. Это приводит к значительному возрастанию тока Iа из-за резкого уменьшения ЭДС Е, индуцированной в обмотке якоря. Практически при этих условиях возникает резкий бросок тока Iа, сопровождающийся нарушением нормальной коммутации и образованием кругового огня.
 |
| Рис. 8.69. Схема включения регулировочного реостата в двигателе с последовательным возбуждением |
Чтобы обеспечить при переходных процессах такое же распределение тока Iа между обмоткой возбуждения и реостатом R p.в, как и при стационарном режиме, последовательно с реостатом включают индуктивный шунт ИШ (катушку с ферромагнитным сердечником). Индуктивность его выбирают так, чтобы отношение индуктивностей реостата и обмотки возбуждения было приблизительно равно отношению их сопротивлений.
Рассмотренный способ регулирования весьма прост и экономичен, поэтому его широко применяют на практике. Однако при этом регулирование частоты вращения можно осуществить только в сравнительно небольшом диапазоне; обычно n max/ n min = 2 ÷ 5. Нижний предел n min ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток. Верхний предел n max определяется условиями устойчивости (при сильном уменьшении Ф двигатель идет в «разнос»), а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и возрастает реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. Поэтому двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, должны иметь компенсационную обмотку и пониженное значение реактивной ЭДС при номинальном режиме.
Изменение питающего напряжения на зажимах якоря. При изменении питающего напряжения от U 1 до U 2 частоты вращения определяются соответственно формулами
(8.116)
п 1 = (U 1 - Ia Σ Ra )/(се Ф) = U 1/(ce Ф)- Ia Σ Ra /(се Ф) = п 01 - Δ п 1;
(8.117)
п 2 = (U 2 - Ia Σ Ra)/(се Ф) = U 2/(ce Ф) - Ia Σ Ra /(се Ф) = п 02 - Δ п 2.
В двигателе с параллельным возбуждением частота вращения при холостом ходе изменяется пропорционально изменению напряжения, т. е. n 02/ n 01 = U2/U1, а уменьшение частоты вращения, обусловленное воздействием нагрузки, при М н = const остается неизменным: Δ n 1 = Δ n 2 = const. В связи с этим скоростные характеристики двигателя с параллельным возбуждением представляют собой семейство параллельных прямых 1, 2 и 3 (рис. 8.70, а). Механические характеристики n = f(M) получаются из скоростных путем изменения масштаба оси абсцисс, так как момент пропорционален току якоря.
 | Рис. 8.70. Скоростные и механические характеристики двигателей при регулировании частоты вращения путем изменения напряжения на зажимах якоря |
Скоростные и механические характеристики двигателя с последовательным возбуждением строят аналогично (рис. 8.70, б). Регулирование частоты вращения двигателя путем изменения напряжения на зажимах якоря обычно ведут «вниз», т. е. уменьшают напряжение и частоту вращения по сравнению с номинальными.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Как следует из (8.84), это можно осуществить двумя способами: путем изменения направления тока I ав обмотке якоря или изменения направления магнитного потока Ф, т. е. тока возбуждения. Для этого переключают провода, подводящие ток к обмотке якоря или обмотке возбуждения.
29) Устройство и принцип работы трансформатора
Схема однофазного двухобмоточного трансформатора представлена ниже. 
На схеме изображены основные части: ферромагнитный сердечник, две обмотки на сердечнике. Первая обмотка и все величины которые к ней относятся (i1-ток, u1-напряжение, n1-число витков,Ф1 – магнитный поток) называют первичными, вторую обмотку и соответствующие величины - вторичными.
Первичную обмотку включают в сеть с переменным напряжением, её намагничивающая сила i1n1 создает в магнитопроводе переменный магнитный поток Ф, который сцеплен с обеими обмотками и в них индуцирует ЭДС e1= -n1dФ/dt, e2= -n2dФ/dt. При синусоидальном изменении магнитного потока Ф = Фm sinωt, ЭДС равно e = Em sin (ωt-π/2). Для того чтобы посчитать действующее значение ЭДС нужно воспользоваться формулой E=4.44 f n Фm, где f- циклическая частота, n – количество витков, Фm – амплитуда магнитного потока. Причем если вы хотите посчитать величину ЭДС в какой либо из обмоток, нужно вместо n подставить число витков в данной обмотке.
Из приведенных выше формул можно сделать вывод о том, что ЭДС отстает от магнитного потока на четверть периода и отношение ЭДС в обмотках трансформатора равно отношению чисел витков E1/E2=n1/n2.
Если вторая обмотка не находится под нагрузкой, значит трансформатор находится в режиме холостого хода. В этом случае i2 = 0, а u2=E2, ток i1 мал и мало падение напряжения в первичной обмотке, поэтому u1≈E1 и отношение ЭДС можно заменить отношением напряжений u1/u2 = n1/n2 = E1/E2 = k. Из этого можно сделать вывод, что вторичное напряжение может быть меньше или больше первичного, в зависимости от отношения чисел витков обмоток. Отношение первичного напряжения ко вторичному при холостом ходе трансформатора называется коэффициентом трансформации k.
Как только вторичная обмотка подключается к нагрузке, в цепи возникает ток i2, то есть совершается передача энергии от трансформатора, который получает ее из сети, к нагрузке. Передача энергии в самом трансформаторе происходит благодаря магнитному потоку Ф.
Обычно мощность на выходе и мощность на входе приблизительно равны, так как трансформаторы являются электрическими машинами с довольно высоким КПД, но если требуется произвести более точный расчет, то КПД находиться как отношение активной мощности на выходе к активной мощности на входе η = P2/P1.
Магнитопровод трансформатора представляет собой закрытый сердечник собранный из листов электротехнической стали толщиной 0,5 или 0,35мм. Перед сборкой листы с обеих сторон изолируют лаком.
По типу конструкции различают стержневой (Г-образный) и броневой (Ш-образный) магнитопроводы. Рассмотрим их структуру.
Стержневой трансформатор состоит из двух стержней, на которых находятся обмотки и ярма, которое соединяет стержни, собственно, поэтому он и получил свое название. Трансформаторы этого типа применяются значительно чаще, чем броневые трансформаторы.

Броневой трансформатор представляет собой ярмо внутри которого заключается стержень с обмоткой. Ярмо как бы защищает стержень, поэтому трансформатор называется броневым.
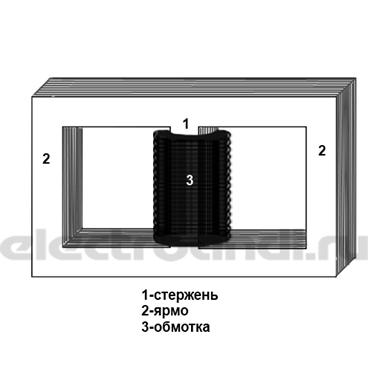
Обмотка
Конструкция обмоток, их изоляция и способы крепления на стержнях зависят от мощности трансформатора. Для их изготовления применяют медные провода круглого и прямоугольного сечения, изолированные хлопчатобумажной пряжей или кабельной бумагой. Обмотки должны быть прочными, эластичными, иметь малые потери энергии и быть простыми и недорогими в изготовлении.
Охлаждение
В обмотке и сердечнике трансформатора наблюдаются потери энергии, в результате которых выделяется тепло. В связи с этим трансформатору требуется охлаждение. Некоторые маломощные трансформаторы отдают свое тепло в окружающую среду, при этом температура установившегося режима не влияет на работу трансформатора. Такие трансформаторы называют “сухими”, т.е. с естественным воздушным охлаждением. Но при средних и больших мощностях, воздушное охлаждение не справляется, вместо него применяют жидкостное, а точнее масляное. В таких трансформаторах обмотка и магнитопровод помещены в бак с трансформаторным маслом, которое усиливает электрическую изоляцию обмоток от магнитопровода и одновременно служит для их охлаждения. Масло принимает теплоту от обмоток и магнитопровода и отдает ее стенкам бака, с которых тепло рассеивается в окружающую среду. При этом слои масла имеющие разницу в температуре циркулируют, что улучшает теплообмен. Трансформаторам с мощностью до 20-30 кВА хватает охлаждения бака с гладкими стенками, но при больших мощностях устанавливаются баки с гофрированными стенками. Также нужно учитывать что при нагреве масло имеет свойство увеличиваться в объеме, поэтому в высокомощных трансформаторах устанавливают резервные баки и выхлопные трубы (в случае если масло закипит, появятся пары которым нужен выход). В трансформаторах меньшей мощности ограничиваются тем, что масло не заливают до самой крышки.
Читайте также - Приведение обмоток трансформатора

