 2015-06-04
2015-06-04 7541
7541На рис. 54 показана кинематическая схема типового электрического брашпиля судов внутреннего плавания. В брашпиле применен червячно-цилиндрический редуктор. Червяк приводится электродвигателем 16, прикрепленным фланцем к редуктору, с помощью длинного валика 13, расположенного в нижней части редуктора. Грузовой вал 8, размещенный над ведущим валом редуктора, приводится колесом 5, зацепляющимся с шестерней 6, сидящей на одном валу с червячным колесом 7. На грузовом валу сидят свободно две цепные звездочки 3 и 10 и жестко насажены турачки 1 и 11. Сцепление звездочек с грузовым валом осуществляется с помощью кулачковых муфт 4 и 9, а торможение с помощью ленточных тормозов 2 и 12. Электродвигатель снабжен пристроенным дисковым тормозом 17. Для ручного привода предусмотрена колонка 18 с рукояткой, оканчивающаяся конической шестерней 14, зацепляющейся с насаженной на ведущий вал шестерней 15. Колонка обычно располагается в вертикальной плоскости и может быть съемной.
Брашпиль обеспечивает раздельную работу звездочек левого и правого бортов. Отдача якоря осуществляется дистанционно. При помощи турачек совершаются швартовные операции. Швартовные барабаны сидят на валу жестко и всегда вращаются при включенном двигателе.
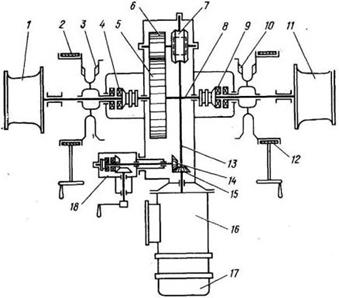 |  |
| Рисунок 54 – Электроручной брашпиль |








