 2015-06-28
2015-06-28 3303
3303Одно из самых перспективных направлений создания совершенных автоматических систем связано с применением для целей управления цифровых вычислительных машин (ЦВМ). В сложных цифровых управляющих комплексах цифровые следящие системы (ЦСС) широко используются в качестве устройств связи между объектами управления (ОУ) и ЦВМ. Цифровые следящие системы отличает высокая точность, хорошая помехозащищенность и быстродействие.
ЦВМ по отношению к следящей системе может выполнять функции задающего устройства, сравнивающего и корректирующего устройства. По характеру связи между следящими системами и ЦВМ их разделяют на:
а) автономные, в которых ЦВМ служит в качестве источника входной информации, т.е. выполняет роль задающего устройства;
б) неавтономные, в которых ЦВМ выполняет роль сравнивающего и корректирующего устройств.
По принципу управления исполнительным двигателем ЦСС можно разделить на системы с пропорциональным и релейным управлением. Цифровые системы строят на базе комплекса средств вычислительной техники, основными элементами которого являются: ЦВМ, устройства ввода, устройства вывода.
Функции ЦВМ могут выполнять:
1) ЭВМ (компьютеры);
2) DSP- цифровые сигнальные процессоры;
3) ЦУ на жесткой логике (разрабатываются для конкретных устройств).
Устройствами ввода и вывода в случае стыковки с аналоговыми сигналами являются АЦП и ЦАП, а в случае стыковки с цифровыми сигналами - порты и интерфейсы.
Если ЦВМ универсальная, то возможно построение многофункциональных САУ, когда одна ЦВМ обслуживает комплекс составляющих объект устройств. В этих случаях в состав системы ЦУ должны входить аналоговые или цифровые мультиплексоры и демультиплексоры.
Во всех случаях ЦВМ представляет легко доступные информационные потоки, позволяющие кроме прямого управления осуществлять функции контроля, оптимизации, координации и организации всех процессов.
Дискретная природа ЦВМ определяет наличие двух процессов в системах ЦУ: 1) дискретизации сигналов по времени (получение решетчатой функции); 2) квантование сигналов по уровню (АЦ, ЦА преобразователи). Дискретизация по времени делает систему дискретной, а квантование по уровню – нелинейной. Оба процесса сопровождаются возникновением методических погрешностей.
Приведем функциональные схемы цифровых систем (рис. 16).

а) автономная
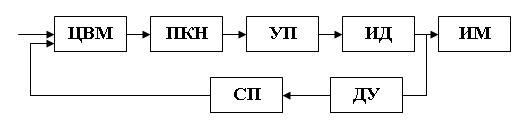
б) неавтономная
Рисунок 16 – Функциональные схемы автономных и неавтономных цифровых следящих систем
ПКН - преобразователь кода в напряжение.
УП – усилитель-преобразователь.
ИД – исполнительный двигатель.
ИМ – исполнительный механизм (нагрузка ИД).
ДУ – датчик угла (аналоговый).
СП – схема преобразования угла в цифровой код.
ДУ+СП = ПУК – преобразователь угол-код.
ДВУ – дополнительное вычислительное устройство (может выполнять роль простого сумматора).
Выбор автономного или неавтономного типа ЦСС проводится на основе анализа требований, предъявляемых к динамической точности ЦСС и загруженности ЦВМ. По числу используемых микромодулей (микросхем); преимущество имеют релейные неавтономные ЦСС.
При динамическом синтезе ЦСС важное значение приобретают расчетные структурные схемы. В общем случае структуру автономной ЦСС можно представить следующей схемой рис.17 (а):
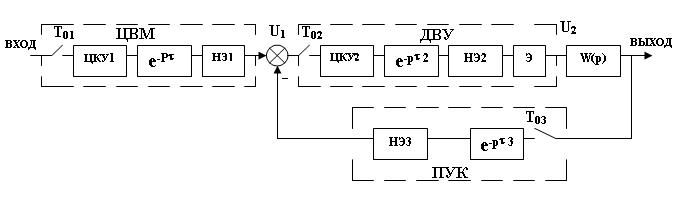
а) автономная
б) неавтономная
Рисунок 17 – Структуры ЦСС
Все нелинейные элeменты (НЭ1, НЭ2, НЭ3) имеют следующую статическую характеристику:
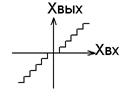 |
Рисунок 18 – Статическая характеристика
ЦКУ1 и ЦКУ2 – цифровые корректирующие устройства, обрабатывающие информацию ЦВМ и ДВУ соответственно, с помощью их реализуют принятые законы управления.
В случае линейных законов управления общего вида для автономной системы:


где l и r – число запоминаемых значений сигнала, поступающего на вход ЦВМ и ДВУ соответственно;
m и n – число запоминаемых значений выходного сигнала ЦВМ и ДВУ.
Дискретные передаточные функции ЦКУ будут:
W1(z)=  ;
;
W2(z)=  .
.
Звенья постоянного временного запаздывания е-pt1, e-pt2 , e-pt3 учитывают время, затраченное ЦВМ, ДВУ и ПУК на обработку информации.
Эффект квантования по времени учитывается введением (ключей) импульсных элементов, имеющих периоды дискретности Т01 , Т02, Т03.
Эффект квантования по уровню отображается в схеме нелинейными элементами НЭ1, НЭ2, НЭ3, имеющими релейную характеристику с числом ступеней n=2a-1, где a - число используемых двоичных разрядов.
Экстраполятор (Э) преобразует сигнал в виде решетчатой функции в сигнал непрерывной формы. В простейшем случае он запоминает информацию на период дискретности (экстраполятор нулевого порядка) и его передаточная функция
Wэ(p)= 
Если Т02=Т03 и значительно меньше Т01 и не учитывать квантование по уровню, схему можно упростить (рис. 19).

Рисунок 19 – Структура без учета квантования по уровню
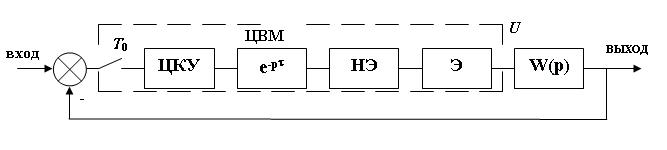
При достаточно высоком быстродействии ЦВМ целесообразно включать в замкнутый контур следящей системы; т.е. возложить на нее функции выработки кода ошибки и коррекции системы (система неавтономна). Упрощенная схема такой системы приведена на рис.20 (без учета квантования по уровню, и предположения, что опрос задатчика и датчика обратной связи происходит с одним и тем же периодом дискретности Т0).
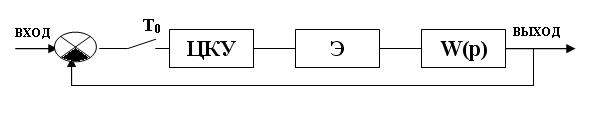
Рис. 20 – Упрощенная структура
Такая схема принимается за основу при синтезе ЦСС, динамические свойства ЦСС рассматриваются на основе теории импульсных систем. Выбор частоты дискретизации производится исходя из ширины полосы пропускания или времени регулирования замкнутой системы (в соответствии с теоремой Котельникова). Разумные частоты дискретизации 6-10 раз больше ширины полосы пропускания или от 2 до 4 дискретных отсчетов за время нарастания, в противном случае, качество систем резко ухудшается.
Количество ступеней квантования по уровню оказывает существенное влияние на динамические свойства систем, при недостаточном их количестве могут возникать автоколебания между дискретами.

