 2015-06-28
2015-06-28 1406
1406При конструировании часто применяют специальные меры, преследующие цель эффективного снижения влияния сил трения в опорах подвеса на поведение чувствительного элемента прибора. На принципиальную возможность создания таких устройств еще в начале текущего столетия указал Н. Е. Жуковский. Им высказаны две идеи, которые в современной литературе носят названия 1 и 2 принципы Н. Е. Жуковского. Суть 1 принципа сводится к компенсации сил трения силами трения. Примером реализации 1 принципа Н. Е. Жуковского являются разно вращающиеся реверсируемые опоры, нашедшие широкое применение в опорах гироузла прецизионных курсовых гироскопов.
Суть 2 принципа Н. Е. Жуковского состоит в принудительном «развороте» вектора силы сухого трения, действующего в месте контактирования частей опоры. Поясним действие 2 принципа следующим образом. Пусть на некоторой поверхности находиться тело 1 (см. рис. 6), прижатое к этой поверхности силой

Здесь:  - проекции вектора
- проекции вектора  на оси ОХ и ОУ.
на оси ОХ и ОУ.
Таким образом, для снижения влияния сил трения в направлении оси ОХ необходимо сообщить телу принудительное движение в направлении оси ОУ; такое, чтобы  . Если перейти к эффективному коэффициенту трения
. Если перейти к эффективному коэффициенту трения  , то можно записать
, то можно записать
если основное движение происходит в направлении оси ОХ. Подобный эффект снижения влияния трения, а не уменьшения самого трения, реализуется в опорах, схема которых представлена на рис. 7. Колебательное движение создается механическими или электромагнитными устройствами.
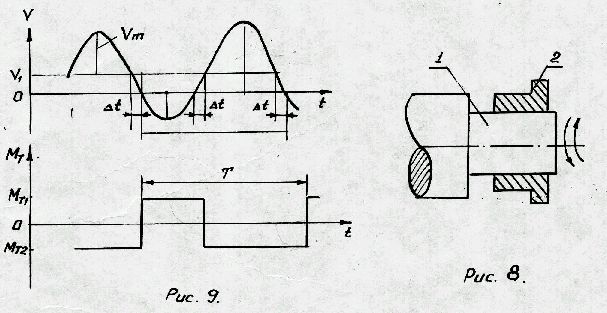
В ряде случаев (см. рис. 8) «оживление» опор осуществляют за счет колебательного движения относительно оси опоры. В этом случае относительная скорость в опоре равна
 ;
;
где  - скорость вала 1;
- скорость вала 1;  - амплитуда скорости колебательного движения цапфы 2,
- амплитуда скорости колебательного движения цапфы 2,  - частота движения цапфы.
- частота движения цапфы.
На рис. 9 показана зависимость момента трения опоры от времени. Очевидно  среднее значение момента трения
среднее значение момента трения  за период вынужденных колебаний равно
за период вынужденных колебаний равно
 ;
;
где  - период колебаний;
- период колебаний;  ;
;
или 
Если ввести обозначение соответствующего момента через коэффициент трения  , где
, где  - коэффициент пропорциональности, выражаемый через параметры опоры, то
- коэффициент пропорциональности, выражаемый через параметры опоры, то

Первая часть выражения определяет практически предел эффективности «оживления» и вызвана несимметрией сил трения в прямом и обратном направлении движения. Если  где
где  - параметр, характеризующий несимметричность сил трения (обычно
- параметр, характеризующий несимметричность сил трения (обычно  =0,07….0,3), то
=0,07….0,3), то
 .
.
Для маятникового акселерометра порог чувствительности порог чувствительности будет определяться соотношением  ;
;
Где  - радиус цапфы опоры подвеса чувствительного элемента;
- радиус цапфы опоры подвеса чувствительного элемента;
l – рабочая длина цапфы.
При конструировании часто применяют специальные меры, преследующие цель эффективного снижения влияния сил трения в опорах подвеса на поведение чувствительного элемента прибора. На принципиальную возможность создания таких устройств еще в начале текущего столетия указал Н. Е. Жуковский. Им высказаны две идеи, которые в современной литературе носят названия 1 и 2 принципы Н. Е. Жуковского. Суть 1 принципа сводится к компенсации сил трения силами трения. Примером реализации 1 принципа Н. Е. Жуковского являются разно вращающиеся реверсируемые опоры, нашедшие широкое применение в опорах гироузла прецизионных курсовых гироскопов.
Рис. 4.
 – угловая скорость объекта; и – угловые скорости валиков;
– угловая скорость объекта; и – угловые скорости валиков;  – силы сухого трения, действующие со стороны валиков.
– силы сухого трения, действующие со стороны валиков.



Выводы:
1. Природа момента сил сухого трения – не изменилась, но зависимость момента от угловой скорости объекта – стала "эквивалентной" вязкому трению!
2. При равномерном распределении нагрузки (давления объекта на валики) суммарный момент сил сухого трения, действующий на объект, равен нулю.
Рис.5. Фрагмент "левой" опоры.
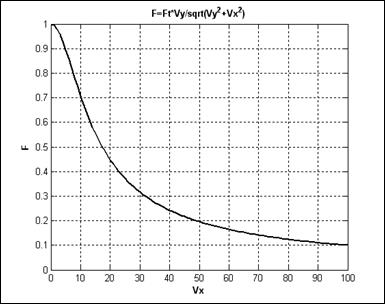
Рис.6.Изменение силы сухого трения при "развороте" вектора скорости.
Суть 2 принципа Н. Е. Жуковского состоит в принудительном «развороте» вектора силы сухого трения, действующего в месте контактирования частей опоры. Поясним действие 2 принципа следующим образом. Пусть на некоторой поверхности находиться тело 1 (см. рис. 6), прижатое к этой поверхности силой G. Следовательно, по закону Кулона - Амонтона сила трения при движении тела 1 относительно поверхности равна  ; f – коэффициент трения скольжения. Введем систему координат, связанную с телом 1, ОХУ. Вектор силы трения направлен в противоположную сторону вектора относительно скорости
; f – коэффициент трения скольжения. Введем систему координат, связанную с телом 1, ОХУ. Вектор силы трения направлен в противоположную сторону вектора относительно скорости  перемещения тела 1. Следовательно, проекции вектора силы трения
перемещения тела 1. Следовательно, проекции вектора силы трения  на оси ОХ и ОУ, соответственно равны:
на оси ОХ и ОУ, соответственно равны:
 ,
,  .
.
Здесь: - проекции вектора на оси ОХ и ОУ.
Таким образом, для снижения влияния сил трения в направлении оси ОХ необходимо сообщить телу принудительное движение в направлении оси ОУ; такое, чтобы . Если перейти к эффективному коэффициенту трения , то можно записать
если основное движение происходит в направлении оси ОХ. Подобный эффект снижения влияния трения, а не уменьшения самого трения, реализуется в опорах, схема которых представлена на рис. 7. Колебательное движение создается механическими или электромагнитными устройствами.
В ряде случаев (см. рис. 8) «оживление» опор осуществляют за счет колебательного движения относительно оси опоры. В этом случае относительная скорость в опоре равна
;
где - скорость вала 1; - амплитуда скорости колебательного движения цапфы 2, - частота движения цапфы.
На рис. 9 показана зависимость момента трения опоры от времени. Очевидно среднее значение момента трения за период вынужденных колебаний равно
;
где - период колебаний; ;
или
Если ввести обозначение соответствующего момента через коэффициент трения , где - коэффициент пропорциональности, выражаемый через параметры опоры, то
Первая часть выражения определяет практически предел эффективности «оживления» и вызвана несимметрией сил трения в прямом и обратном направлении движения. Если где - параметр, характеризующий несимметричность сил трения (обычно =0,07….0,3), то
.
Для маятникового акселерометра порог чувствительности порог чувствительности будет определяться соотношением ;
Где - радиус цапфы опоры подвеса чувствительного элемента;
l – рабочая длина цапфы.
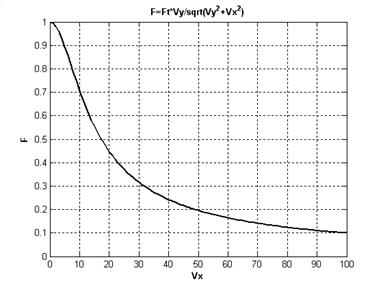
Рис. Изменение силы сухого трения при "развороте" вектора скорости.
Рис.1. Разновращаемые реверсируемые опоры.
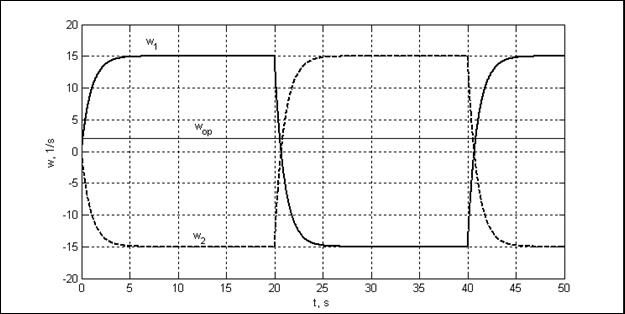
Рис. 1. Угловые скорости вращения: кольца левого подшипника w1;
кольца правого подшипника w2; полуосей гироузла wop.

Рис.2. Моменты сил сухого трения:
момент сил сухого трения, создаваемого левым подшипником Mtr1;
момент сил сухого трения, создаваемого правым подшипником Mtr2;
суммарный момент трения, действующий на гироузел MΣ.
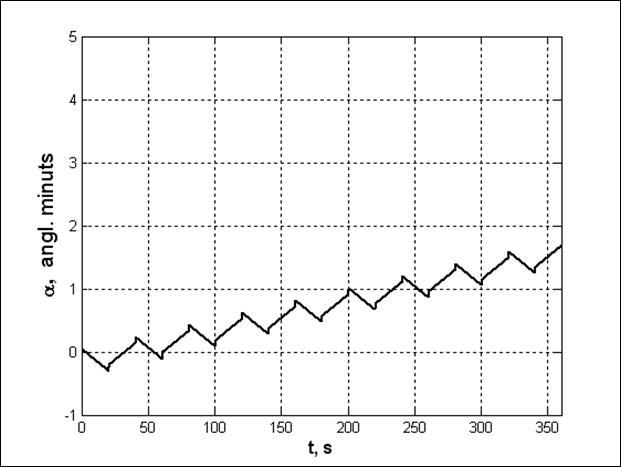
Рис.3. Угол поворота гироскопа относительно оси наружной рамы α;
уход гироскопа (скорость дрейфа) - 0.30/ч
%Proba:KFric_1
clc;clear;clf;
Dw=0.1:0.1:5;
lamb=(0.009*Dw.^2-0.33*Dw+4.5).*10^(-4);
plot(Dw,lamb,'-k')
grid on
xlabel('D_W, mm');
ylabel('\lambda,cm');








