 2015-06-28
2015-06-28 671
671Как отмечалось ранее, времена запаздывания лучей  и число лучей К часто являются случайными и заранее не известными переменными. Для того чтобы определить структуру оптимального приемника в этом случае, мы несколько упростим модель многолучевости. Теперь мы будем полагать, что времена tk независимы и описываются одним общим распределением плотности вероятностей р (tк), 0< tк <D, а их индексы переупорядочены в соответствии с ростом величины tк. Такая модель противоречит принятым допущениям, потому что условие разрешимости лучей (3.20) в данном случае уже не выполняется, так как возможны два луча, для которых | tk - tl |<1/ W. Но вероятность этого события будет мала, если мала суммарная вероятность интервалов длительностью, равной или меньшей 1/W; следовательно, распределение p(tk) должно иметь размытый («диффузный») характер, не иметь высоких пиков и удовлетворять условию W D>>1.
и число лучей К часто являются случайными и заранее не известными переменными. Для того чтобы определить структуру оптимального приемника в этом случае, мы несколько упростим модель многолучевости. Теперь мы будем полагать, что времена tk независимы и описываются одним общим распределением плотности вероятностей р (tк), 0< tк <D, а их индексы переупорядочены в соответствии с ростом величины tк. Такая модель противоречит принятым допущениям, потому что условие разрешимости лучей (3.20) в данном случае уже не выполняется, так как возможны два луча, для которых | tk - tl |<1/ W. Но вероятность этого события будет мала, если мала суммарная вероятность интервалов длительностью, равной или меньшей 1/W; следовательно, распределение p(tk) должно иметь размытый («диффузный») характер, не иметь высоких пиков и удовлетворять условию W D>>1.
Однако для отыскания структуры нашего квазиоптимального приемника указанные отличия от реальности несущественны. Поэтому для случая неизвестных запаздываний интенсивности любых двух лучей ak и al для всех k¹1 будут полагаться независимыми, что отличается от реальности, так как лучи с незначительно различающимися запаздываниями имеют, как правило, коррелированные интенсивности. Однако интуитивно ясно, что, как и в. случае с упрощенной моделью запаздываний, приемник, полученный на основе этой упрощенной модели интенсивностей лучей, будет близок к оптимальному.
Такой приемник, с учетом сделанных допущений, должен вычислять величины
 , l= (1, M) (3.26)
, l= (1, M) (3.26)
где где p (•) — определенная выше плотность распределения времен запаздывания лучей, Xl (•) — огибающая выхода l -го фильтра, a F [• ] — некоторая нелинейная функция. Затем значения этих величин сравниваются и индекс наибольшей из них считается принятым сигналом. Таким образом, величину wi можно реализовать, пропуская Xi (t) сначала через нелинейность F, а затем через фильтр с импульсной характеристикой hp(t)=p(D—t) и беря отсчет сигнала на выходе этого фильтра в момент времени t = T +D. Заметим, что фильтр hp(t) в идеале должен быть согласован с импульсной характеристикой канала hc (t): hp(t) = hc (D- t).
Решающая схема, показанная на рис. 3.3, в этом случае заменяется схемой, показанной на рис. 3.5.
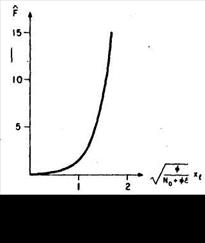 Следует отметить, что в отличие от выражений (3.24) и (3.25), где отсчеты xik, k=0,..., К- 1, объединяются по линейному и квадратичному законам, для объединения отсчетов в (3,26) используются экстремальные нелинейности экспоненциального типа, показная на рис. 3.6.
Следует отметить, что в отличие от выражений (3.24) и (3.25), где отсчеты xik, k=0,..., К- 1, объединяются по линейному и квадратичному законам, для объединения отсчетов в (3,26) используются экстремальные нелинейности экспоненциального типа, показная на рис. 3.6.
|
Такая нелинейность подчеркивает сильные сигналы и подавляет слабые. В этом проявляется определенная «самоадаптивность» приемника, в неявном виде присутствующая в (3.26). Следовательно, сигналы на выходе нелинейностей несут в себе информацию, непосредственно характеризующую апостериорные вероятности существования лучей. Согласно (3.26), эти сигналы далее взвешиваются в соответствии с априорными вероятностями размещения лучей, в неявном виде входящими в функцию p (•). Следует подчеркнуть, что изложенная позитивная роль нелинейности проявляется при относительно большой средней величине ОСШ, когда пики сигнала имеют большую величину по сравнению с шумом и уровнем боковых лепестков. При малом ОСШ эффект подавления шума нелинейностями будет выражаться слабее – тем слабее, чем меньше ОСШ. Можно показать, что в данном случае приемник сигналов с известными запаздываниями (например, приемник, реализующий соотношение (3.24) или (3.25)), в котором отсчеты выходных сигналов детекторов огибающей берутся только в моменты времени, соответствующие пикам сигналов, а вклады шума не учитываются, будет иметь более высокие характеристики, чем приемник сигналов с неизвестными запаздываниями.








