 2015-06-28
2015-06-28 1582
1582Как отмечалось выше, фазово-когерентные методы не рассматриваются из-за сложности когерентных приемников и из-за быстрых временных изменений фаз лучевых сигналов, принимаемых подвижной станцией. (В разделе 3.2.2 будет показано, как можно построить когерентный приемник, используя когерентный рекурсивный интегратор.) Однако разностно-когерентные методы оказываются вполне применимыми, когда на интервале между двумя последовательно переданными сигналами фазы лучей существенно не изменяются. Это — обычный для практики случай. И хотя структура оптимального разностно-когерентного приемника многолучевого сигнала нам не известна, она, по-видимому, должна быть весьма сходной со структурой приемника при однолучевом распространении сигнала (рис.3.7).
Предположим теперь, что в многолучевом случае, удовлетворяющем условиям упрощенной модели (распределенные по пуассоновскому закону запаздывания разрешимых лучей и независимые интенсивности), оптимальный приемник ОФМ-сигнала также связан с приемником, показанным на рис. 3.7, как и приемник, показанный на рис.3.5, с приемником, показанным на рис. 3.3. Иными словами, мы будем полагать, что этот оптимальный приемник имеет вид, показанный на рис. 3.8.
На этом рисунке нелинейность
 (3.28)
(3.28)
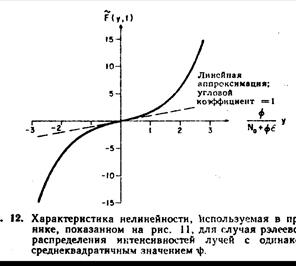
является биполярным вариантом нелинейности F, что обусловлено тем фактом, что входом этой нелинейности является квадрат огибающей выхода согласованного фильтра, а не сама огибающая, как на рис. 3.5. График функции  для случая, когда F определяется выражением (3.28), показан на рис. 3.10 (ср. с рис. 3.6).
для случая, когда F определяется выражением (3.28), показан на рис. 3.10 (ср. с рис. 3.6).
Решающая схема на рис. 3.8 с периодом Т берет отсчеты сигнала на выходе интегрирующего фильтра hp (•), с тем, чтобы определить экстремумы этого сигнала. Форма колебаний в различных точках приемника показана на рис. 3.9. В отсутствие шума выход у (t)детектора произведения в схеме на рис. 3.7 и, следовательно, вход нелинейности в схеме на рис. 3.8, будут приближенно иметь вид
 (3.29)
(3.29)
при передаче символа d = 0 или 1, принятого на интервале [ T, 2T ]
|
|
|
 Пример такого «незашумленного» выхода y(t) показан на рис. 3.9, г для входной двоичной последовательности 101100. Выходы нелинейности F и фильтра hp (•)
Пример такого «незашумленного» выхода y(t) показан на рис. 3.9, г для входной двоичной последовательности 101100. Выходы нелинейности F и фильтра hp (•)
 (3.29а)
(3.29а)
|
|
3.2.1.5.
|
|
|
|
Обычно используется другой подход, в котором предполагается, что в результате зондирования получаются очень точные оценки всех трех переменных { tk }, { ak }и {qk} или хотя бы двух первых из них. Эти оценки полагаются точными и используются в приемнике в качестве параметров.
Ниже мы ограничимся рассмотрением некогерентных приемников с зондированием канала, в которых используются только оценки интенсивностей и запаздываний лучей.
«Оптимальный» приемник М- лучевого сигнала, в котором используются оценки интенсивностей и запаздываний, можно, очевидно, реализовать на основе выражения (3.24). Такой приемник должен вычислять величины
 (3.30)
(3.30)
где  — оценка интенсивности k- голуча,
— оценка интенсивности k- голуча,  — отсчет огибающей сигнала на выходе 1- госогласованного фильтра в момент времени t—T+tk, a
— отсчет огибающей сигнала на выходе 1- госогласованного фильтра в момент времени t—T+tk, a  — оценка запаздывания k- го луча. Индекс l= 1 ,..., М, для которого величина wl максимальна, является цифровым выходом приемника. Если ОСШ для каждого луча достаточно велико, то (3.30) можно аппроксимировать выражением
— оценка запаздывания k- го луча. Индекс l= 1 ,..., М, для которого величина wl максимальна, является цифровым выходом приемника. Если ОСШ для каждого луча достаточно велико, то (3.30) можно аппроксимировать выражением
 (3.31)
(3.31)
так как при больших х 1n I0 (х)» х. Выражение (3.31) описывает оптимальный линейный сумматор Бреннана [8], используемый при разнесенном приеме сигналов; мы также будем его использовать, поэтому остановимся на нем несколько подробнее.
Линейный сумматор, описываемый выражением (3.31), можно реализовать с помощью трансверсального фильтра, как показано на рис. 3.11. Этот фильтр состоит из линии задержки на время D, у которой сделаны отводы с интервалом, равным по крайней мере 1 /W, так что всего имеется WD отводов. На вход трансверсального фильтра подается напряжение с выхода детектора огибающей, например Xj{(t) (см. рис. 3.5). Выход трансверсального фильтра представляет собой взвешенную сумму сигналов с определенных отводов, номера которых зависят от оценок запаздываний лучей.
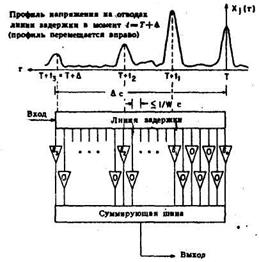 Оценки tk (k= 0,.... К —1) используются для включения усилителей, подсоединенных к отводам, задержки которых (измеряемые с правого конца линии) наиболее точно аппроксимируют оценки . Иными словами, активируется К усилителей, коэффициенты усиления которых устанавливаются пропорционально величинам соответствующих оценок интенсивностей . На рис. 3.11 указаны коэффициенты усиления усилителей при приеме четырех лучевого сигнала.
Оценки tk (k= 0,.... К —1) используются для включения усилителей, подсоединенных к отводам, задержки которых (измеряемые с правого конца линии) наиболее точно аппроксимируют оценки . Иными словами, активируется К усилителей, коэффициенты усиления которых устанавливаются пропорционально величинам соответствующих оценок интенсивностей . На рис. 3.11 указаны коэффициенты усиления усилителей при приеме четырех лучевого сигнала.
|
— точные оценки времен запаздывания, то в момент времени t=T+ D, напряжение на выходе трансверсального фильтра будет приближенно равно величине:  (3.22)
(3.22)
т. е. оказывается пропорциональной величине wl, определяемой (3.21) при l = j.
Таким образом, трансверсальный фильтр является фильтром, согласованным с оценкой значения низкочастотного эквивалента импульсной характеристики канала hc (t).
 В процессе перемещения xj(t) на рис. 3.11 вправо трансверсальный фильтр осуществляет свертку xj(t) с hij(t), показанных соответственно на рис. 3.12, а и 3.12, б, в результате чего формируется выходной сигнал, показанный на рис. 3.12, в. Главный пик этого сигнала соответствует моменту времени t = T +D, т. е. тому моменту, когда входной сигнал xj(t) занял такое положение, при котором его пики расположены точно над активированными отводами линии задержки. Высота главного лика пропорциональна величине (3.22). Выходной сигнал имеет также небольшие побочные пики, пропорциональные величинам
В процессе перемещения xj(t) на рис. 3.11 вправо трансверсальный фильтр осуществляет свертку xj(t) с hij(t), показанных соответственно на рис. 3.12, а и 3.12, б, в результате чего формируется выходной сигнал, показанный на рис. 3.12, в. Главный пик этого сигнала соответствует моменту времени t = T +D, т. е. тому моменту, когда входной сигнал xj(t) занял такое положение, при котором его пики расположены точно над активированными отводами линии задержки. Высота главного лика пропорциональна величине (3.22). Выходной сигнал имеет также небольшие побочные пики, пропорциональные величинам  (k =0, 1, 2, 3; r¹k), и боковые лепестки, накопленные в результате свертки hij (t)с боковыми лепестками сигнала хj (t). Ясно, что для получения (3.22) необходимо оставить только один главный пик.
(k =0, 1, 2, 3; r¹k), и боковые лепестки, накопленные в результате свертки hij (t)с боковыми лепестками сигнала хj (t). Ясно, что для получения (3.22) необходимо оставить только один главный пик.
Таким образом, полный приемник M -лучевого сигнала, в котором используются оценки характеристик канала, будет иметь вид, показанный на рис. 3.13. Выход хl (t), l= 1,…, М каждого детектора огибающей подается на вход трансверсального фильтра типа показанного на рис. 3.11, параметры которого изменяются в соответствии с оценками { } и { },полученными от зондирующего приемника. В момент времени t = T+ D выходы трансверсальных фильтров считываются и сравниваются, в результате чего определяется индекс наибольшего из них. Такой приемник получил название «Рейк» из-за внешнего сходства профиля напряжения на отводах трансверсального фильтра с зубьями гребня или грабель [гаке (рейк) — грабли].
Зондирующий приемник, показанный на рис. 3.13, также может иметь структуру, образованную после  довательным соединением согласованного фильтра, детектора огибающей и линии задержки с отводами, причем согласованный фильтр согласуется с известным колебанием, которое может иметь большие энергию и длительность, чем информационные сигналы sj. Перед передачей данных (или во время передач, если характеристики канала изменяются достаточно быстро) зондирующий приемник «слушает» свой сигнал. Когда сигнал принят, огибающая напряжения на выходе согласованного фильтра будет иметь множество пиков, т. е. будет иметь вид, аналогичный показанному на рис. 3.12, а. Затем это колебание будет перемещаться по линии задержки так же, как показано на рис. 3.11. Когда первый пик сигнала достигает правого конца линии, срабатывает пороговый элемент и берутся отсчеты напряжений на всех отводах линии задержки, и их значения, которые пропорциональны интенсивностям лучей, запоминаются, если они превышают некоторую пороговую величину, в противном случае они полагаются равными нулю. Далее эти отсчеты используются для установки коэффициентов усиления усилителей, подключенных к отводам трансверсальных фильтров приемника информационных сигналов.
довательным соединением согласованного фильтра, детектора огибающей и линии задержки с отводами, причем согласованный фильтр согласуется с известным колебанием, которое может иметь большие энергию и длительность, чем информационные сигналы sj. Перед передачей данных (или во время передач, если характеристики канала изменяются достаточно быстро) зондирующий приемник «слушает» свой сигнал. Когда сигнал принят, огибающая напряжения на выходе согласованного фильтра будет иметь множество пиков, т. е. будет иметь вид, аналогичный показанному на рис. 3.12, а. Затем это колебание будет перемещаться по линии задержки так же, как показано на рис. 3.11. Когда первый пик сигнала достигает правого конца линии, срабатывает пороговый элемент и берутся отсчеты напряжений на всех отводах линии задержки, и их значения, которые пропорциональны интенсивностям лучей, запоминаются, если они превышают некоторую пороговую величину, в противном случае они полагаются равными нулю. Далее эти отсчеты используются для установки коэффициентов усиления усилителей, подключенных к отводам трансверсальных фильтров приемника информационных сигналов.
В самонастраивающемся варианте этого приемника для зондирования канала используются сами информационные сигналы. В момент времени, когда принято решение о том, что принят, скажем, j -й сигнал, напряжения на отводах j -го трансверсального фильтра фиксируются точно так же, как это было описано выше для зондирующего приемника. Затем значения этих напряжений используются для установки коэффициентов усиления соответствующих усилителей во всех трансверсальных фильтрах.
Следует отметить, что механизм зондирования выполняет также и функцию синхронизации приемника, которую мы пока не рассматривали. И в приемнике с раздельным зондированием, и в самонастраивающемся приемнике при срабатывании порогового устройства, подключенного к крайнему правому отводу линии задержки, запускаются часы (генератор синхронизирующих импульсов), с помощью которых обеспечивается соответствующая синхронизация отсчетных импульсов, поступающих на входы решающей схемы.
Наконец, отметим, что приемник ОФМ-сигнала можно построить, используя те же принципы, которые были заложены в приемнике системы «Рейк».
Комбинирование сигналов на основе RAKE-приемника реализовано в стандарта CDMA-2000. Приемные устройства мобильной станции (МС) и базовой станции (БС) включают несколько (3 на МС и 4 на БС) параллельно работающих корреляторов, которые выделяют наиболее сильные сигналы. Выходы корреляторов сводятся к одному и тому же моменту времени и суммируются. Тем самым эффект многолучевого распространения используется для повышения качества связи.

