 2015-06-28
2015-06-28 597
597
Роль фильтра, согласованного с каналом, в приемнике с последетекторным интегрированием (ПДИ-приемник, или просто ПДИ), представленным рис. 3.16, играет интегратор с постоянной времени интегрирования D, импульсная характеристика которого имеет вид (3.29 а). Эта характеристика предполагает, что запаздывания лучей равномерно распределены на интервале [0, D] и p (t к)=1/D, 0£ tk £D. В действительности запаздывания лучей распределены неравномерно, поэтому характеристика hp(t), определяемая выражением (3.29 а), будет субоптимальной. Так как НЧ-фильтр на рис. 3.7 необходим лишь для устранения составляющих удвоенной частоты на выходе умножителя, то на рис. 3.16 его функция возложена на интегрирующий фильтр, который также является фильтром низких частот.
Вход решающей схемы на рис. 3.16 будет все еще иметь вид, сходный с показанным на рис. 3.9 д, но теперь он будет получаться в результате интегрирования напряжения y(t) (рис. 3.9 в), а не напряжения, показанного на рис. 3.9 г. Отсчеты выхода интегрирующего фильтра будут, как и прежде, браться в моменты времени, указанные на рис. 3.9 е.
Расчет характеристик ПДИ проводился в предположении, что:
§ передаваемые сигналы ортогональны и имеют нулевые боковые лепестки;
§ нелинейность на рис. 3.8 имеет квадратичный характер;
§ все лучи независимы и их интенсивности имеют одинаковые релеевские распределения;
§ все лучи разрешимы;
§ D<< T, МСИ отсутствует;
§ в канале присутствует аддитивный белый шум с односторонней плотностью мощности N0.
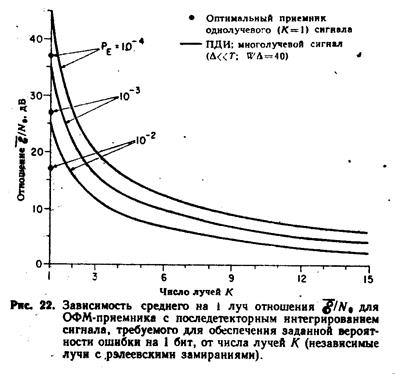 Результаты расчета для W D = 40 представлены на рис. 3.17.
Результаты расчета для W D = 40 представлены на рис. 3.17.
|
Для сравнения на рис. 3.17 указаны значения вероятности ошибки для оптимального однолучевого ОФМ-приемника. Нетрудно видеть, что при наличии ряда релеевских лучей с близкими среднеквадратич- ными интенсивностями, ПДИ значительно (на 5 – 20 дБ) превосходит приемник, который принимает сигнал по одному лучу (например, по ЛВЗ) и пренебрегает другими лучами. Это сравнение весьма убедительно иллюстрирует улучшение характеристик при разнесенном приеме, которое может обеспечить многолучевой канал.
3.2.1.8. Цифровой вариант приемника «Рейк»
В приемниках с зондированием канала (рис. 3.13 и 17) установка коэффициентов усиления усилителей, подключенных к отводам трансверсального фильтра (или фильтров) осуществляется в соответствии с оценками интенсивностей лучей. Однако для реализации значительно проще приемник (правда, он будет иметь несколько худшие характеристики), в котором отводы трансверсального фильтра просто подключаются к суммирующей шине в соответствии с текущими оценками времен запаздывания лучей. В этом случае необходимость получения оценок интенсивностей лучей отпадает, и зондирующий приемник должен лишь определять оценки времен запаздывания лучей {  }. Такой упрощенный вариант приемника мы будем называть «цифровым Рейк». Структура этого приемника при использовании ОФМ-сигналов показана на рис. 3.18, где в целях дальнейшего упрощения исключен также и вычислитель квадратного корня.
}. Такой упрощенный вариант приемника мы будем называть «цифровым Рейк». Структура этого приемника при использовании ОФМ-сигналов показана на рис. 3.18, где в целях дальнейшего упрощения исключен также и вычислитель квадратного корня.
|
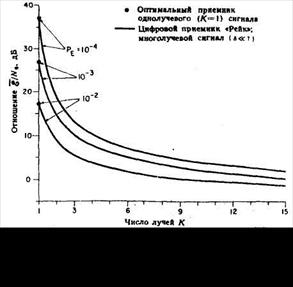
Оценки запаздываний лучей, поступающие от зондирующего приемника, используются здесь для замыкания соответствующих ключей в цепях отводов трансверсального фильтра, в результате чего эти отводы подключаются к суммирующей шине. Заметим, что при замыкании всех ключей приемник, показанный из рис. 3.18, оказывается примерно аналогичным ФМ-приемнику, показанному на рис. 3.16, у которого операция интегрирования на интервале D с заменена операцией суммирования в дискретных точках этого интервала. Характеристики этого приемника, аналогичные кривым рис. 3.17, представлены на рис. 3.19 для случая релеевских замираний без учета межлучевой и межсимвольной интерференции, наличие которой можно учесть введением дополнительного эквивалентного шума.








