 2015-07-04
2015-07-04 1514
1514Система управления поворотом колес передней ноги состоит из следующих устройств:
1. Пять блоков датчиков ДПР 45-01 (см. рис. 9….). Три из них являются задающими датчиками, а два - обратной связи (ОС). Два задающих датчика связаны с педалями соответственно 1-го и 2-го пилота. Третий задающий датчик находится под панелью первого пилота и механической проводкой связан с рукоятками управления режима руления обоих пилотов.
Датчики ОС находятся на передней ноге и связаны с ее поворотной частью.
ДПР 45-01 - датчик трансформаторного типа, запитывается напряжением 36В. С него снимается сигнал в виде напряжения, пропорционального углу поворота его ротора.
В каждом ДПР 45-01 предусмотрено по два датчика. Один работает в I канале, второй - во II канале системы.
2. БУС 20 - блок усиления и контроля (2 шт.).
Блоки обеспечивают:
- выбор режима работы;
- питание агрегатов и блоков своего канала;
- сравнение сигналов с задающих ДПР 45-01 и с датчиков ОС, формирование и выдачу управляющих сигналов в агрегаты управления каналов;
- контроль исправности каналов с выдачей информации об отказе;
3. АУ55-02 - агрегаты управления (2 шт.) по одному в каждом канале. Расположены в отсеке передней ноги слева и справа по полету.
Агрегаты управления обеспечивают:
- преобразование электрических сигналов БУС 20 в гидравлический сигнал;
- подачу давления в рулежное устройство;
- работу соответствующего канала в режиме самоориентирования.
4. КЭ-74 - электрогидравлический распределитель (2 шт.). Находится в отсеке передней ноги. КЭ-74 работает как запорный кран, обеспечивая подачу давления в соответствующий агрегат управления при включении системы.
5. Загружатель пружинного типа – механически связан с рукоятками режима руления. Загружатель создает на рукоятках усилие, пропорциональное их повороту, а после отпускания рукояток устанавливает их в нейтральное положение.
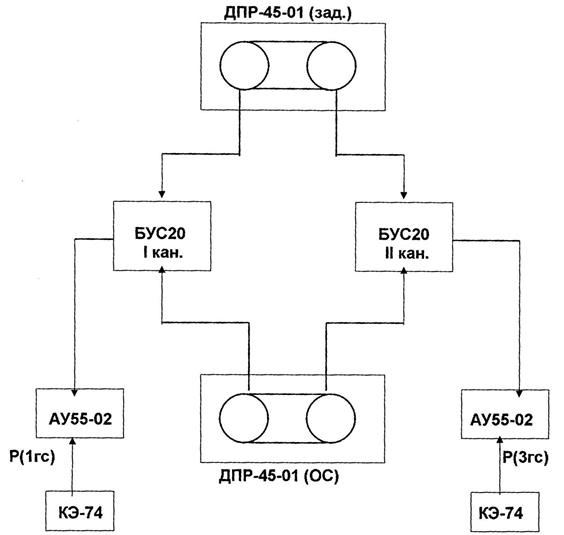
Рис. 10.17. Функциональная схема системы управления поворотом колёс передней ноги








