 2015-07-04
2015-07-04 4065
4065Системы управления электроприводами якорно-швартовных устройств обычно бывают разомкнутыми и только в некоторых случаях для получения необходимых механических характеристик применяют местные обратные связи.
По условиям работы якорно-швартовного устройства его
электропривод должен работать в кратковременном режиме, обеспечивая подъем и спуск якоря с различными скоростями,
плавный пуск под полной нагрузкой и торможение, а также стоянку исполнительного двигателя под током в течение 0'5мшн.
Выбор для электропривода якорно-швартовного устройства той или иной схемы управления (контроллерной, релейно-контакторной, электромашинной, бустерной или др.) зависит от мощности исполнительного двигателя. Весьма перспективными в настоящее время считаются схемы тиристорного управления.
Контроллерные схемы управления. Эти схемы используются при мощности исполнительного двигателя до 10 квт (реже – до 25 квт). Контроллерные схемы, предназначенные для электроприводов, небольшой мощности, отличаются простотой и надежностью работы, малым весом и небольшими габаритами, а также сравнительной дешевизной. С увеличением мощности привода схемы становятся все менее надежными и более громоздкими. К числу недостатков этих схем, относится и то, что они не обеспечивают:
а) автоматического ограничения момента двигателя при отрыве якоря от грунта, что в установках большой мощности может вызвать поломки в механизме или обрыв якорной цепи
(увеличение мощности всегда сопровождается уменьшением
запаса прочности механизмов);
б) ограничения бросков пусковых и тормозных токов, что
может явиться причиной кругового огня на коллекторе и короткого замь1кания в щеточном механизме двигателя.
Сказанное объясняет, почему контроллерные схемы управления требуют для своего обслуживания квалифицированного персонала. В систему управления входят: двигатель с электромагнитным тормозом, контроллер кулачкового или барабанного типа и ящики сопротивлений (в установках постоянного тока). Контроллеры кулачкового типа обеспечивают более надежную работу привода, в связи с чем они получили наибольшее распространение. К тому же их стали снабжать панелями защиты, что освободило контроллерные схемы от части перечисленных выше недостатков.
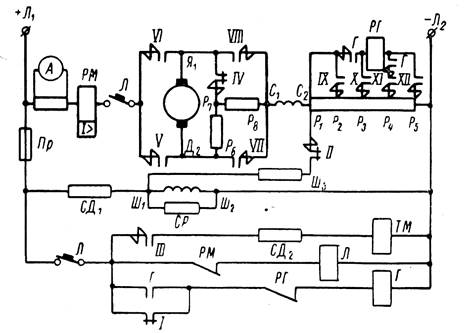
Контроллерная схема на постоянном токе приведена на рис. 1. Она укомплектована двигателем типа ДПМ – 32, 30-митнутная мощность которого составляет 22 кВт, пристроенным дисковым тормозом, типа ТДП – 3, сопротивлениями типов СКФ – 2 и СКФ – 3, а также кулачковым контроллером типа КВ – 2500 с одним нулевым и шестью рабочими положениями в каждую сторону.
После подачи напряжения на зажимы + Л и – Л контроллер устанавливают в нулевое положение и поворотом съемной рукоятки «От себя до отказа» включают линейные кулачковые элементы, которые в этом положении удерживаются получившей питание катушкой контактора Л. В то же время получает питание катушка контактора грузовой защиты Г и его замыкающие контакты замыкаются. Одновременно с подачей напряжения на схему включается параллельная обмотка возбуждения Ш1 – Ш2 через сопротивление СД1, падение напряжения в котором увеличивается в виду наличия параллельной ветви, образуемой сопротивлениями Ш1 – Ш3 и Р1 – Р3.
 |
 |
|
Для подъема якоря маховичок контроллера постепенно переводят в рабочее положение направления «Выбирать». На первом положении остаются замкнутыми контакты I и IV, размыкается контакт II и замыкаются контакты III, VI и VII. Благодаря этому двигатель растормаживается и подключается к сети. Размыкание контакта II усиливает поле полюсов, а замкнутый контакт IV обеспечивает шунтирование якоря параллельно включенными сопротивлениями Р7 – Р6 и Р7 – Р8. Двигатель начинает работать с небольшой скоростью на пер-
вой механической характеристике (рис.2).
 |
Рис. 2
С переводом маховичка контроллера во второе положение цепь шунтирующей якорь ветви разрывается контактом IV, и двигатель выходит на вторую (реостатную) характеристику.
Маховичок контроллера продолжает вращаться в направлении «Выбирать», и двигатель все больше разгоняется, переходя с одной механической характеристики на другую благодаря последовательному выведению из цепи якоря сопротивлений Р1 – Р5. В последнем (шестом) положении, соответствующем работе двигателя на шестой характеристике, сопротивления в цепи якоря будут полностью зашунтированы. Кроме того, включением контакта II магнитный поток ослабляется из-за шунтирования обмотки возбуждения Ш1 – Ш2 сопротивлением Ш1 – Ш3.
Работа схемы при положении контроллера «Травить» аналогична рассмотренной с той лишь разницей, что:
а) вместо контактов направления VI и VII замsкаются контакты V и VIII, что обеспечивает изменение направления тока в якоре и реверс двигателя;
б) контакт II не замыкается ни в одном из положений
«Травить», и магнитный поток полюсов не ослабляется;
в) во всех положениях «Травить» якорь остается зашунтированным что уменьшает скорость двигателя, а механические характеристики перемещаются параллельно самим себе вправо - в квадрант генераторного торможения.
Чтобы остановить двигатель, надо перевести маховичок контроллера в нулевое положение; при этом якорь оказывается
замкнутым на сопротивление динамического торможения Р6 – Р7. Разомкнувшийся контакт III обесточивает тормозной электромагнит и вызывает механическое торможение двигателя.
Рассмотренная схема обеспечивает следующие виды защиты:
а) минимальную и нулевую, которые осуществляются контактором Л, освобождающим защелку, удерживающую контакты Л в замкнутом состоянии;
б) максимальную, обеспечиваемую максимально-токовым
реле РМ, размыкающим цепь катушки контактора Л;
в) грузовую, реализуемую грузовым реле РГ и контактором Г.
В случае увеличения тока нагрузки свыше допустимого предела срабатывает реле РГ, разрывающее цепь катушки грузового контактора Г. В результате этого в цепь якоря вводится сопротивление Р2 – Р5 (третья механическая характеристика). При исчезновении перегрузки возврат двигателя на шестую характеристику возможен лишь после перевода контроллера в третье положение и замыкания контакта I. Разгон двигателя вновь производится обычным порядком.

