 2015-07-04
2015-07-04 722
722Зависимость линейных координат в какой-либо точке механизма от обобщенной координаты – линейная функция положения данной точки в проекциях на соответствующие оси координат.
Хс= f(j1)
Зависимость угловой координаты какого-либо звена механизма от обобщенной координаты – угловая функция положения данного звена.
j2= f(j1)
Первая производная линейной функции положения точки по обобщенной координате – линейная передаточная функция данной точки в проекциях на соответствующие оси координат (иногда называют «аналог линейной скорости…»)








полная скорость т. С будет 
Первая производная угловой функции положения звена по обобщенной координате – передаточное отношение.

Вторая производная линейной функции положения по обобщенной координате – аналог линейного ускорения точки в проекциях на соответствующие оси.


Вторая производная угловой функции положения звена по обобщенной координате – аналог углового ускорения звена.
Основными задачами кинематического исследования движения звеньев механизма являются:
1) определение положения звеньев и траекторий заданных точек;
2) определение линейных и угловых скоростей и ускорений звеньев и отдельных точек механизма.
Для этой цели применяются следующие методы:
a) графический (планы скоростей и ускорений);
б) графоаналитический (метод диаграмм);
в) аналитический.
Методы а и б уступают в точности аналитическому, но обладают простотой и наглядностью.
Для выполнения анализа движения звеньев механизма должны быть заданы:
а) схема механизма и
б) размеры его звеньев, а так же
в) функция зависимости перемещений ведущих звеньев от параметра времени или др. параметров их движения.
Построение планов механизма имеет целью определение относительных расположений звеньев и траекторий движения их точек по заданным положениям ведущих звеньев. Решение этой задачи производится при помощи метода засечек.
Планом механизма называют масштаб графического изображения кинематической схемы соответствующей заданному положению входного звена.
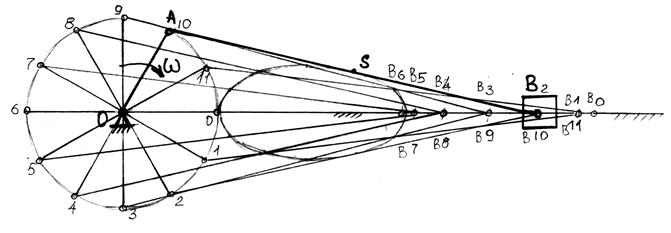 Рис 1.
Рис 1.
Определение скоростей и ускорений методом построения кинематических диаграмм.
Кинематической диаграммой принято называть зависимость какого-либо параметра движения звена от времени или параметра перемещения ведущего звена, представляемую графически кривой в прямоугольной системе координат.
Наивысший интерес представляют графики S, V, W ведомых звеньев. В качестве параметра S ведущего звена могут быть выбраны либо угол поворота, либо одна из координат принадлежащей ему точки. Эти параметры связаны с параметром времени.
Как известно, функции S,V и W движения какой-либо точки могут быть определены при помощи дифференцирования или интегрирования.








