 2015-07-04
2015-07-04 347
347· Передаточная функция объекта вместе с исполнительным устройством в общем случае имеет вид:
W(p) =  (1)
(1)

Отметим, что согласно принятым ограничениям на коэффициенты передаточная функция W(p) может содержать только устойчивые и нейтральные звенья.
· В качестве регулятора в системе используется релейный элемент (симметричный).
· Предполагается, что кроме выходной координаты объекта x возможно измерить или вычислить с допустимой точностью её производную y = x’.
· При изучении динамики системы мы ограничимся только ее собственными движениями.
Структурная схема системы показана на рисунках 1 и 2, где вектор х0 символически обозначает начальные условия, т.е. исходное положение объекта (х0, y0). Неотрицательная величина f на структурной схеме (рис. 1) называется коэффициентом воздействия по производной.
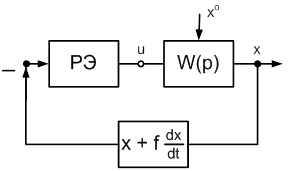
Рис.1
Система управления в общем случае описывается уравнением:
a0x''(t) + a1x'(t) + a2x = -ku[x(t – τ) + f·x'(t - τ)] (2)
Правая часть дифференциального уравнения 2 является функцией, которая в зависимости от значения ее аргумента может принимать только три фиксированных значения:
-kс, 0, +kс
Если в качестве регулятора используется двухпозиционное реле, то функция в правой части принимает только два фиксированных значения:
-kc, +kc








