 2015-07-14
2015-07-14 633
633Формируя новую искусственную характеристику можно менять положение рабочей точки A, B, C, которая определяется равенством момента механизма и двигателя, а, следовательно, изменять скорость. Отметим, что понижение скорости связано с введением дополнительного сопротивления, что приводит к дополнительным потерям мощности в реостате I2Rр и снижению η. Поэтому такой способ регулирования не находит широкого применения.
Рассмотрим пуск двигателя:
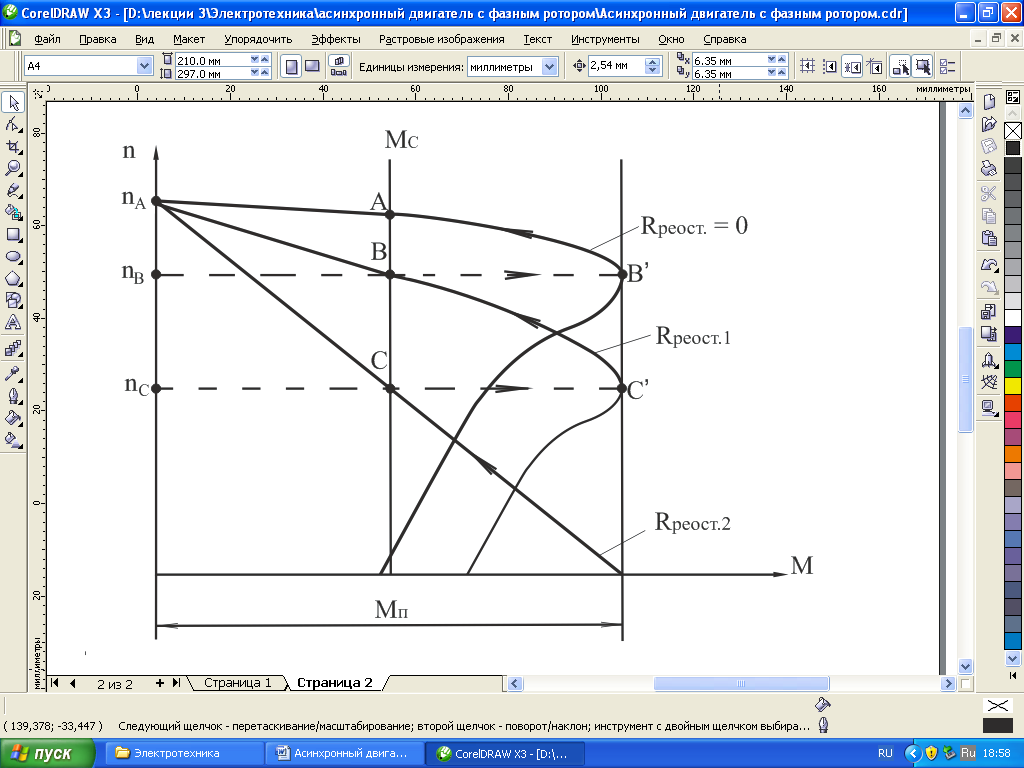
Введем Rр2. Т. к. Мп>Мc, двигатель разгоняется до скорости nс. Если уменьшить сопротивление реостата до Rр1<Rр2, М на этой скорости увеличится до М'с, что приводит к дальнейшему увеличению скорости до nв. Убрав реостат, переходим на естественную характеристику. Т. к. М'в> Мв, произойдет дальнейшее увеличение скорости до точки nА, определяемой равенством момента двигателя и механизма, что и определяет рабочую точку.








