 2015-07-14
2015-07-14 632
632К достоинствам центробежных вентиляторов относятся:
1. простота конструкции;
2. минимальное число изнашивающихся частей;
3. равномерность подачи воздуха, что позволяет увеличить его скорость в воздухо
водах и уменьшить площадь поперечного сечения и массу последних;
5. возможность непосредственного сочленения насоса с электродвигателем.
К недостаткам центробежных вентиляторов относятся:
1. необходимость применения клиноременных передач для вентиляторов большой мощности.
4. Щелочные аккумуляторы
Устройство. Если кислотные аккумуляторы используют в качестве стартерных, то для питания прочих низковольтных устройств применяют щелочные кадмиево-никелевые и железоникелевые аккумуляторы (они одинаковы по конструкции и составу электролита).
Корпус 9 щелочного аккумулятора (рисунок 5.1) изготовляют сварным из листовой стали, покрытой никелем. Технология изготовления положительных 4 и отрицательных 11 пластин одинакова: их выполняют из тонких перфорированных листов стали в виде ламелей-футляров 3, в которые помещается активная масса 1.
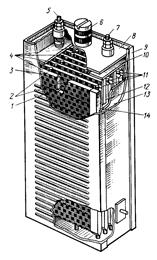
Рисунок 5.1 – Щелочной аккумулятор
Гидрат окиси никеля Ni(OH)3 служит активной массой положительных пластин щелочных аккумуляторов обоих типов. Активная масса отрицательных пластин у кадмиево-никелевых аккумуляторов состоит из смеси губчатого кадмия с железом, а у железоникелевых - из смеси электрохимически активного железа (губчатого железа) с его окислами и небольшого количества окиси ртути. В электрохимических процессах участвуют Cd или Fe, а присадки улучшают электрохимические свойства масс
С помощью контактных пластин 12 и соединительных бареток 10 пластины собирают в блоки и через выводы 5, 7 соединяют с внешней цепью. В стальной крышке 8 расположены пробки 6, в которых устроены небольшие отверстия для вентиляции. Изоляция пластин одна от другой и от корпуса достигается установкой распорных эбонитовых палочек 2 и эбонитовых пластин 13 со стойками 14. У кадмиево-никелевых аккумуляторов крайние пластины всегда положительные, у железоникелевых отрицательные. При сборе в батарею аккумуляторы монтируют на изоляционных прокладках в общем деревянном или пластмассовом ящике и надежно изолируют от корпуса судна.
Электролитом служит раствор едкого кали КОН или натра NaOH (плотность 1,19-1,21 г/см3) в дистиллированной воде с небольшой добавкой едкого лития LiOH, который увеличивает срок службы аккумуляторов в 2-2,5 раза.
Реакции разряда-заряда (на примере кадмиево-никелевого аккумулятора) следующие:
- у положительных пластин Ni(OH)3 + К «Ni(OH)2 + КОН;
- у отрицательных пластин Cd+2OH«Cd(OH)2.
Образовавшиеся при разряде гидроокиси Ni(OH)2 и Cd(OH)2 не обладают какими-либо отрицательными свойствами, поэтому щелочные аккумуляторы могут длительное время находиться в разряженном состоянии, следовательно, их обслуживание упрощается.
Так как ионы К+ и ОН- или целые молекулы КОН присутствуют в левых и правых частях уравнений реакций, плотность электролита в процессе разряда-заряда почти не изменяется. ЭДС заряженного аккумулятора составляет 1,35 В, при разряде уменьшается до 1 В (зависит от состояния активных масс пластин и в меньшей степени от плотности электролита и температуры эксплуатации). Напряжение заряженного аккумулятора составляет 1,25 В, разряжают его до напряжения не ниже 1,1В. Например, батарея 10 КН-100 (кадмиево-никелевая батарея, собранная из 10 банок, общей емкостью 100 А×ч) имеет номинальное напряжение Uном = 12,5 В. Рекомендованы 6-часовой режим заряда током 25 А (1/4 емкости) и 8-часовой режим разряда током 12,5 А (1/8 емкости). Допускается 1-часовой режим разряда током 100 А.
Внутреннее сопротивление щелочных аккумуляторов, составляющее 0,03-0,05 Ом, сравнительно высоко, поэтому их нельзя использовать в стартерном режиме.
Рекомендуется поддерживать уровень электролита выше верхнего края пластин на 5 – 12 мм.
Завод-изготовитель рекомендует 6-часовой режим заряда аккумуляторов током, равным 1/4 емкости.
В начале заряда напряжение аккумулятора составляет 1,4-1,45 В, в конце - 1,75-1,95 В. Конец заряда характеризуется бурным газовыделением и постоянством ЭДС аккумулятора.
Рекомендуется не реже одного раза в 6 месяцев разрядить аккумуляторы током 6-ти часового разряда до напряжения от 1,1 В до 1,2 В на элемент, после чего дать аккумуляторам усиленный заряд. Усиленный заряд выполняется 10-12 часов током нормального заряда.
5. Особливості вбудованих таймерів управляючих мікроконтролерів.
В состав цифровых периферийных устройств микроконтроллеров управляющих систем входят несколько счётчиков/таймеров. Два из которых совместимы со счетчиками/таймерами стандартною МК 8051. а три оставшихся - это 16-битные таймеры с автоперезарузкой, которые можно использовать совместно с аналого-цифровыми преобразователями, контроллерами последовательных интерфейсов или как таймеры общего назначения.
Они могут быть использованы для измерения временных интервалов, счета внешних событий или генерирования периодических прерываний. Каждый из таймеров может работать в нескольких режимах.
В режиме таймера каждый из таймеров производит инкремент своих регистров на каждый импульс синхронизации таймера.
В режиме счета внешних событий инкремент регистра таймера происходит в
момент отрицательного перепада напряжения на выбранном входе. Сигнал событий может быть непериодическим, однако для надежного распознавания событий должен удерживаться на каждом из уровней, по меньшей мере, в течение двух периодов системной синхронизации. Такой подход позволяет отфильтровывать случайные выбросы сигнала, практически всегда присутствующие на выводах микросхем.
16 разрядный таймер/счётчик может функционировать в трех режимах: режиме 16-битного таймера/счетчика с захватом, режиме 16-битного таймера/счетчика с автозагрузкой или режиме генератора последовательной скорости.
В дополнение к стандартным таймерам/счетчикам, современные микроконтроллеры имеют еще один оригинальный узел - программируемый массив-счетчик - PCA (Programmable Counter/Timer Array). Он состоит из специализированного шестнадцатибитного таймера/счетчика с времязадающим узлом и пятью модулями захвата / сравнения - CCM (Capture/Compare Module). Времязадающий узел может подавать на вход PCA одну из следующих частот:
· системную частоту тактирования, деленную на определённый коэффициент;
· выход переполнения одного из таймеров;
· внешний счетный вход - ECI (External Clock Input).
Каждый из пяти модулей захвата / сравнения CCM может быть запрограммирован на выполнение одной из четырех функций:
· переключаемая по фронту защелка;
· программный счетчик;
· высокоскоростной выход;
· широтоимпульсный модулятор - PWM (Pulse Width Modulator).
Естественно, что внешний счетный вход и выходы модулей захвата / сравнения CCM могут поступать на необходимые выводы портов ввода/вывода или заданы, как источник прерывания. Кроме того, в некоторых из микроконтроллеров на базе расширенного PCA может быть реализован таймер реального времени - RTC (Real Time Clock)..
Билет 14
1. Нелинейные системы управления.
Под нелинейной системой понимают систему, которая описывается нелинейным дифференциальным уравнением или физически содержит хотя бы одно нелинейное звено.
К их числу относятся:
1) Нелинейность является значимой при работе системы в том случае, если временной интервал переключения реле находится в частотном диапазоне системы (рис.1.(6) и двигатели различных габаритов (двигатель постоянного тока или шаговый двигатель))
2) Нелинейным является также любое звено с кусочно-нелинейной характеристикой.
3) Нелинейным является звено с криволинейной характеристикой любого вида.
4) Нелинейным является звено, в котором существует перемножение переменных или их производных.
5) Нелинейным является звено с запаздыванием.
6) Нелинейным является звено импульсного типа (триггер, мультивибратор).
7) Нелинейным является логическое звено.
Отличие нелинейных звеньев от линейных.
1)Статическая характеристика в системе управления нелинейна хотя бы в одном звене.
2)Если хотя бы одно звено содержит произведение или деление переменных.
Система, содержащая первый признак, называется – статически нелинейной.
Система, содержащая второй признак, называется – динамически нелинейной.
Если статически нелинейную систему можно линеаризовать, то тогда ее можно с некоторым приближением считать линейной.
Если система нелинейна по второму признаку, то она не может быть представлена линейной системой, поскольку для динамических звеньев не существует статических характеристик, и все характеристики вытекают в виде семейства характеристик звена (нет однозначной зависимости между входом и выходом).
Нелинейные системы невозможно полностью представить как линейные, т.е. нельзя применить все достижения, позволяющие отыскать устойчивость системы, качества, преобразования Лапласа.
В нелинейных системах нарушается два основных принципа, по которым они отличаются от линейных систем:
1) Нарушается принцип суперпозиции:

Т.о. нарушение принципа суперпозиции исключает применение преобразования Лапласа, использование частотных характеристик в том смысле, в котором они применяются для линейных систем.
2) Нарушается принцип коммутативности:

Для нелинейной системы в структурной схеме переставлять местами нелинейные звенья нельзя:

Общий метод составления уравнений для нелинейных систем.
1)Линеаризация всех звеньев системы, где только это можно осуществить с достаточной точностью.
2)Выделение одного или двух нелинейных звеньев.
Процессы в нелинейных системах существенно отличаются от процессов в линейных системах. Вопросы устойчивости значительно сложнее, чем в линейных системах. Здесь нужно различать вопросы устойчивого состояния равновесия и вопросы устойчивости автоколебаний.
Рис.3 
Если значение входного воздействия находится в диапазоне  , то при таком возмущении система, в конце концов, приходит в состояние равновесия. Если же возмущающее воздействие превышает пределы
, то при таком возмущении система, в конце концов, приходит в состояние равновесия. Если же возмущающее воздействие превышает пределы  , то система становится неустойчивой (например, генератор синусоидальных сигналов) - (устойчивая в малом, но неустойчивая в большом система).
, то система становится неустойчивой (например, генератор синусоидальных сигналов) - (устойчивая в малом, но неустойчивая в большом система).
Любые отклонения регулируемой величины от установившегося состояния под действием возмущающего или какого-либо другого воздействия приводят к получению автоколебаний с амплитудой  (система неустойчивая в малом, но устойчивая в большом).
(система неустойчивая в малом, но устойчивая в большом).
2. Замена механической системы, в которой элементы с разными массами совершают вращательное и поступательное движения с разными скоростями, на один эквивалентный элемент (звено), движущийся с одной скоростью, называется п р и в е д е н и е м.
При работе подьёмника основная часть мощности от двигателя предаётся на грузовой барабан, но её незначительная часть теряется на трение в редукторе и преодоление сил инерции во всех устройствах электропривода.
Мощность на валу электродвигателя
Р  = ω М
= ω М  (2-3)
(2-3)
Мощность на валу механизма
Р  = ω
= ω  (2-4)
(2-4)
Мощности Р и Р связаны через коэффициент полезного действия передачи:
 η =
η =  (2-5)
(2-5)
Подставим в формулу (2-5) правые части формул (2-3) и (2-4):
η =  (2-6)
(2-6)
Из выражения (2-6) найдем статический момент  (2-7), это статический момент механизма
(2-7), это статический момент механизма  приведенный к скорости вращения вала электродвигателя –
приведенный к скорости вращения вала электродвигателя – 
=  =
=  ,(2-7),
,(2-7),
=  .
.
где: ί =  – передаточное число передачи (редуктора).
– передаточное число передачи (редуктора).
Момент электродвигателя в установившемся режиме уравновешивает статический момент , который выражается через статический момент производственного механизма М уравнением (2-7).[В.С.Алексеев Основы электропривода стр.5]
Таким образом статический момент механизма – М ,учитывая потери мощности кпд – η передачи и передаточное число редуктора – ί, привели к скорости вращения вала двигателя и получили приведенный к скорости вала двигателя статический момент механизма
.
Для подьёма груза с постоянной скоростью  электродвигатель должен развивать на валу момент равный по величине .
электродвигатель должен развивать на валу момент равный по величине .
Если между двигателем и механизмом имеется несколько передач с передаточными числами  ,
,  ,….,
,….,  и соответствующими КПД
и соответствующими КПД  ,
,  ,...,
,...,  , тостатический момент, приведенный к скорости вала двигателя, определяется формулой (2-8)
, тостатический момент, приведенный к скорости вала двигателя, определяется формулой (2-8)
 (2-8)
(2-8)
3. Эти насосы можно рассматривать как насосы с вращающимися поршнями, выгодно отличающиеся от поршневых отсутствием возвратно-поступательного движения. Как следствие этого, подача их равномерна, они не требуют установки воздушных колпаков, не имеют клапанов и допускают непосредственное соединение с двигателями, в частности, с электромотором.
4. Валогенераторные установки (ВГУ) в настоящее время находят широкое применение в составе СЭЭУ на большинстве судов современной постройки. Они обеспечивают отбор механической энергии от главного двигателя и преобразование этой энергии в электрическую.
В состав ВГУ входят: валогенератор (ВГ) с элементами привода, устройство стабилизации частоты вращения или частоты тока, система автоматического управления и регулирования, системы контроля, защиты и сигнализации, фильтрокомпенсирующие устройства. ВГ приводится в движение от главного двигателя (ГД).
Использование ВГУ в составе СЭЭУ позволяет снизить себестоимость вырабатываемой электроэнергии в среднем на 15…20% за счет снижения эксплуатационных затрат, снизить уровень шума и вибрации в машинном отделении.
Так как ВГ приводится в движение от главного двигателя, то для получения электроэнергии используется тяжелое дизельное топливо, стоимость которого ниже стоимости топлива, на котором работают дизель-генераторы. Кроме этого удельный расход топлива малооборотных дизелей, применяемых в качестве ГД, меньше удельного расхода среднеоборотных дизелей, применяемых в качестве приводных двигателей в ДГ.
Современные ВГУ могут работать параллельно со вспомогательными дизель-генераторами (ДГ), а также в двигательном режиме на гребной винт. Мощность современных ВГУ лежит в пределах от 100 кВт на речных и небольших морских судах до 3000 кВт и более на крупных рефрижераторных контейнеровозах.
ВГ может непосредственно располагаться на гребном валу или приводиться в движение от вспомогательного вала ГД, в некоторых типах ВГУ в приводе ВГ используется повышающий редуктор.
По способу стабилизации частоты в судовой сети ВГУ можно разделить на два типа:
- установки, где поддерживается постоянство частоты вращения валогенератора (nВГ = const);
- установки, где ВГ работает с переменной частотой вращения (nВГ = var), а частота электроэнергии в судовой сети стабилизируется с помощью преобразователей электроэнергии.
В первом случае поддержание постоянства частоты вращения ВГ осуществляется за счет постоянства частоты вращения ГД (на судах с ВРШ) или с помощью дополнительных стабилизирующих устройств, к которым относятся планетарные передачи, электромагнитные муфты скольжения, гидравлические системы стабилизации.
Во втором случае частота вращения ВГ изменяется в широком диапазоне, а стабилизация электрических параметров вырабатываемой электроэнергии осуществляется при помощи преобразователей электроэнергии.








