 2015-07-14
2015-07-14 5094
5094В первых зубчатых передачах зацепление между колесами осуществлялось с помощью стержней, которые врезались в обод колеса радиально или
параллельно оси вращения. Однако такая простейшая форма зубьев не обеспечивала непрерывный контакт сопряженных колес при их вращении. Это проявлялось в неравномерности вращения ведомого колеса, его остановках в некоторых положениях при работе передачи. Зубья в виде стержней, при передаче движения от одного колеса к другому, испытывали ударные нагрузки, что приводило к быстрому выходу их из строя вследствие поломок. Эти недостатки стали серьезным препятствием применения зубчатых передач в часовых механизмах и других машинах.
Во второй половине Х1Х века Робертом Виллисом была сформулирована и доказана основная теорема (основной закон) зубчатого зацепления, устанавливающая связь между скоростями вращения колес и их геометрическими параметрами.
Простейшая зубчатая передача представляет собой трехзвенныймеханизм (рис.6.9), состоящий из двух подвижных звеньев (зубчатых колес), образующих с неподвижным звеном две низшие кинематические пары 5-го класса О1 и О2 и одну высшую кинематическую пару 4-го класса К между 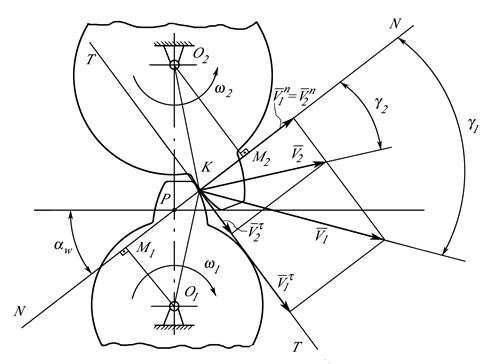
Рис. 6.9.
собой. Высшая кинематическая пара К собственно и представляет собой зацепление выступов (зубьев) подвижных звеньев I и 2.
Движение передаётся давлением боковой поверхности зуба ведущего звена I на боковую поверхность зуба ведомого звена 2. Звенья вращаются вокруг осейО1 и О2. Пусть соприкасающиеся между собой точки К1 звена I и К2 звена 2 не лежат на линии центров О1О2. Вектор скорости V1 точки К1 перпендикулярен прямой О1К, соединяющей К1 с центром вращения, а вектор скорости V2 точки К2, перпендикулярен прямой О 2 К.
В точке контакта К профили имеют общую нормаль NN и общую касательную ТТ. Разложим векторы скоростей v1 и v2 на составляющие по нормали и по касательной, соответственно обозначив их v1n, v2n и v1τ, v2τ. Естественное условие непрерывности контакта профилей может быть выражено равенством
v1n = v2n (6.1) так как в противном случае зубья внедрялись бы друг в друга или расходились бы.
При этом, во всех случаях кроме одного, когда точка касания находится на линии О1О2, выполняется неравенство
v1τ  v2τ (6.2)
v2τ (6.2)
что свидетельствует об относительном скольжении профилей.
Обозначив углы между векторами скоростей v1 и v2 и нормалью NN соответственно через  1 и 2 получим
1 и 2 получим
v1n = v1cos 1 =  1* О1К* cos 1
1* О1К* cos 1
v2n = v2cos 2= 2*О2К*cos 2 (6.3.)
где 1 и 2- угловые скорости вращения звеньев.
Опустимиз центров вращения О1 и О2, перпендикуляры на нормаль NN. Рассмотрим получившиеся треугольники О1М1К и О2М2К. Уних
 КО1М1= 1 и 1М1 = О1К* cos 1,
КО1М1= 1 и 1М1 = О1К* cos 1,
КО2М2= 2 и О2М2 = О2К* cos 2.
Подставив эти значения в выражение (6.3) и учитывая (6.1), получим
1/ 2= О2М2 / О1М1 (6.4)
где i12 = 1 / 2 - передаточное отношение, принятое в качестве основного кинематического параметра передаточногомеханизма.
Обозначим Р точку пересечения общей нормали NN с линией центров О1О2. Эта точка является мгновенным центром относительного вращения звеньев и получила название полюса зацепления.
Из подобия треугольников О1М1Р и О2М2Р следует
О2М2/О1М1=О2Р/О1Р (6.5.)
Таким образом, учитывая (1.4) и (1.5), можно записать
i12 =  1 / 2 = О2Р/О1Р (6.6)
1 / 2 = О2Р/О1Р (6.6)
где знак "+" принимается для внутреннего зацепления, не меняющего направления вращения, и знак "-" для внешнего зацепления, изменяющего направление вращения.
Выражение (6.6) является математической трактовкой основной теоремы зацепления (теоремы Виллиса), которая формулируется:
Для сохранения непрерывного контакта профилей зацепления необходимо, чтобы общая нормаль к профилям, проведенная через точку их касания, делила межцентровое расстояние на части, обратно пропорциональные угловым скоростям.
Из основной теоремы зацепления формулируются два основных следствия.
Если i12 =const, то полюс зацепления Р не должен менять своего положения на линии центров О1О2. Центроидами* относительного движения звеньев в этом случае являются окружности радиусов rw1= О1Р и rw2= О2Р, называемые начальными окружностями.
Если i12 const, соотношение между величинами отрезков О1Р и О2Р, а следовательно, и положение полюса Р определяется заданной функцией
i12 = f(j1),
где  1 - угол поворота ведущего звена. Центроиды в этом случае представляют собой кривые, отличные от окружностей.
1 - угол поворота ведущего звена. Центроиды в этом случае представляют собой кривые, отличные от окружностей.
Угол между общей к профилям зубьев нормалью и прямой, перпендикулярной линии центров в полюсе зацепления, называется углом зацепления  tw.
tw.
В полюсе зацепления Р скольжение сопряженных профилей отсутствует. По мере удаления точки К контакта зубьев полинии зацепления от полюса скорость vск. скольжения возрастает:
vск = КР(ω1 ω2 ) (6.7.)
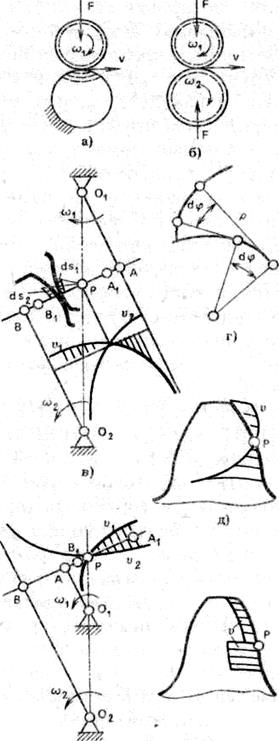
Установлено, что отношение скорости скольжения к линейной скорости точки рассматриваемого звена в направлении скольжения (vск /v1 или vск /v2)
характеризует износ этого звена в данной точке. Для неподвижного ролика (рис.6.10а) vск /v2 ® ¥ и, соответственно, износ его несоизмеримо больше износа подвижного ролика. Отношение vск/v1 или vск/v2 называется коэффициентом удельного скольжения. Его обозначают  с соответствующими индексами (1- для 1 колеса, 2- для второго колеса).
с соответствующими индексами (1- для 1 колеса, 2- для второго колеса).
_______
*Центроида - геометрическое место мгновенных центров скоростей звеньев в их относительном движении.
 Учитывая, что скорость скольжения определяется как разность скоростей соприкасаемых точек,
Учитывая, что скорость скольжения определяется как разность скоростей соприкасаемых точек,
1 =(v1-v2)/v1 2 =(v2-v1)/v2
или
1= (ds1-ds2)/ds1
2=(ds2-ds1)/ds2 (6.8)
где ds1 и ds2 — элементарные участки пути точки соответственно контактапо профилям первого и второго зубьев при повороте колес на углы dj1и dj 2, связанные передаточнымотношением ι12 = dj1/ dj 2.
С учетом свойств эвольвенты (рис.6.10 г) можно записать ds =  * dj, где
* dj, где  - радиус кривизны эвольвенты.
- радиус кривизны эвольвенты.
С учетом этого выражения примут вид:
1= 1-(  2d
2d  2/ 1d 1)
2/ 1d 1)
2= 1-( 1d 1/ 2d 2) ( 6.9)
Графики коэффициентов удельных скольжений 1 и 2, построенные по данным зависимостям, представлены на линии зацепления на рис.6.10 в. При перемещении точки контакта от точки А до точки В 1 изменяется от - ∞ до 1, а 2 - от 1 до - ∞.
В реальной передаче, поскольку точка контакта перемещаетсявпределах активной части линии зацепления А1В1, коэффициенты удельных скольжений имеют конечные значения.
Рис.6.10
Графики можно представить на профиле зуба (рис.6.10 д). Значение у ножки зуба больше, чем у вершины. Этим объясняется большая интенсивность износа поверхности у ножки зуба.
Путем выбора параметров передачиможно уменьшить, увеличить, переместить активную часть линии зацепления, а также изменить величины коэффициентов удельных скольжений — сделать, например, иходинаковыми у ножек зубьев обоих взаимодействующих колес.
С учетом того, что зуб колеса участвует в зацеплении меньшее число раз. чемзуб шестерни, целесообразно сопостовлять величины 1 и 2 / i12. Это имеет особое значение при большихпередаточных отношениях.
Для внутреннего зацепления графики коэффициентов удельных скольжений даны на рис.6.10 е
Удельные скольжения для циклоидального зацепления представлены на профиле зуба на рис.6.10 ж.
Учитывая, что износ контактируемых поверхностей является функцией скорости скольжения, при конструировании передачи необходимо выбрать такое расположение сопряженных профилей относительно центроид, чтобы скорость скольжения находилась в допустимых пределах.
Наиболее распространенными профилями являются профили, расположенные по обе стороны от центроиды, т.е.имеющие головку и ножку зуба.
В настоящее время используется ряд зубчатых передач, отвечающих требованиям основной теоремы зубчатого зацепления. Кним относятся эвольвентные, циклоидальные, часовые, цевочные, зацепление Новикова.
Вопросы для самоконтроля:
1. В чём сущность основной теоремы зубчатого зацепления '?
2. Что такое полюс зацепления?
3. Какой угол называется углом зацепления?
4. Какая окружность называется начальной окружностью?
5. Что является центроидами относительного движения колес при постоянном передаточном отношении?
6. Происходит ли проскальзывание сопряженных профилейзубьев:
в полюсе зацепления, в точках контакта,не совпадающих с полюсом
7. От чего зависит скорость относительного скольжениясопряженныхпрофилей?
8. На какой параметр работоспособности передачи влияетвеличинаскорости скольжения?
9. Какие форды профиля зубьев отвечают основнойтеореме зубчатого
зацепления?

