 2015-08-21
2015-08-21 1302
1302Компенсаторы высоты служат для подъема расцепленных вагонеток на высоту, необходимую для обеспечения самокатного движения вагонеток. Высота подъема Н определяется размером «потерянной» высоты, связанной с движением вагонеток под уклон в пределах околоствольного двора.
Компенсаторы высоты могут быть непрерывного и циклического действия.
Компенсаторы высоты непрерывного действия обычно с цепным тяговым органом, замкнутым в вертикальной плоскости на приводной и натяжной звездочках. Компенсаторы высоты периодического действия выполняются в виде подъемника с кривошипно-шатунным приводом (радиус кривошипа равен половине высоты подъема).
Расчетная производительность цепного компенсатора непрерывного действия (рис.38) определяется известным (заданным) количеством n в поднимаемых вагонеток за час работы.
Расстояние между вагонетками на компенсаторе (в метрах):
 ,
,
где v ц – скорость движения тяговой цепи компенсатора, м/с.
| а |
| l |
| v ц |
| b |

| gG в |
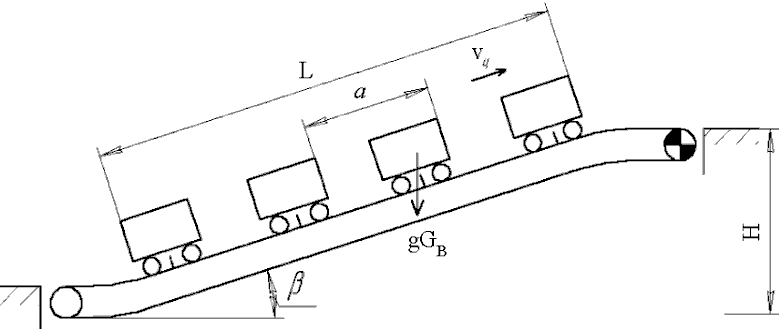
Рис.38. Расчетная схема компенсатора высоты
Число одновременно находящихся на компенсаторе вагонеток Z = L / a, где L = H /sinβ; здесь Н – требуемая высота подъема вагонеток, м; β – угол наклона компенсатора к горизонту.
Из условия продольной устойчивости вагонеток принимают β ≤ 15÷20º.
Тяговое усилие на валу приводной звездочки компенсатора (в килоньютонах)
 ,
,
где K – коэффициент, учитывающий дополнительные сопротивления движению на звездочках, а также в направляющих от давления кулаков (см. п.4.3.2), K = 1,2÷1,3; q ц – линейная масса тяговой цепи, кг/м; w ¢ – коэффициент сопротивления движению вагонеток по рельсовому пути (при G в = G 0 + G w ' =  ; при G в = G 0 w =
; при G в = G 0 w =  );
);  – коэффициент сопротивления движению цепи,
– коэффициент сопротивления движению цепи,  = 0,13÷0,15; L ц – длина цепного контура, м, L ц @ 2,25 L; L – длина наклонного участка компенсатора, м.
= 0,13÷0,15; L ц – длина цепного контура, м, L ц @ 2,25 L; L – длина наклонного участка компенсатора, м.
Мощность двигателя привода
 ,
,
где v ц  0,3 м/с.
0,3 м/с.
Двигатель привода компенсатора выбирается так же, как и для подвагонных цепей.

