 2015-08-13
2015-08-13 860
860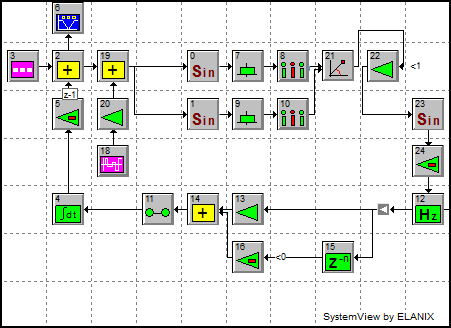
Рис. 2.1
На рис. 2.1 изображена схема системы ЦФАП, представленная в программе SystemView. Рис. 2.1 соответствует структурной схеме рис. 1.3. В состав схемы на рис.2.1 входят следующие блоки: источник (3),вырабатывающий фазу сигнала  ; генератор случайной фазы
; генератор случайной фазы  , состоящий из блоков (18),(20); сумматоры (2),(19); блоки
, состоящий из блоков (18),(20); сумматоры (2),(19); блоки  (0),(1).
(0),(1).
При моделировании принято, что  =1,
=1,  =1; шумы
=1; шумы  . В блоках (7),(9) реализованы согласованные фильтры с коэффициентами передачи
. В блоках (7),(9) реализованы согласованные фильтры с коэффициентами передачи  . Дискретным элементам на рис. 1.3 соответствуют дециматоры (8),(10). Коэффициент децимации (прореживания) установлен равным 20. Это связано с тем, что символьная частота 1/
. Дискретным элементам на рис. 1.3 соответствуют дециматоры (8),(10). Коэффициент децимации (прореживания) установлен равным 20. Это связано с тем, что символьная частота 1/  , а частота дискретизации при моделировании в SystemView выбрана в 20 раз больше, т.е.
, а частота дискретизации при моделировании в SystemView выбрана в 20 раз больше, т.е.  =192 кГц.
=192 кГц.
Функциональный преобразователь ФП (рис. 1.3) реализован в блоках (21),(22),(23),(24). В блоке (21) вычисляется фаза  (1.17), которая умножается на M в блоке (22). Затем рассчитывается
(1.17), которая умножается на M в блоке (22). Затем рассчитывается  в блоке (23) и осуществляется умножение на
в блоке (23) и осуществляется умножение на  (см. (1.17)) в блоке (24).
(см. (1.17)) в блоке (24).
Цифровой фильтр с передаточной функцией (1.25) реализован в блоках (12),(13),(14),(15),(16). Параметры ЦФ а, a+b установлены такими (см. раздел 1.2), что эквивалентная шумовая полоса ЦФАП  . Цифровой синтезатор частоты, содержащий импульсный элемент, экстраполятор и интегратор (см. рис. 1.3) реализован в блоках (11),(4),(5).
. Цифровой синтезатор частоты, содержащий импульсный элемент, экстраполятор и интегратор (см. рис. 1.3) реализован в блоках (11),(4),(5).
Проведём моделирование системы ЦФАП с сигналом ФМ-4. Устанавливаем в блоке (3) линейное воздействие по фазе  . Начальная ошибка по частоте Ω = 1
. Начальная ошибка по частоте Ω = 1  . Ошибка слежения ЦФАП изображена на рис. 2.2. Она близка к теоретической зависимости
. Ошибка слежения ЦФАП изображена на рис. 2.2. Она близка к теоретической зависимости  , показанной на рис. 1.6.
, показанной на рис. 1.6.
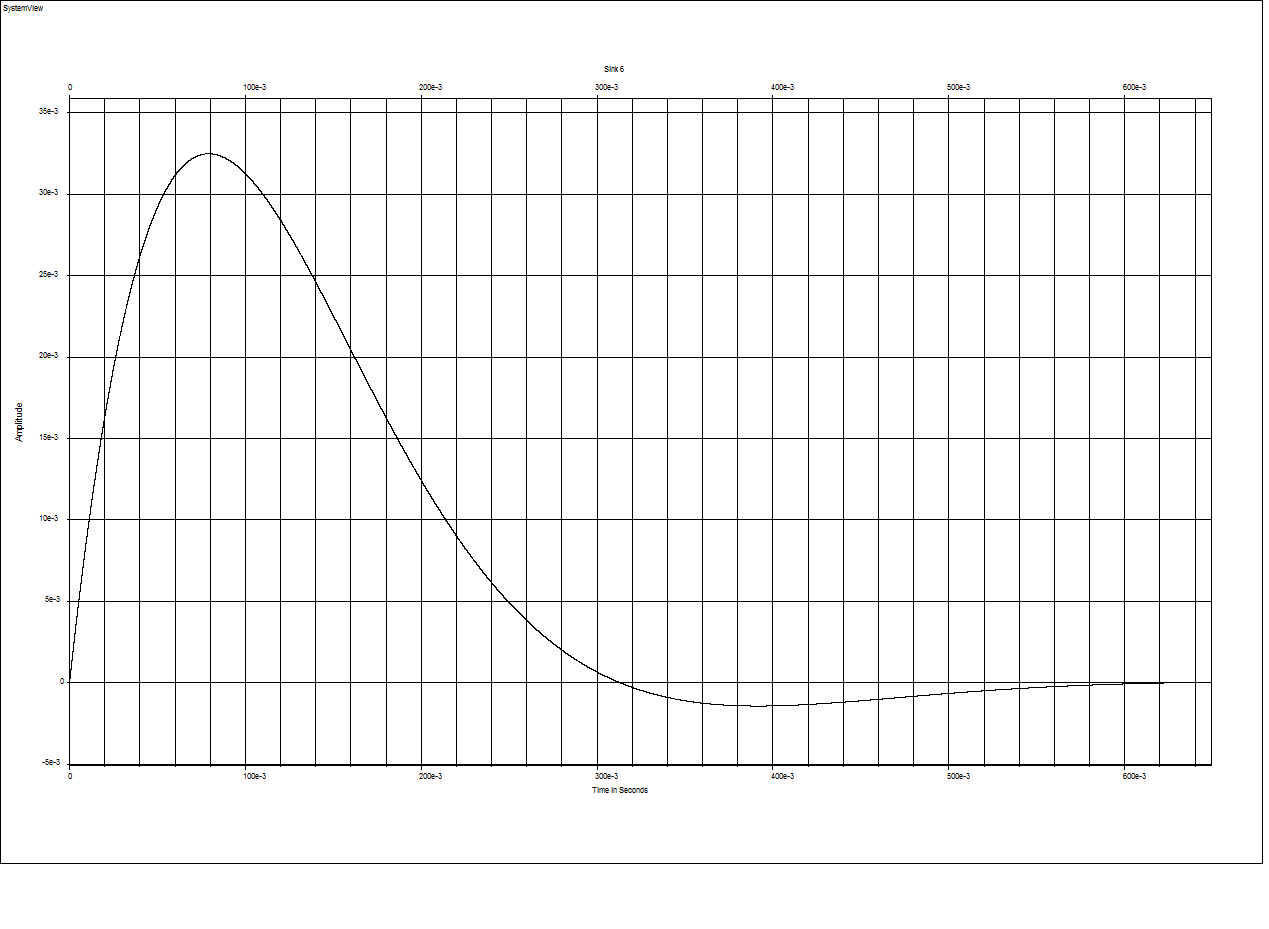
Рис. 2.2
Установим в блоке (3) начальную ошибку по частоте Ω = 5 . График процесса изображён на рис. 2.3.
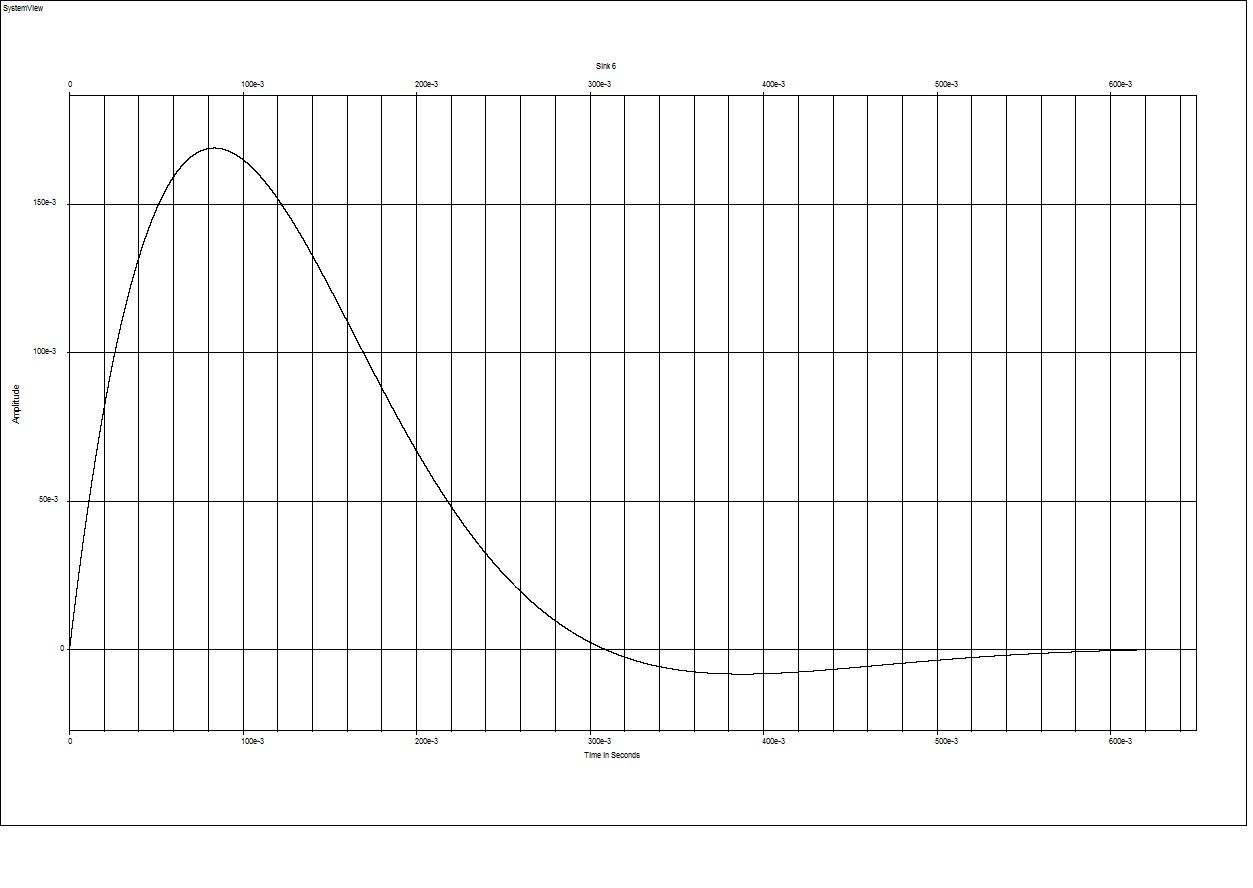
Рис. 2.3
Можно заметить, что начинает сказываться нелинейность дискриминационной характеристики системы ЦФАП.
При дальнейшем увеличении начальной ошибки по частоте (Ω =11 ), получаем следующий график ошибки слежения, изображённый на рис. 2.4
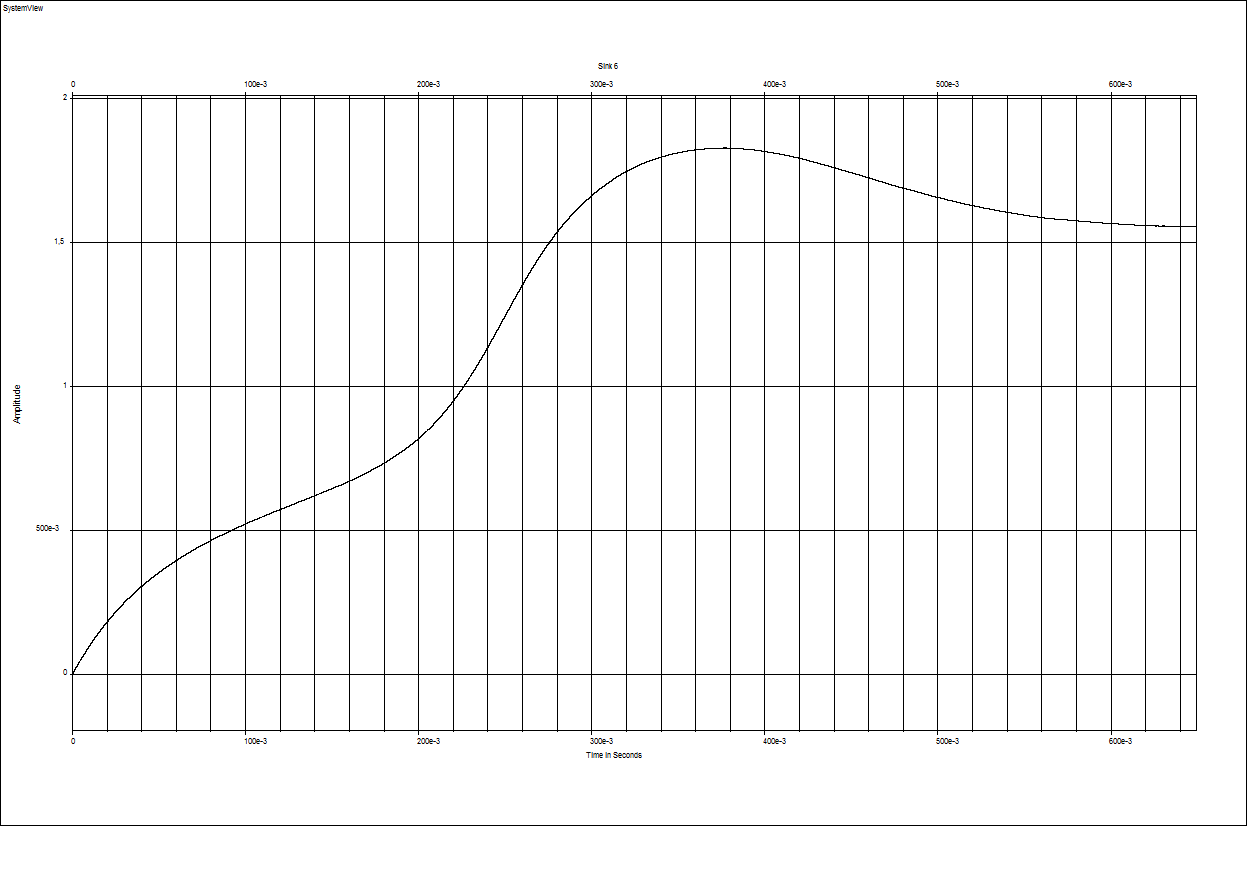
Рис. 2.4
Установившееся значение ошибки слежения ЦФАП (рис. 2.4) равно уже не нулю, а n  , где n – целое число, что говорит о том, что система работает на нелинейном участке дискриминационной характеристики при большом воздействии.
, где n – целое число, что говорит о том, что система работает на нелинейном участке дискриминационной характеристики при большом воздействии.
Если выбрать начальную ошибку по частоте равной Ω = 50 , то ЦФАП практически разомкнута. Ошибка слежения ЦФАП изображена на рис. 2.5.
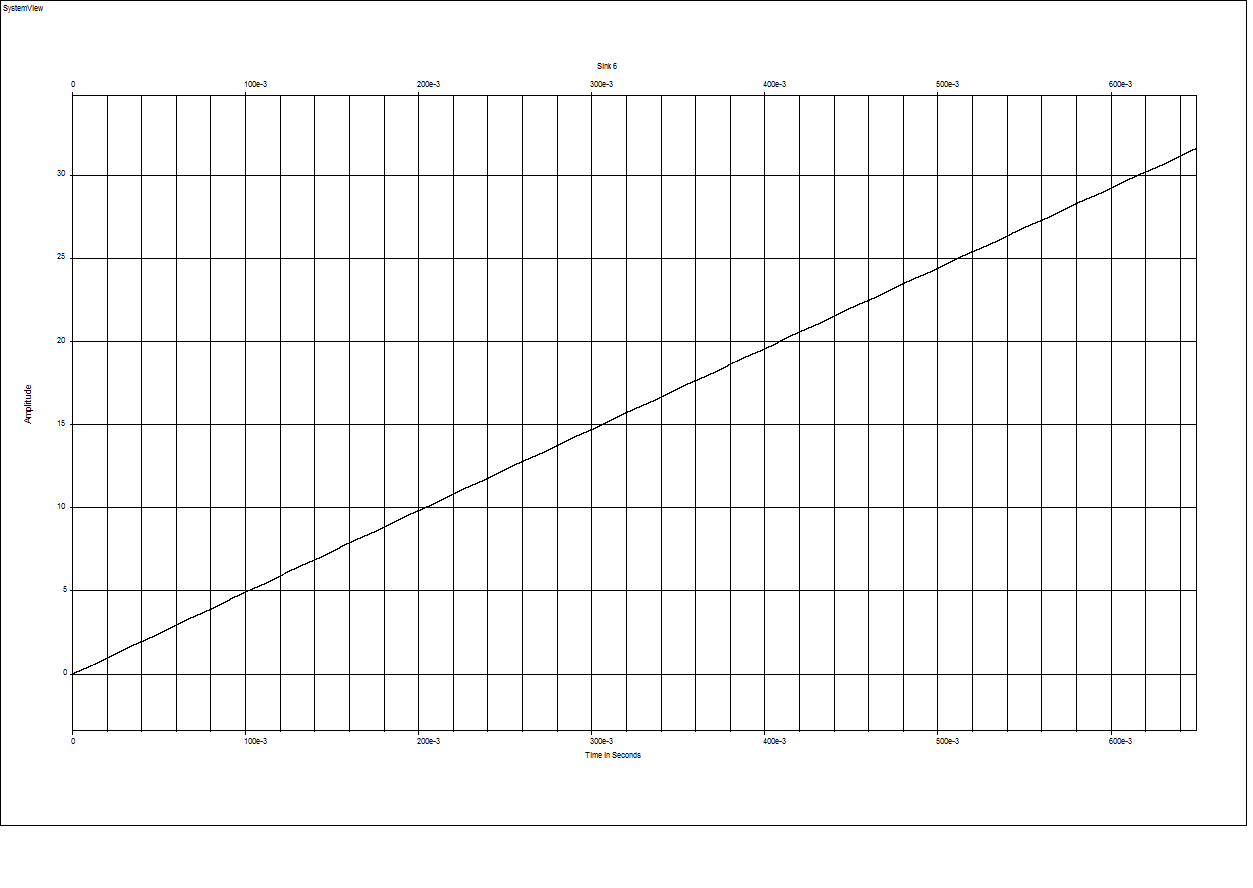
Рис. 2.5
Проведём моделирование системы ЦФАП с сигналом ФМ-8. Устанавливаем в блоке (3) линейное воздействие по фазе . Начальная ошибка по частоте Ω = 1 . Ошибка слежения ЦФАП изображена на рис. 2.6. Она близка к теоретической зависимости , показанной на рис. 1.6.
Рис. 2.6
Установим в блоке (3) начальную ошибку по частоте Ω = 5 . График процесса изображён на рис. 2.7.
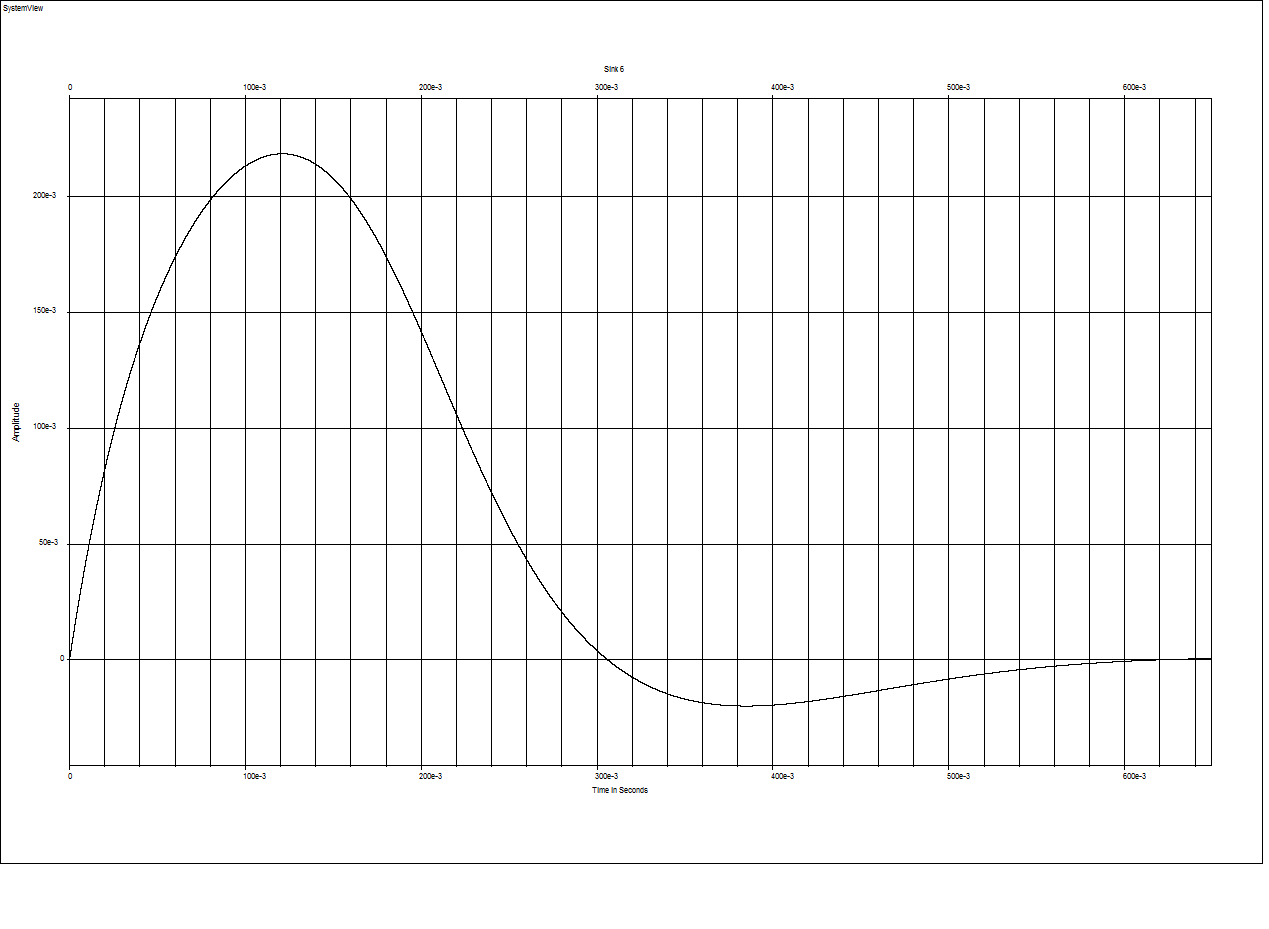
Рис. 2.7
Можно заметить, что нелинейность дискриминационной характеристики системы ЦФАП начинает сказываться быстрее, чем у сигнала ФМ-4.
При дальнейшем увеличении начальной ошибки по частоте (Ω =6 ), получаем следующий график ошибки слежения, изображённый на рис. 2.8.
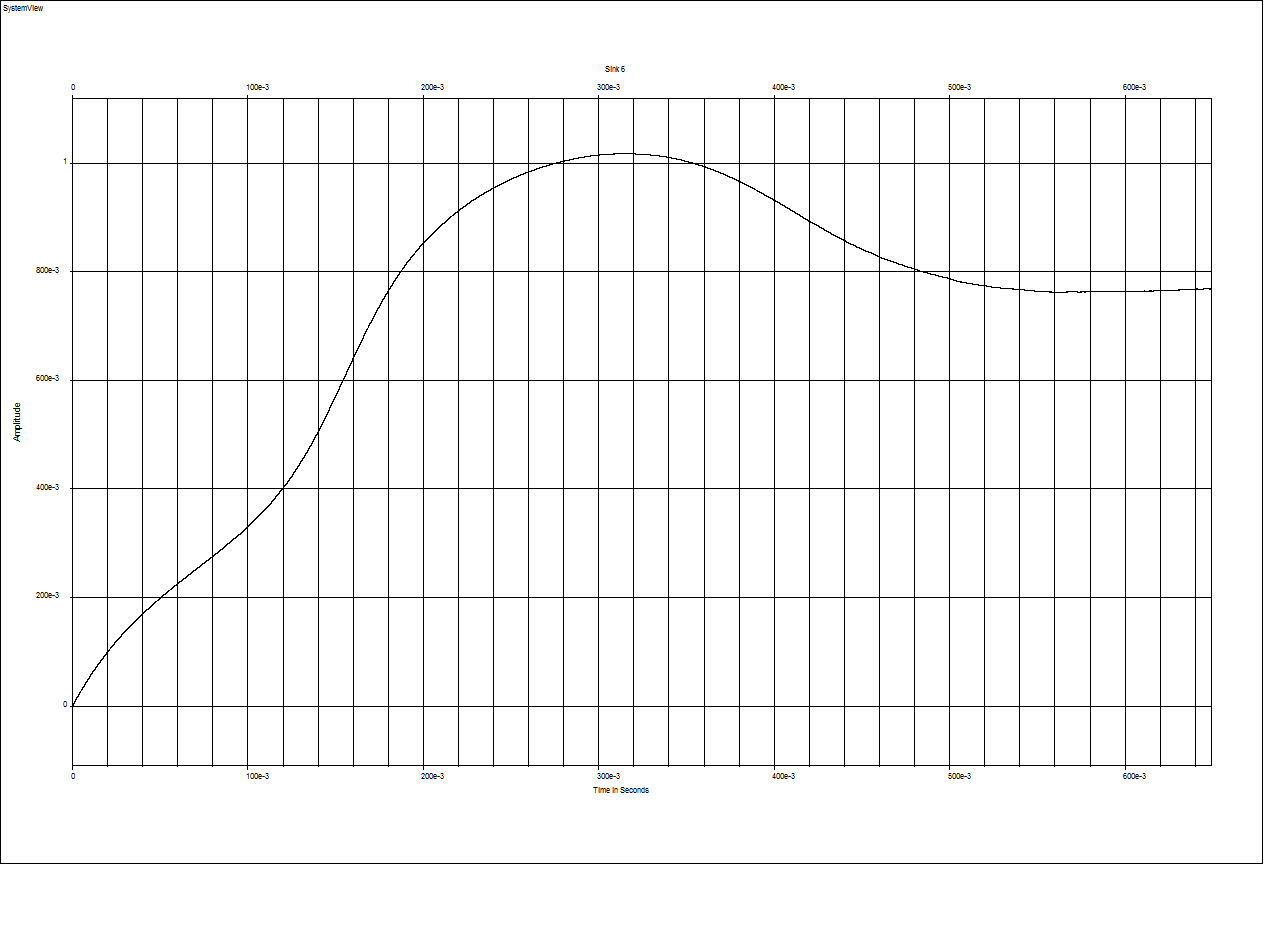
Рис. 2.8
Установившееся значение ошибки слежения ЦФАП (рис. 2.8) равно уже не нулю, а n  , где n – целое число, что говорит о том, что система работает на нелинейном участке дискриминационной характеристики при большом воздействии.
, где n – целое число, что говорит о том, что система работает на нелинейном участке дискриминационной характеристики при большом воздействии.
Если выбрать начальную ошибку по частоте равной Ω = 20 , то ЦФАП практически разомкнута. Ошибка слежения ЦФАП изображена на рис. 2.9.
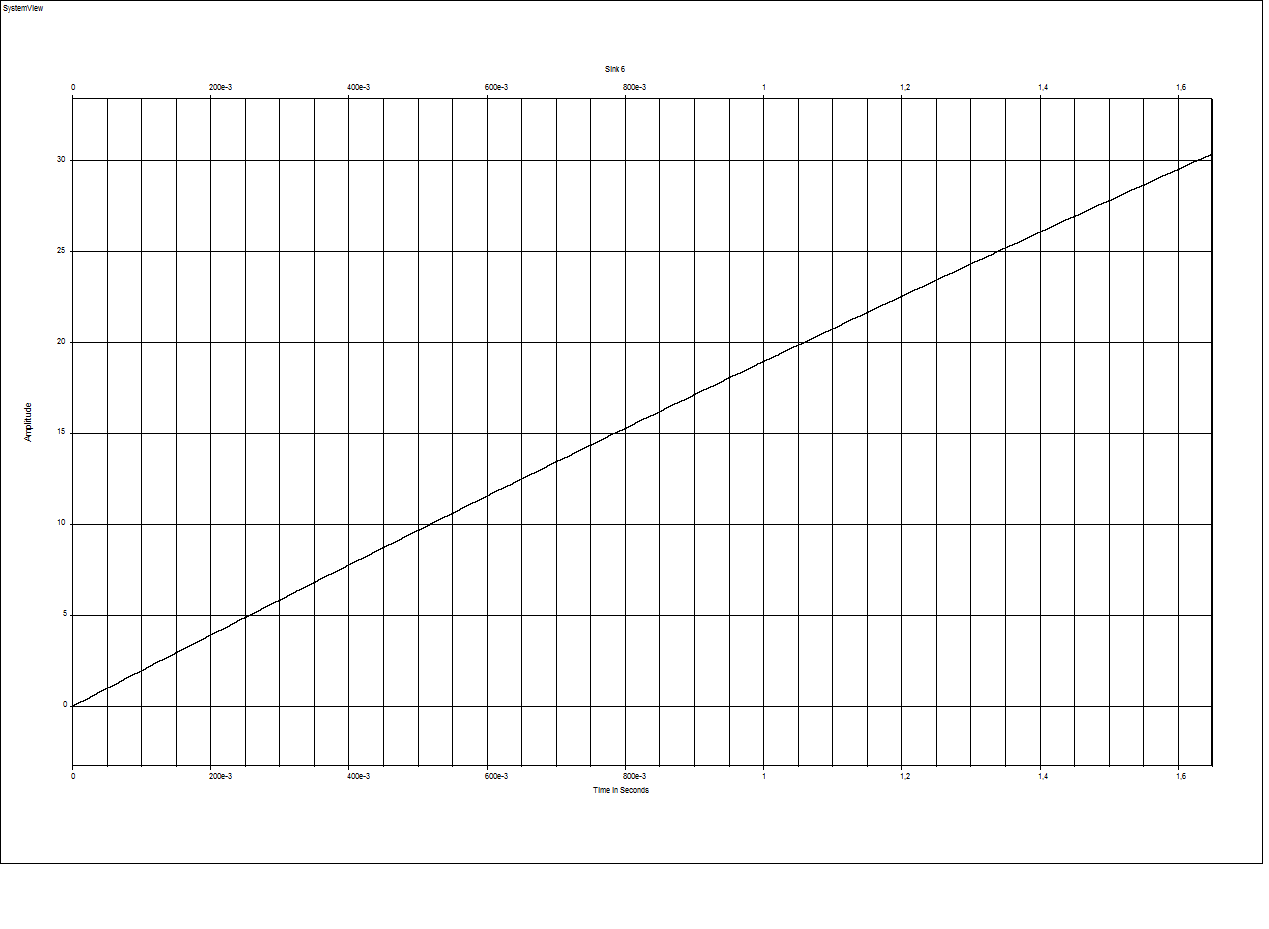
Рис. 2.9
Моделирование в программе SystemView чётко показало, что при работе по сигналу ФМ-8 система ЦФАП выходит на нелинейный участок дискриминационной характеристики при меньших начальных ошибках по частоте Ω, чем при работе по сигналу ФМ-4.
Это объясняется видом дискриминационных характеристик (1.23), приведённых на рис. 2.10.
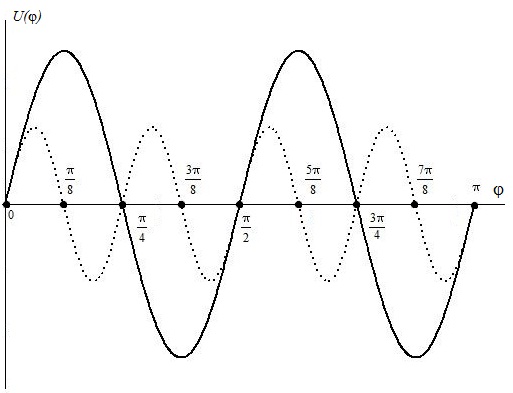
Рис. 2.10
На рис. 2.10 сплошной линией показана характеристика при М=4, а пунктирной линией – при М=8.
Заключение
Сформулируем выводы по работе:
1. Для сигнала ФМ-М выбрана по литературе функциональная схема системы восстановления несущей на основе системы цифровой ФАП.
2. Составлена структурная схема системы ЦФАП.
3. Выполнен анализ линеаризованной схемы системы ЦФАП; выбрана передаточная функция цифрового ФНЧ и оптимизированы параметры системы.
4. Освоено моделирование в программе SystemView и отлажена модель ЦФАП.
5. Проведено моделирование системы ЦФАП и получены графики переходных процессов для сигналов ФМ-4 и ФМ-8.
Литература
1. Y.Linn «Robust M-PSK phase detectors for carrier synchronization PLLs in coherent receivers: theory and simulations», IEEE Trans. Commun., 2009, №6.
2. Чиликин В.М. Анализ системы цифровой фазовой автоподстройки. Лабораторная работа №1. Мет. пособие.-М.:Издательство МЭИ,2003.








