 2015-08-13
2015-08-13 5071
5071Любой ремонт в скважине сопровождается подъемом и спуском труб, а в глубиннонасосных скважинах также и штанг. Работы по подъему и спуску труб и штанг в скважину называют с п у с к о -подъемными операциями.
В зависимости от характера подземного ремонта спуско-подъем-ные операции занимают от 40 до 80% всего затрачиваемого на ремонт времени, т. е. практически они определяют общую продолжительность подземного ремонта.
Трубы из скважины поднимают после снятия устьевой арматуры. При ремонте же глубиннонасосной скважины сначала отсоединяют верхнюю штангу (сальниковый шток) от станка-качалки и отводят в сторону головку балансира.
При ручном свинчивании и развинчивании трубы поднимают в такой последовательности. Всю колонну спущенных в скважину труб подвешивают на крюке при помощи элеватора, который поддерживает колонну труб за муфту. После того как трубы подняты на некоторую высоту и муфта второй трубы показалась над устьем скважины, под эту муфту подкладывают второй элеватор, который удерживает трубы от падения в скважину при отвинчивании первой трубы. Отвинченную трубу кладут на мостки перед вышкой, после чего процесс
подъема труб возобновляется и операции по отвинчиванию труб повторяются. Спускают трубы в скважину в обратном порядке.
При ремонте скважин, эксплуатируемых штанговыми насосными установками, спускают и поднимают кроме насосно-компрессорных труб и насосные штанги. Эти работы выполняют так же, как и при
 |
спуске и подъеме труб, но с применением штанговых элеваторов и штанговых ключей.
При спуско-подъемных работах наиболее трудоемкими операциями являются перенос элеваторов с мостков к устью скважины, а также свинчивание и развинчивание труб и штанг.
С целью облегчения основ
ных трудоемких процессов при
спуско-подъемных работах
Г. В. Молчанов разработал комплекс механизмов, который позволяет осуществлять следующие операции:
1) автоматический захват и
удержание колонны труб в спе
циальном клиновом захвате или
спайдере; при работе с одним
значительно облегченным эле
ватором последний постоянно
висит на крюке;
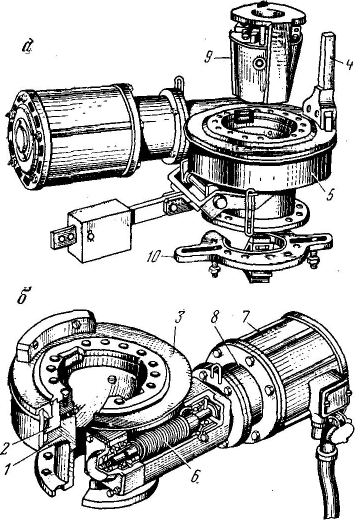
| Рис. 175. Автомат АПР для подземного ремонта скважин. а — автомат с центраторов; б — разрез автомат. |
2) механическое свинчивание
и развинчивание труб;
3) автоматическое ограниче
ние усилия свинчивания;
4) автоматическое^центриро-
вание колонны труб в скважине.
Комплекс механизмов АПР (автомат для подземного ремонта) состоит из следующих узлов и деталей: автомата для свинчивания и развинчивания труб, соединенного в одно целое со спайдером; одноштропного облегченного элеватора; трубного ключа; стопорного ключа; подкладной вилки; центратора, который служит для отжатия трубы до совпадения ее оси с осью скважины.
Автомат АПР (рис. 175) состоит из вращателя 3 с установленным на нем водилом 4 для вращения трубного ключа, который укреплен на отвинчиваемой или завинчиваемой трубе, и спайдера 9, удерживающего навесу колонну труб. Подъем и опускание плашек спайдера автоматизированы; они осуществляются движением трубы вверх или вниз.
При движении вверх труба, увлекая за собой плашки, несколько
приподнимает их, а под действием груза подвеска с плашками поднимается полностью и устанавливается в нерабочее положение.
При спуске трубы элеватор садится на подвеску и она вместе с плашками опускается. Когда плашки касаются трубы, она захва-
 |
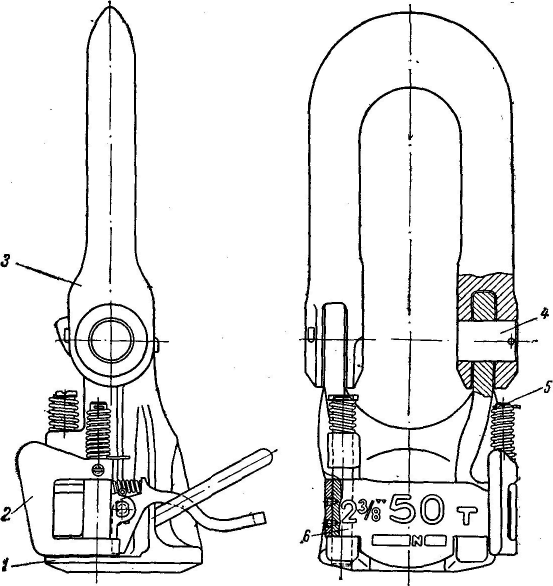
Рис. 176. Трубный элеватор ЭГ.
1 — корпус элеватора; г — защелка; з — штроп; 4 — палец; в — ось; 6 — створка.
тывается ими и заклинивается, а между нижней^плоскостью элеватора и верхней плоскостью подвески образуется зазор, что позволяет свободно снять элеватор с трубы.
Вращение водилу передается от электродвигателя 7 через червячную пару 6 и 2. Червячное колесо 2 свободно вращается на корпусе автомата 1 в кожухе 5, образующем масляную ванну. Между
автоматом и электродвигателем поставлена муфта ограничения момента вращения 8, отрегулированная на определенное усилие при свинчивании труб. Корпус автомата связан болтами с центратором 10.
Автомат управляется при помощи реверсивного трехполюсного заполненного маслом пускателя, устанавливаемого на массивной стойке. Пускатель соединяется кабелем через штепсель с электродвигателем и с промысловой силовой электросетью.
Элеватор (рис. 176) состоит из стального корпуса, внутренняя полость которого имеет выступающий бурт, являющийся опорой муфты насосной трубы, серьги, подвешиваемой на штроп или крюк, и запорного устройства.
Отличительной особенностью такого элеватора является его вы-'тянутая в вертикальной плоскости форма, что обеспечивает сокращение величины изгибающих усилий. Новая форма элеватора позволила значительно облегчить его при необходимой грузоподъемности. При одинаковых грузоподъемностях и запасах прочности масса такого элеватора в 2—3 раза меньше обычного.
При работе с автоматами АПР применяются трубные ключи Гипро-нефтемаша КТГ. Принцип действия такого ключа аналогичен принципу действия обычного шарнирного ключа. Его преимуществами являются небольшая масса и рациональная конструкция захвата, которая обеспечивает наименьшую порчу поверхности трубы.
Для механизации процессов свинчивания и развинчивания насосных штанг применяются штанговые ключи АШК и МШК (автоматические и механические ключи), принцип действия которых аналогичен автоматам АПР.
Для облегчения труда рабочих при проведении отдельных операций по подземному ремонту скважины используются различные приспособления малой механизации. К ним относятся направляющие воронки для труб и штанг, лотки или салазки для оттаскивания труб на мостки, вилки для подтаскивания труб, переносные столики для ручного инструмента и т. п.

