 2015-08-21
2015-08-21 4709
4709Методология анализа поверхности отклика полезна для реализации 3 типа вычислительного эксперимента, связанного с отысканием оптимальных условий.
Во многих случаях целью моделирования является отыскание таких величин или уровней независимых переменных, при которых отклик или зависимая переменная достигает оптимальных (максимальных или минимальных) значений. Если зависимая и независимая переменные количественны и непрерывны, то для решения задачи поиска оптимума обычно используется методология поверхности отклика (RSO), которая состоит в отыскании оптимальной комбинации уровней ^-количественных факторов.
Если обозначить зависимую переменную через у, а независимые переменные через (х 1, x 2,..., хk), где k — число факторов, и предположить, что все переменные количественны, непрерывны и измеримы, то уравнение поверхности отклика можно записать в следующем виде:
y=F(x1,x2,...,хk).
Очень полезно иметь геометрическое представление поверхности отклика. На рисунке 7.7.1 изображена поверхность отклика, изображающая зависимость отклика у от двух независимых переменных в прямоугольной системе координат.
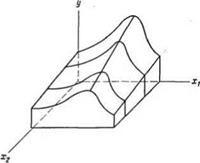
Рисунок 7.7.1 — Поверхность отклика
Другое полезное представление поверхности отклика можно получить, изображая на плоскости х 1 x2 проекции на нее линий постоянного отклика у = у 0, проведенных на поверхности отклика (контуры отклика). Ряд примеров подобных представлений приведен на рисунках 7.7.2, 7.7.3, 7.7.4, 7.7.5.
(Такое изображение поверхностей отклика аналогично изображению на топографических картах рельефа местности посредством контуров равной высоты или изображению на картах погоды изобар, показывающих распределение атмосферного давления на поверхности Земли.)
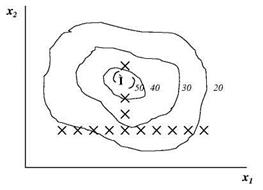
Рисунок 7.7.2 -Типичные контуры отклика: "Холм"
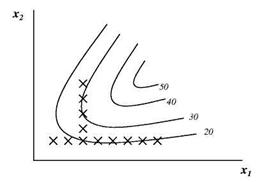
Рисунок 7.7.3 — Типичные контуры отклика: "Поднимающийся гребень"
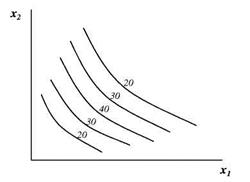
Рисунок 7.7.4 — Типичные контуры отклика:"Гребень постоянной высоты "
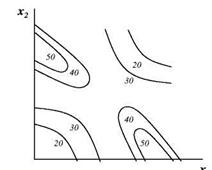
Рисунок 7.7.5 — Типичные контуры отклика: "Минимакс", или "Седло"
На рисунке 7.7.2. точка М - та оптимальная точка, которую мы ищем. Каждая линия соответствует постоянному значению параметра оптимизации и является проекцией сечений поверхности отклика на плоскость. Такая линия называется линией равного отклика.
Безусловно, геометрические представления поверхности отклика ограничены трехмерными изображениями. Однако геометрическое представление трехмерных поверхностей отклика вида y=f (x 1, x 2) помогает понять, что происходит в более общем случае — при k независимых переменных. Поэтому дальше мы ограничимся рассмотрением трехмерных поверхностей отклика.
Методология поверхности отклика обычно основана на исследовании поверхности отклика с помощью ряда небольших полных или неполных факторных экспериментов. В имитационном моделировании используется технология последовательного планирования. Такого рода последовательные планы используются в методологии анализа поверхности отклика (RSО), которая состоит в отыскании оптимальной комбинации уровней k количественных факторов, где реализуется пошаговая процедура движения к точке оптимума.
Сделаем небольшое пояснение. Если известно точное математическое выражение функции отклика, то отыскание оптимальной точки можно сравнительно просто осуществить аналитическими методами. Так как обычно мы не знаем вид поверхности отклика, то необходимо использовать в качестве аппроксимации какую-либо гибкую, плавно изменяющуюся функцию. В качестве такой функции обычно используют полином первого порядка или полином второго порядка, где коэффициенты этого полинома оцениваются с помощью эксперимента.
В этом случае наша задача состоит в том, чтобы как можно быстрее выйти в близкую к оптимуму область, а затем воспользоваться аналитическими методами локального представления этой функции в окрестности точки оптимума. Эти эксперименты могут использоваться для разрешения двух вопросов.
Первый из них связан с выбором такого направления перемещения для проведения следующего эксперимента, чтобы приблизиться к оптимальной точке. К точке оптимума (вернее в область оптимума) надо придти наискорейшим образом в RSО для этого используется метод наискорейшего подъема (или Крутое восхождение по поверхности отклика). С этой целью реализуются планы 2k или 2 k-p, используется линейная регрессия.
Второй вопрос возникает тогда, когда мы уже находимся в достаточной близости к точке экстремума. Этот второй вопрос — вопрос о виде уравнения поверхности отклика вблизи оптимальной точки. Можно воспользоваться аналитическими методами для локального представления этой функции в окрестности точки оптимума. Вблизи точки оптимума линейная аппроксимация перестает быть удовлетворительной, и используется полином более высокого порядка. Для этого необходимо использовать планы 3 k и др., -и квадратичные полиномы.
Предлагаемая концепция оптимизации условно включает 2 этапа:
1 этап оптимизации — крутое восхождение с целью скорейшего достижения области оптимума. Используется линейное планирование и реализуется пошаговая итерационная процедура движения в направлении градиента.
Однако область оптимума не может быть описана линейным приближением.
2 этап — описание области оптимума методами нелинейного планирования и исследование почти стационарной области.
Давайте подробнее рассмотрим эти 2 задачи.

