 2015-08-21
2015-08-21 1060
1060Наиболее распространенной конструктивной формой большинства рабочих машин является сочленение с электродвигателем посредством редуктора. В этом случае скорости движения вала рабочей машины и вала двигателя различны и при использовании уравнения движения электропривода все моменты должны быть приведены к единой скорости или к единому валу – валу электродвигателя. При приведении необходимо учитывать потери в редукторе. Рассмотрим кинематическую схему, приведенную на рис.2. Двигатель сочленен с рабочей машиной через редуктор с передаточным отношением i. Требуемая мощность на валу рабочей машины равна:
 .
.
Мощность на валу электродвигателя, учитывая потери в редукторе, составит:
 .
.
Заменив мощность через момент  и угловую скорость двигателя ω, получим:
и угловую скорость двигателя ω, получим: 
Решив уравнение относительно , получим:
где  - передаточное число редуктора.
- передаточное число редуктора.
При работе электродвигателя в тормозном режиме КПД передачи следует записывать в числителе, так как поток энергии имеет обратное направление, т.е.:  .
.
Приведение моментов инерции, как правило, к валу электродвигателя основано на том, что величина суммарного запаса кинетической энергии, отнесенная к валу двигателя, постоянна. Кинетическая энергия: 
После преобразования этого уравнения получим момент, приведенный к валу двигателя  :
: 
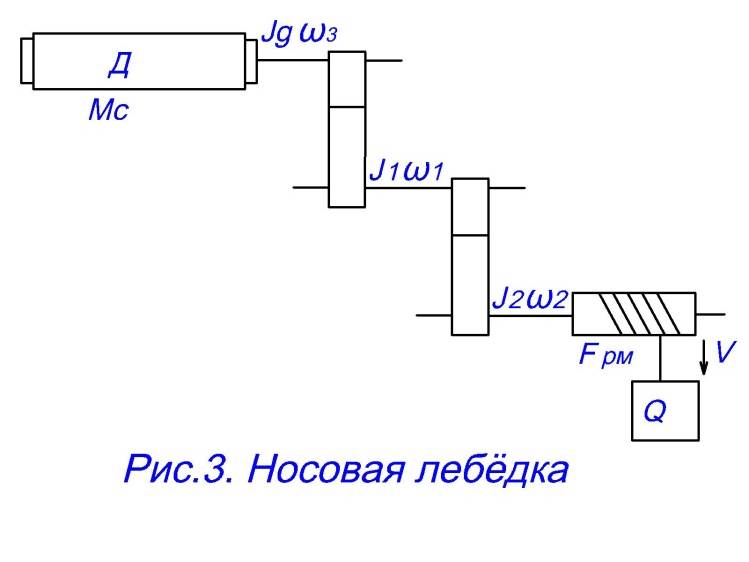
В механизмах имеющих вращательно и линейно – движущиеся части (носовые лебедки драг) для получения суммарного момента на валу электродвигателя нужно инерционные силы поступательного движения и силы сопротивления поступательному движению привести к вращательному движению, рис.3.

где  - сила сопротивления механизма поступательному движению, отсюда
- сила сопротивления механизма поступательному движению, отсюда 
Приведение поступательно движущихся масс осуществляется на основе равенства закона кинетической энергии 
Отсюда  при обратном приведении
при обратном приведении  .
.








