 2015-08-12
2015-08-12 4618
4618Физический маятник
1. Параметры колебательного движения
Движение, при котором координата точки изменяется по закону косинуса (или синуса) называется гармоническим колебанием. Таким образом, при равномерном движении точки по окружности ее проекция совершает гармонические колебания.
Смещение из положения равновесия – отклонение колеблющейся точки от положения равновесия в данный момент времени.
Амплитуда колебаний А – наибольшее отклонение колеблющейся величины от ее среднего значения.
ω t + α – фаза колебаний
α - начальная фаза колебаний
Мгновенная скорость частицы – векторная физическая величина, равная отношению перемещения Δ, совершенного частицей за очень малый промежуток времени Δt, к этому промежутку времени.
υ = d x / dt = - A∙ ω ∙ sin (ω ∙ t + α) = A∙ ω ∙ cos (ω ∙ t + α + π/2)
υmax = A ∙ ω – амплитуда скорости
Средняя скорость частицы – векторная физическая величина, равная отношению перемещения, совершенного частицей за время t, к этому времени.
Ускорение материальной частицы – векторная физическая величина, равная пределу к которому стремится отношение изменения скорости, произошедшего за малый промежуток времени к этому промежутку времени.
a = dυ / dt = - A∙ ω2 ∙ cos (ω ∙ t + α) = A∙ ω2 ∙ sin (ω ∙ t + α + π)
a max = A ∙ ω2 – амплитуда ускорения
Период колебаний Т – время, за которое совершается одно полное колебание.
Частота колебаний ν - физическая величина, показывающая число колебаний, совершаемых за 1 с.
Циклическая (или круговая) частота ω – это число колебаний, совершаемых за 2π секунд.
ω = 2 ∙ π / Т = 2 ∙ π ∙ ν
Уравнение гармонических колебаний для колебаний груза на пружине.
Гармонические колебания совершает тело массы m, на которое действует только квазиупругая сила F = - k ∙ x,
где х – отклонение колеблющегося тела от положения равновесия, k – коэффициент упругости.
Уравнение движения:
m ∙ a = - k ∙ x
∙∙
a = d2 x / d t2 = x
∙∙
m ∙ x + k ∙ x = 0
∙∙
x + k / m∙ x = 0
k / m = ω2
∙∙
x + ω2 ∙ x = 0 – дифференциальное уравнение свободных незатухающих гармонических колебаний.
x = A ∙ cos (ω ∙ t + α) – решение уравнения.
Закон изменения кинетической, потенциальной и полной энергии частицы.
Полная энергия гармонического колебания должна оставаться постоянной.
В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно.
В моменты наибольшего отклонения от положения равновесия полная энергия Е состоит только из потенциальной энергии, которая достигает своего наибольшего значения.
При прохождении системы через положение равновесия полная энергия состоит лишь из кинетической энергии, которая в эти моменты достигает своего наибольшего значения.
Кинетическая энергия Ек = m ∙ υ2 / 2 = m ∙A2 ∙ ω2 / 2 ∙ sin2 (ω ∙ t + α)
Потенциальная энергия Еп = k ∙ x 2 / 2 = k ∙A2 / 2 ∙ cos2 (ω ∙ t + α) = m ∙A2 ∙ ω2 / 2 ∙ cos2 (ω ∙ t + α)
Полная энергия Е = Ек + Еп = m ∙A2 ∙ ω2 / 2 = k ∙A2 / 2
Eк = Е ∙ sin2 (ω ∙ t + α) = Е / 2 (1 – cos 2(ω ∙ t + α))
Eп = Е ∙ cos2 (ω ∙ t + α) = Е / 2 (1 + cos 2(ω ∙ t + α))
2.Уравнение колебаний математического и физического маятника.
Под маятником в физике понимают твёрдое тело, совершающее под действием силы тяжести колебания вокруг неподвижной точки или оси. Различают математический и физический маятник.
Математическим маятником называют систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
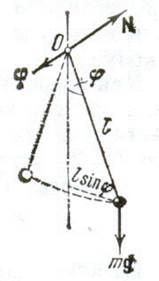
При отклонении маятника от положения равновесия возникает вращательный момент М:
М = - m ∙ g ∙ l ∙sin φ = - m ∙ g ∙ l ∙ φ (в случае малых колебаний),
где m – масса маятника, l – длина маятника, φ – угол, образованный нитью с вертикалью, - характеризует отклонение маятника от положения равновесия.
Основное уравнение вращательного движения М = I ∙ ε
∙∙
Угловое ускорение ε = d2φ / d t2 = φ
Момент инерции I = m ∙ l 2
Уравнение движения примет вид:
∙∙
m ∙ l2 ∙ φ = - m ∙ g ∙ l ∙ φ
Частота колебаний ω2 = g / l
∙∙
φ + ω2 ∙ φ = 0 – дифференциальное уравнение относительно функции φ (t).
Решение этого уравнения φ = φ0 ∙ cos (ω ∙ t + α),
где α – начальная фаза колебаний, ω – циклическая частота колебаний.
Период колебаний Т = 2 ∙ π / ω = 2 ∙ π ∙ √ l / g
Если колеблющееся тело нельзя представить как материальную точку, маятник называется физическим.
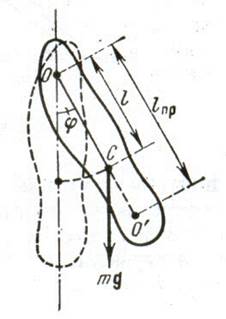
C – центр масс, l с – расстояние от точки подвеса до центра масс.
При отклонении маятника от положения равновесия возникает вращательный момент М:
М = - m ∙ g ∙ l с∙sin φ = - m ∙ g ∙ l ∙ φ (в случае малых колебаний),
Основное уравнение вращательного движения
∙∙
М = I ∙ ε = I ∙ φ
Уравнение движения примет вид:
∙∙
I ∙ φ + m ∙ g ∙ l c ∙ φ = 0
∙∙
φ + m ∙ g ∙ l c / I ∙ φ = 0
Частота колебаний ω2 = m ∙ g l c / I
∙∙
φ + ω2 ∙ φ = 0 – дифференциальное уравнение относительно функции φ (t).
Решение этого уравнения φ = φ0 ∙ cos (ω ∙ t + α),
где α – начальная фаза колебаний, ω – циклическая частота колебаний.
Период колебаний Т = 2 ∙ π / ω = 2 ∙ π ∙ √ I / m ∙ g ∙ lc
Период, частота колебаний и приведённая длина физического маятника.
Частота колебаний ω = √ m ∙ g ∙ l c / I
Период колебаний Т = 2 ∙ π √ I / m ∙ g ∙ l c = 2 ∙ π √ Lпр / g
Приведённая длина физического маятника – это длина такого математического маятника, период колебаний которого совпадает с периодом данного физического маятника.
Lпр = I / m ∙ lc
Lпр > l c

