 2015-09-06
2015-09-06 2753
2753·
1.1. ОСНОВНІ ТЕРМІНИ ТА ВИЗНАЧЕННЯ.
Відповідно до вимог ГОСТ 15895-77 виробом у машинобудуванні називають предмет виробництва, який є кінцевим продуктом для даного підприємства (цеху).
Єдина система конструкторської документації (ЄСКД) - ГОСТ 2.101-68. ’’ Види виробів ’’ встановлює для всіх галузей промисловості такі види виробів: деталі, збірні одиниці, комплекси й комплекти.
Деталь - це виріб чи його частина, виготовлена з однакового матеріалу без застосування збірних операцій. Її називають неспецифікованим виробом, якщо вона не має складових елементарних частин (вал, зубчасте колесо, болт, гайка і т.п.) та складовим, або специфікованим, якщо складається з двох і більше деталей.
Збірна одиниця - це специфікований виріб, складові частини якого з’єднані між собою за допомогою збірних операцій (редуктор, кран, стріла крана, ківш, відвал і т.п.).
Комплекс - це два і більше специфікованих вироби, не з’єднані між собою за допомогою збірних операцій на підприємстві-виробникові, але призначені для виконання взаємопов’язаних функцій (бурове устаткування технологічна лінія, що складається з декількох станків і т.п.).
Комплект - набір виробів, не зєднаних за допомогою збірних операцій на підприємстві-виробникові, що має загальне експлуатаційне призначення допоміжного характеру (комплекти запчастин інструментів і т.п.).
Це означає, що кожна будівельна машина та окремі ії частини - збірні одиниці, що суттєво ускладнює виклад матеріалу. Крім того, в інженерній практиці та сучасній технічній літературі зберігаються терміни, що не входять у ГОСТ,- ланка, вузол, агрегат,механізм, система, машина і т.п. Наприклад, багатоланковий механізм, вузлове збирання, агрегатний метод ремонту, механізм переміщення, система керування і т.п. Тому для забезпечення ясності викладу та полегшення засвоєння матеріалу в підручнику збережено таку термінологію.
Ланка - це одна чи декілька міцно поєднаних між собою деталей, що входять до складу механізму (наприклад шатун двигуна - це одна рухома ланка, хоча він і складається з кількох деталей: тіла шатуна, кришки, шатунних та корінних підшипників, шпильок і т.п.).І все ж шатун - це одна ланка, тому що в процесі руху він переміщується як єдине ціле. Всі нерухомі деталі в машині чи механізмі утворюють стояк або нерухому ланку. Так, корпус двигуна, підшипники колінчатого валу і т.п. утворюють разом єдину нерухому ланку. Таким чином у будь-якому механізмі є одна нерухома ланка і декілька рухомих ланок.
Вузол - частина машини, механізму, устаткування і т.п., що складається з кількох дещо простіших деталей (наприклад підшипник).
Агрегат - уніфікований вузол машини (наприклад двигун, насос, коробка передач, редуктор і т.п.), що виконує певні функції. Він має повну взаємозамінність.
Механізм - система ланок, призначена для перетворення руху однієї чи кількох ланок у необхідний рух інших ланок. Якщо у перетворенні руху бере участь рідке чи газоподібне середовище, то механізм називається гідравлічним або пневматичним. Зазвичай у механізмі є одна вхідна ланка (деталь), яка отримує рух від двигуна, та одна вихідна ланка, яка зєднана з робочим органом машини чи показником приладу.
Система - сукупність деталей, ланок і елементів, які забезпечують виконання певної функції машини. Наприклад, система керування машиною забезпечується завдяки злагодженості руху робочих органів у відповідності з заданою програмою і т.п.
Машина - пристрій, що виконує механічні рухи для перетворення енергії, матеріалів та інформації з метою одержання нових продуктів і заміни або полегшення фізичної і розумової праці людини. Так, за допомогою будівельної техніки і обладнання відбувається переміщення вантажів, матеріалів у просторі з необхідною швидкістю. У енергетичних машинах перетворюється енергія, а в інформаційних - інформація, що вводиться для контролю, регулювання та керування рухом. Машини можуть складатися з одного або кількох механізмів. Отож, будь-яка машина є механізм або сукупність механізмів; однак не кожен механізм - машина. Головне призначення механізму є передача і перетворення руху. Характерна ознака машини є виконання нею корисної роботи.
При технологічних процесах застосовуються, як правило, машини, які мають три складові частини: двигун, передавальний механізм та робочий орган, який безпосередньо впливає на предмет праці.
Отримують все ширше застосування машини або їх комплекси з автоматичним керуванням, які виконують процеси автоматично, тобто на основі програми без безпосередньої участі робітника, а тільки під його наглядом і контролем.
Цикл - сукупність процесів в системі явищ, які періодично повторюються, при яких обєкт, що зазнає змін, знову повертається в початкове положення. Стосовно екскаватора цикл включає в себе ряд операцій: опускання ковша до основи вибою, копання грунту і наповнення ним ковша, поворот на вивантаження, вивантаження і повернення в початкове положення.
Час циклу - сумарний час, затрачений на виконання всіх операцій циклу.
1.2. ОСІ, ВАЛИ, ПІДШИПНИКИ, МУФТИ, ГАЛЬМІВНЕ УСТАТКУВАННЯ
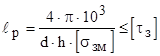
Осі. Вони служать лише для закріплення на них деталей, що обертаються. Осі не передають момент обертання. Навантаження, що діє на вісь, викликає в неї лише напруження згину. Осі (рис. 1.1,а,б) бувають рухомі (у коліс автомобільного причепа, у блоків вантажопідйомних поліспастів) та нерухомі (наприклад, у коліс залізничних вагонів).
Вали. На відміну від осей вони завжди обертаються, передають обертальний момент уздовж своєї осі й, окрім згинального навантаження, можуть відчувати дію осьового навантаження. Деякі вали (трансмісійні, гнучкі, карданні) навантажені лише обертальним моментом. За формою геометричної осі вали бувають прямими (рис. 1.1,в,г), колінчатими (рис. 1.1,д), карданними(рис. 1.1,е) та гнучкими (рис 1.1,ж). Гнучкі вали застосовуються для передачі руху між деталями, розміщеними так, що жорсткий звязок здійснити немає можливості (привод вібраторів, деяких видів механізованого інструменту та інших механізмів).
Гнучкі вали складаються з осердя 7 та щільно намотаних витків дроту 8. При цьому сусідні слої мають протилежний напрям накручування, Для охорони валу від впливу зовнішнього середовища, утримання мастила і безпечної експлуатації вал розташовують у захисній броні 9. Карданні вали застосовуються для передачі обертального моменту на вали, осі яких пересікаються під змінним кутом.
На осях і валах є ділянки, які носять певні назви (рис. 1.1,г). На головці закріплюються деталі, що крутяться. Шпоночні пази 5 потрібні для передачі обертального моменту. Буртики запобігають осьовим переміщенням. Гострі ребра притупляються конічними поверхнями - фасками. Крім того, вали можуть мати конічні ділянки, різьбу, радіусні ділянки - галтелі й канавки. Виготовляють вали й осі частіше всього з вуглецевих та легованих сталей.
Проектний розрахунок осей і валів частіше проводять на статичну міцність. Для цього методами, які відомі з курсу опору матеріалів, необхідно розглянути вісь чи вал як балку, знайти опірні реакції, побудувати епюру згинальних моментів, а для валу - і епюри крутних моментів. Знайти небезпечні перерізи і визначити в них діаметри осі і валу. Якщо в небезпечному перерізі діє лише згинальний момент, то найбільші нормальні напруги (МПа)
 (1.1)
(1.1)
де МЗ - згинальний момент, що діє в небезпечному перерізі Нžм; WЗ - момент опору перерізу при згині, мм; для суцільного круглого перерізу діаметром d WЗ=0,1d3; [sЗ] - допустиме напруження на згин, МПа.
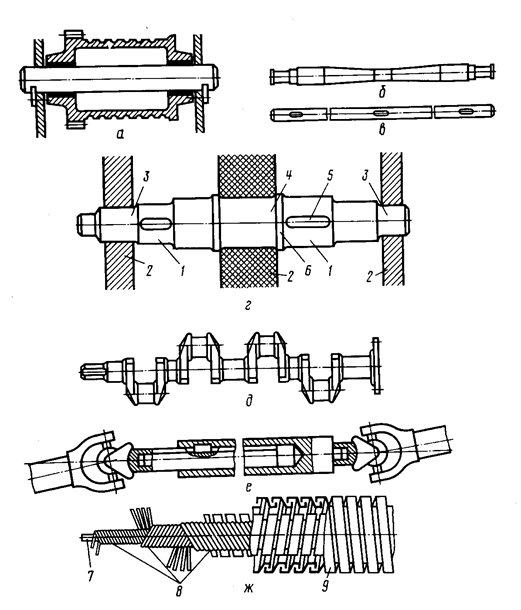
Рис. 1.1. Основні типи осей і валів.
а,б - нерухома і рухома вісі; в,г - прямі вали; д - колінчатий вал; е - карданний вал; ж - гнучкий вал; 1 - головка (підступінчата частина); 2 - опора; 3,4 - цапфи, названі відповідно шипом і шийкою; 5 - шпоночний паз(шліц); 6 - буртик; 7 стержень; 8 - дріт; 9 - захисна броня.
З урахуванням цього
 (1.2)
(1.2)
Звідки
 (1.3).
(1.3).
Якщо в небезпечному перерізі діє лише крутний момент, то найбільше дотичне напруження (МПа)
 (1.4).
(1.4).
де МК- крутний момент, Нžм; зазвичай, МК (внутрішній силовий фактор) у розрахунковому перерізі валу дорівнює обертальному моменту Т (зовнішньому навантаженню на вал); WК - момент опору валу при крученні, мм; для суцільного круглого перерізу 

З урахуванням цього
 (1.5)
(1.5)
Звідки
 (1.6)
(1.6)
Якщо в небезпечному перерізі діють одночасно згинальний і крутний моменти, слід знайти приведений момент (Нžм), який згідно четвертій теорії міцності
 (1.7)
(1.7)
а тоді визначити діаметри за формулою
 (1.8)
(1.8)
Одержані значення округлюються до найближчих більших стандартних розмірів.
Підшипники. Це - опори осей і валів, що обертаються. Вони сприймають радіальні та осьові навантаження, і передають їх на раму, корпус чи станину машини. При цьому вони також повинні утримувати вал від осьового зміщення й мати мінімальні втрати на тертя. Від якості підшипників значною мірою залежить коефіцієнт корисної дії, працездатність та довговічність машини. За видом тертя розрізняються підшипники ковзання, у яких опірна поверхня осі чи валу ковзає по робочій поверхні підшипника; підшипники кочення,у яких використовується тертя кочення завдякивстановленню шариків чи роликів поміж рухомими й нерухомими кільцями підшипника.
Підшипники ковзання мають такі переваги: допускають високу швидкість обертання; дозволяють працювати у воді, при вібраційних та ударних навантаженнях; економічні при значних діаметрах валів; дають можливість установлення на валах, де підшипник повинен бути розємним (для колінвалів); допускають регулювання різноманітних зазорів і, відповідно, точне встановлення геометричної осі вала. Недоліки: високі затрати при терті і, відповідно, занижений коефіцієнт корисної дії (0,95...0,98); необхідність у постійному змащуванні; нерівномірне зношування підшипника й цапфи; використання для виготовлення підшипників дорогих матеріалів; відносно висока трудомісткість виготовлення.
Підшипники ковзання умовно можна поділити на такі види (рис. 1.2): нерозємні (глухі) виготовляються разом зі станиною або знімними; розємні та самовстановлювані.
Нерозємні підшипники застосовуються при незначній частоті обертання і невеликому тиску. У найпростіших випадках їх роблять без втулок, у вигляді розточування у відлитій станині 3 (рис. 1.2,а).Більш досконалі підшипники виконані шляхом запресування в розточку станини 3 (рис. 1.2,б) втулки 5. Нерозємні підшипники можуть бути також знімними (рис 1.2,в), коли корпус 6 підшипника приєднується до станини за допомогою кріпильних деталей. Основні переваги нерозємних підшипників - простота конструкції та невисока вартість. Недолік міститься в тому що вони не дозволяють компенсувати зношування робочих поверхонь втулок і валів.
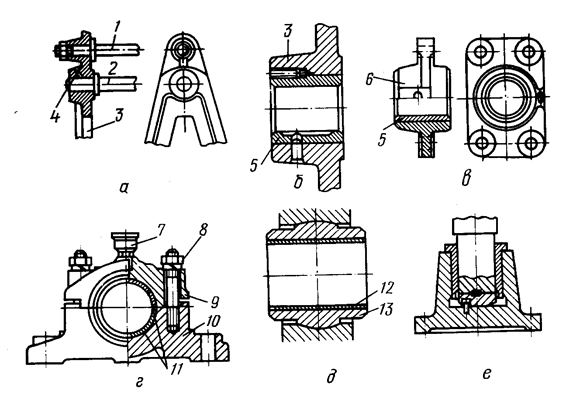
Рис. 1.2. Основні типи підшипників ковзання:
а,б,в - нерозємні; г - розємні; д - самовстановлювані; е - упорні;1- вісь; 2- вал; 3- станина; 4- отвір для змащування; 5,12- втулки; 6,13- корпуса; 7- маслянка; 8- шпилька; 9- кришка; 10-корпус; 11- вкладиш
Розємні підшипники (рис 1.2,г) складаються з корпусу 10, двох вкладишів 11, кришки 9. Вони полегшують монтаж валів і дозволяють регулювати зазор в підшипнику як при початковому збиранні, так і при ремонті. Мастильні матеріали надходять на поверхні, що труться, через отвір у кришці. Підшипники з самовстановлюваними вкладишами (рис 1.2,д) застосовуються у зєднаннях з коливальним рухом. Підшипники ковзання, які сприймають осьові навантаження, називаються упорними (підпятниками) (рис. 1.2,е). Підшипники ковзання розраховують за тиском (МПа):
 (1.9)
(1.9)
де F - радіальне зусилля на підшипник, Н;  - довжина підшипника, мм (зазвичай,
- довжина підшипника, мм (зазвичай,  /d=0,5...1,21); d - діаметр валу, тобто діаметр отвору в підшипнику, мм;
/d=0,5...1,21); d - діаметр валу, тобто діаметр отвору в підшипнику, мм;  - допустимий тиск, який найчастіше вибирають за умови невидавлювання мастила, МПа.
- допустимий тиск, який найчастіше вибирають за умови невидавлювання мастила, МПа.
Розрахунок на нагрівання проводять за формулою
 (1.10)
(1.10)
де n - колова швидкість цапфи, м/с (n=wžd/2, w - кутова швидкість валу,  )
)
Вкладиші (втулки підшипників) виготовляються металевими (бронза, антифрикційні чавуни), біметалевими (сталь чи чавун покривають бабітом). Окрім того, їх також виготовляють з пластмас, деревослоістих пластиків та інших матеріалів. Вибір матеріалу вкладиша залежить від умов роботи (характер навантаження, швидкість обертання, метод змащування).
Підшипники кочення - основний вид опор у будівельних машинах, тому що порівняно з підшипниками ковзання мають такі переваги: значно менші затрати при терті, й відносно вищий ККД (до 0,995) та менше нагрівання; у 10...20 разів менший момент тертя при пуску; економія дефіцитних кольорових металів; менші габаритні розміри в осьовому напрямку; простота обслуговування та заміни; менша затрата мастил; незначна вартість внаслідок масового виробництва стандартних підшипників; простота ремонту машин внаслідок взаємозаміни підшипників. Недоліки: обмежена можливість застосування при великих навантаженнях та високих швидкостях; непридатність для роботи при значних ударних і вібраційних навантаженнях через високу контактну напругу та погану здатність демпфірувати коливання; значні габаритні розміри в радіальному напрямі; висока вартість при серійному виробництві унікальних за розмірами підшипників.
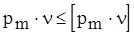
Підшипники кочення поділяються за слідуючими ознаками: за формою тіл кочення - шарикові (рис 1.3,а,б,е), роликові (рис 1.3,в,г,д); за напрямом навантаження, що сприймається - радіальні, які сприймають переважно радіальні навантаження (рис 1.3,а,б,в,д), радіально-упорні, які сприймають одночасно дію радіальних та осьових навантажень (рис. 1.3г) та упорні, які сприймають лише осьові навантаження (рис. 1.3, е); за кількістю ряду тіл кочення - однорядні (рис 1.3,а,в,г,д,е) та дворядні (рис. 1.3,б), за здатністю самовстановлення - несамовстановлювані й самовстановлювані, які допускають поворот осі внутрішнього кільця відповідно до осі зовнішнього кільця (рис. 1.3,б). Підшипник кочення, показаний на рис. 1.3,а, складається із зовнішнього 1 та внутрішнього 2 кілець із доріжками кочення 3, тіл кочення 4 та сепаратора 5, який розділяє і спрямовує тіла кочення. Підшипники кочення стандартизовані і мають умовне позначення, що складається з ряду цифр і букв. Останні дві цифри, помноженні на 5, вказують на діаметр внутрішнього кільця підшипника, Третя цифра справа вказує на серію підшипника: 1 - досить легка, 2 - легка, 3 - середня, 4 - важка і т.п. Четверта цифра означає тип підшипника: 0 - радіальний шариковий однорядний (якщо лівіше 0 немає цифри, то 0 не вказують), 1 - радіальний шариковий дворядний, 7 роликовий радіально-упорний і т.п. Пята,шоста і сьома цифри характеризують конструктивні особливості та серію підшипника. Наприклад, умовне позначення підшипника 7313 вказує, що діаметр його внутрішнього кільця дорівнює 60 мм (12´5), підшипник роликовий, конічний, середньої серії.
Рис. 1.3. Основні типи підшипників кочення:
а, б - шарикові одно- та дворядні радіальні; в - роликовий однорядний радіальний; г - роликовий радіально-упорний; д - роликовий голчатий; е - шариковий упорний; 1,2- зовнішнє та внутрішнє кільця; 3,4- доріжка та тіло кочення; 5- сепаратор; D,d - зовнішній та внутрішній діаметри; В - ширина
Вибір типу підшипника залежить від його призначення, напряму та значення навантаження, швидкості обертання, режиму роботи, вартості підшипника, особливостей монтажу. Так, при незначних навантаженнях і великих швидкостях обертання доцільно застосовувати шарикові однорядні підшипники легкої серії. При більших навантаженнях і менших швидкостях обертання використовуються підшипники середньої та важкої серії. У кожному конкретному випадку вибір типу підшипника повинен бути конструктивно й економічно обгрунтований.
Втомне викрашування - основна причина виходу з ладу підшипників кочення після тривалої їх роботи в нормальних умовах. Підшипники кочення, за винятком необертальних і тихохідних (з частотою обертання обертального кільця n  ), відповідно до ГОСТ 18855-73 розраховують на довговічність L (млн. обертів)або Lh (годин) за динамічною вантажопідйомністю С. Динамічна вантажопідйомність
), відповідно до ГОСТ 18855-73 розраховують на довговічність L (млн. обертів)або Lh (годин) за динамічною вантажопідйомністю С. Динамічна вантажопідйомність
 , (1.11)
, (1.11)
де R- приведене навантаження при постійному режимі роботи, враховує одночасну дію на підшипник комбінованих за напрямом і змінних за значенням сил, Н; розрахункова формула для визначення R залежить від типу підшипника; q=3 для шарикопідшипників; q=3.33 для роликопідшипників.
Використовуючи одержане розрахункове значення  , за довідником чи каталогом вибирають підшипник з такою динамічною вантажопідйомністю С, щоб задовольнити умову
, за довідником чи каталогом вибирають підшипник з такою динамічною вантажопідйомністю С, щоб задовольнити умову  .
.
Якщо підшипник прийнятий за конструктивними міркуваннями, то розрахунок зводиться до перевірки його довговічності (ч) за формулою
 , (1.12)
, (1.12)
де n - частота обертів,  .
.
Рекомендовані значення розрахункової довговічності підшипників для різноманітних машин і обладнання наводяться в довіднику, і для більшості будівельних машин Lh коливається в межах 4000...40000 ч.
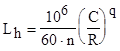
Муфти. Муфтами називається обладнання призначене для зєднання валів та передачі обертального моменту без зміни його напряму. Поруч із цим вони забезпечують виконання ряду інших функцій: компенсують неточність монтажу у відносному розміщенні осей валів; надають валам відносну рухомість під час роботи; поліпшують динамічні характеристики приводу, тобто помякшують при роботі поштовхи і удари; зберігають частини машини від перевантажень; забезпечують зєднання і розєднання валів без зупинки; регулюють момент передачі залежно від кутової швидкості і т.п. Муфти поділяють на чотири класи: нерозчіпні, які не допускають розєднання деталей у процесі роботи машини; керовані, які дозволяють зєднувати і розєднувати вали як у процесі роботи, так і під час перерви; самодіючі, які автоматично регулюють параметри; інші типи муфт.
Нерозчіпні (приводні металеві) глухі муфти за конструкцією бувають: жорсткими (рис 1.4,а,б) та пружними (рис 1.4,в).
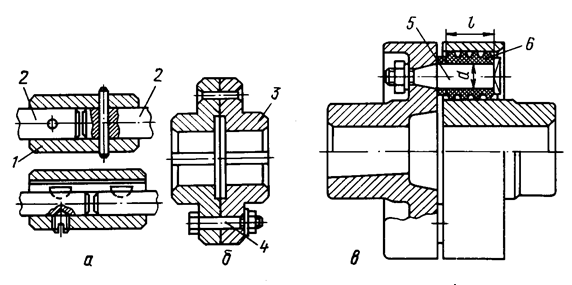
Рис. 1.4. Основні типи нерозчіпних глухих муфт:
а,б- жорсткі; в - пружна; 1,6- втулки; 2- вали; 3- полумуфта;4- болт; 5- палець; d - діаметр пальця; - довжина втулки
Глухі жорсткі муфти застосовують для зєднання суворо співосних валів. Вали, зєднані такою муфтою, працюють як єдине ціле і тому поруч із обертальним моментом, можуть сприймати згинальний момент, поперечні та осьові навантаження. Найпростішу конструкцію мають втулочні муфти (рис 1.4,а), які використовуються для зєднання валів діаметром 60...70 мм. Вони являють собою втулку 1, посаджену за допомогою шпонок, штифтів, або шліців на вихідні кінці валів 2. Цінність таких муфт - простота конструкції та малі габаритні розміри. Недоліки: потреба при монтажі і демонтажі розсувати кінці валів на всю довжину втулки або зсувати втулку вздовж валу не менше, ніж на половину її довжини, і у такій же відповідності зміщувати вали.
З глухих муфт найбільше поширення отримали фланцеві (рис 1.4,б), які складаються з двох напівмуфт 3, зєднаних болтами 4. Ці муфти можуть передавати значні обертальні моменти й застосовуються для зєднання валів діаметром ло 250 мм. Перевага цих муфт - простота конструкції й легкість монтажу; недолік - необхідність точного суміщення осей валу та дотримання перпендикулярності торцевих поверхонь напівмуфт, що доторкуються, до осей валу. Фланцеві муфти стандартизовані (ГОСТ 20761-80) і їх використовують в діапазоні обертальних моментів 8...40000 Нžм при частоті обертання до 1000 для муфт великого діаметру і до 4000 для муфт малого діаметру.
Пружні муфти дозволяють за рахунок застосовування в конструкції пружних силових елементів компенсувати радіальні та кутові зміщення, демпфувати коливання, амортизувати поштовхи й удари. Найбільше поширення в приводі будівельних машин знайшли пружні втулочно-пальцеві муфти (МУВП за ГОСТ 21424-72) (рис. 1.4,в). За конструкцією вони аналогічні фланцевим муфтам, але замість зєднувальних болтів використовуються сталеві пальці 5, на яких встановлені еластичні (гумові, шкіряні і т.п.) втулки 6. Еластичні елементи дозволяють, залежно від типорозміру, компенсувати радіальне зміщення осей валів на 0,2...0,4 мм, повздовжнє зміщення валів на 10...15 мм та кутове зміщення до 1. Такі муфти застосовуються для зєднання валів діаметром 9...160 мм при обертальних моментах 6,3...1600 Нžм. Основне навантаження на муфти - обертальний момент. У звязку з цим їх навантажувальну здатність оцінюють допустимим моментом Т, який разом із розмірами, масою та іншими даними вказується в паспортах муфт. Після вибору втулочно-пальцевої муфти за ГОСТом її працездатність визначається стійкістю втулок, тобто вираховують середній контактний тиск р на втулку і одержане значення порівнюють із допустимим  , яке для гумових втулок найчастіше дорівнює 2 МПа.
, яке для гумових втулок найчастіше дорівнює 2 МПа.
Керовані муфти поділяються на зубчасті або кулачкові (рис. 1.5,ж) та фрикційні зчіпні (рис. 1.5,а,е). У перших обертальний момент передається шляхом зчеплення, у других - силами тертя.
Фрикційні зчіпні муфти на відміну від кулачкових та зубчастих можна вмикати у процесі роботи під навантаженням. У результаті ковзання досягається плавність увімкнення й збереження машини від поломок. За конструкцією фрикційні муфти бувають: дискові (багатодискові) (рис. 1.5,а,б); конусні (рис. 1.5,в,г) та циліндричні (рис. 1.5,д,е). Найпоширеніше застосування мають дискові муфти. Фрикційні муфти працюють без мастильних матеріалів (сухі муфти) та з мастильними матеріалами (масляні муфти). Останні використовуються у відповідальних конструкціях машин при передачі великих моментів. Мастило зменшує зношування робочої поверхні, але ускладнює конструкцію муфти.
Гальма. Вони потрібні для регулювання швидкості обертання валів і осей, а також для поглинання інерції рухомих мас. За конструкцією гальмівної деталі вони бувають: колодочні, дискові і стрічкові; за способом керування - з ручним або автоматичним керуванням; за характером роботи - нормально замкнуті і нормально розімкнуті. Нормально замкнуті постійно ввімкнені і вимикаються на період роботи механізму, нормально розімкнуті - постійно вимкнені і вмикаються лише за необхідності.
У будівельних машинах та обладнанні застосовуються стрічкові гальма з ручним керуванням (рис. 1.6, а), двоколодкові з гідравлічним (рис. 1.6,б) або електричним (рис. 1.6, в) керуванням.
Стрічкові гальма з ручним керуванням складаються зі сталевої стрічки 1 з фрикційними накладками 2, які охоплюють гальмівний шків 3, та системи важелів, які регулюють натяжку стрічки. При дії на важіль силою F
Рис. 1.5. Фрикційні зчіпні (а-е) і кулачкові (ж) муфти:
1 і 2 - ведучий і ведений вали
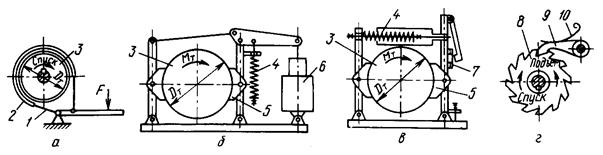
Рис 1.6. Гальмівні пристрої (а-е) і зупинник (г):
1 -стрічка; 2 - накладка; 3 - гальмівний шків; 4 - пружина; 5 - колодки; 6 - гідроштовхач; 7 - електромагніт; 8 - храпове колесо; 9 - собачка; 10 - пружина; Dт - діаметр гальмівного шківа; F - сила; Mт - гальмівний момент
гальмівна стрічка затискує шків, що обертається, здійснюючи його гальмування.
У колодкових гальмах (рис. 1.6,б,в) шківи 3 гальмуються двома гальмовими колодками 5, які притискаються до нього з двох протилежних боків за допомогою пружини 4. Розімкнути їх можна за допомогою гідроштовхача 6 або електромагнітом 7. Останні два види гальм - постійно замкнені.
Зупинні пристрої (останови). Вони служать для утримання піднятого вантажу в заданому положенні. Найширше застосування отримали зупинники (рис. 1.6,г), які складаються з храпового колеса 8, собачки 9 та пружини 10. Храпове колесо міцно закріплене на валу і може обертатися в бік «спуск» лише при виведенні із зачеплення собачки. При піднятті вантажу конфігурація зубів храпового колеса дозволяє йому вільно обертатися.
1.3. ЗЄДНАННЯ ДЕТАЛЕЙ МАШИН.
Всі будівельні машини складаються з деталей, повязаних між собою рухомими і нерухомими звязками. Нерухомі звязки називають зєднаннями. Вони дозволяють розібрати машину на вузли і деталі, спростити її виготовлення, складання, розбирання, ремонт, транспортування і т.д.
Розрізняють два види зєднання: рознімні і нерознімні. Перші (різьбові, шпоночні, шліцеві, штифтові, клинові і клемові) дозволяють розібрати збірну одиницю без пошкодження деталей. Інші (заклепувальні, зварні та клеєві) цю операцію не допускають, тому що при спробі розбирання вони частково або повністю руйнуються і стають непридатними для повторного використання.
Різьбові зєднання - найпоширеніший вид зєднання. Вони складаються з двох основних деталей: болта і гайки, зєднаних між собою за допомогою гвинтової поверхні різьби (рис. 1.7,а). За формою профілю канавки розрізняють такі види різьби: трикутну (рис. 1.7,б), трапецеїдальну (рис. 1.7,в), упорну (рис. 1.7,г), прямокутну (рис. 1.7,д) та круглу (рис. 1.7,е).
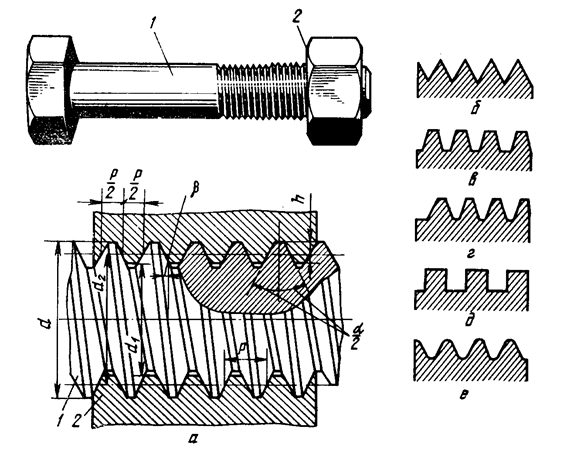
Рис. 1.7. Схема різьбового зєднання (а) і типи різьб (б-е):
1 - болт; 2 - гайка
Найбільше застосування в будівельних машинах знайшли різьбові зєднаня з трикутною (кріпильною) різьбою, тому що вони володіють значним самогальмуванням. У свою чергу трикутна різьба буває метричною (кут біля вершини дорівнює 600; всі розміри вимірюються в мм) та дюймовою (кут біля вершини дорівнює 550 або 600 і всі розміри вимірюються в дюймах). Окрім того, різьби бувають із великим і малим шагом. Перші застосовуються головним чином для закріплення деталей, які не піддаються змінному і знакозмінному навантаженню, поштовхам, струсам, вібрації. Другі використовуються там, де можливо самовідгвинчування під впливом знакозмінних навантажень, а також для тонкостінних деталей. Дюймову різьбу (трубну) нарізають на тонкостінних трубах. У машинобудуванні її застосовують лише під час ремонту або заміни деталей.
Трапецеїдальна різьба застосовується в передачі гвинт-гайка.
Упорну різьбу застосовують при передачі великих однобічних зусиль у потужних домкратах, пресах і т.д.
Прямокутну різьбу, що має порівняно високий ККД, але незначну міцність, застосовують для передачі зусиль у домкратах, невеликих пресах, стяжках і т.д.
У зєднаннях, які працюють в умовах забруднення (стяжки, гаки підйомних кранів), роблять круглу різьбу.
У окремих випадках для зєднання маслопроводів і устаткування маслянок застосовуються так звані конічні різьби, які гарантують щільність і швидкість зєднання.
До основних геометричних параметрів, які характеризують різьбу, належать (рис. 1.7,а) зовнішній d, внутрішній d1 та середній d2 діаметри різьби; кут підняття різьби b; кут профілю a; робоча висота профілю ; шаг різьби . Геометричні параметри більшості різьб та допуски на їх розміри стандартизовані. Основні позитивні якості різьбових зєднань: висока навантажувальна здатність і надійність; зручність збирання і розбирання; наявність значної номенклатури різьбових деталей, пристосованих до різноманітних умов експлуатації; відносно невисока вартість, тому що при їх виготовленні застосовуються високопродуктивні технологічні процеси.
Основний недолік різьбових зєднань - наявність значної кількості концентратів напруги на поверхні різьбових деталей, що знижує їх виносливість під час дії змінних навантажень.
За своєю конструкцією різьбові кріпильні деталі поділяються на болти, гвинти, гайки та стопорні пристрої.
Болтом називається стержень, який має на одному кінці головку, а на іншому - гвинтову різьбу, на яку накручується гайка (рис. 1.8,а). За формою головки розрізняються болти з шестигранними (рис. 1.8,б,в,г,д), напівкруглими (рис. 1.8,е,ж) та потайними (рис. 1.8,з) головками.
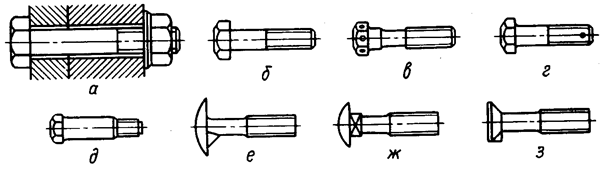
Рис. 1.8. Схема болтового зєднання (а) і типи болтів (б-з)
Гвинтом називається такий же болт, але закріплюючий деталі без гайки, за рахунок вкручування його в одну з деталей (рис. 1.9,а). Гвинти загального призначення розрізнюють: кріпильні, які служать для скріплювання зєднувальних деталей (рис. 1.9,б,в,г,д,е,ж) та установочні, призначені для попередження взаємного зсуву деталей (рис. 1.8,з,и,й,к). Установочні гвинти на відміну від кріпильних мають різьбу по всій довжині стержня.
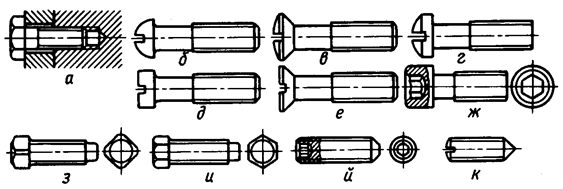
Рис. 1.9. Схема гвинтового зєднання (а) і типи гвинтів(б-к)
Шпилькою називається циліндричний стержень, що має різьбу з обох сторін (рис. 1.10,а). Одним кінцем шпилька (як і гвинт) вкручується в одну із зєднувальних деталей, а на другий ії кінець накручується гайка.
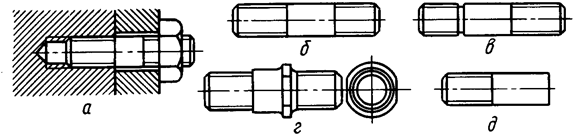
Рис. 1.10. Схема шпилькового зєднання (а) і типи шпильок(б,в,г,д)
Гайкою називається деталь, яка має отвір із різьбою і призначена для закріплення зєднувальних деталей. Більш поширені шестигранні гайки (рис. 1.11,а,б,в,г) та баранчикові (рис. 1.11,е,ж) для закручування вручну.
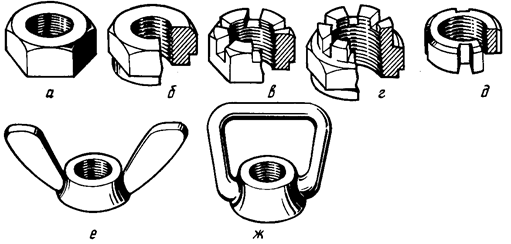
Рис 1.11. Типи гайок
Стопорні пристрої попереджають самовідкручування різьбових деталей під дією змінного навантаження, вібраціях, струсах. Найпоширені стопорні пристрої - пружинні шайби (рис. 1.12,а,б), шплінти (рис. 1.12,в), стопорні шайби (рис. 1.12,г,д), конрогайки (рис. 1.12,е).
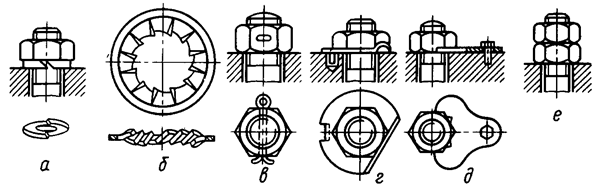
Рис. 1.12.Стопорні пристрої
Методика розрахунку болтових зєднань залежить від їх конструкції, технології збирання, характеру й напряму діючих навантажень. Стандартні болти, гвинти, шпильки мають однакову міцність стержня на розтягування і різьби на зріз і зминання. У звязку з цим при розрахунку враховується лише внутрішній діаметр різьби d1 Наприклад, якщо болт працює тільки на розтягання (рис. 1.13,а), то внутрішній діаметр різьби болта визначається з умови міцності на розрив:
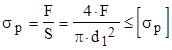 , (1.3)
, (1.3)
де F - сила, що діє вздовж осі болта, Н; S - площа перерізу болта по внутрішньому діаметру різьби, мм2; d1 - внутрішній діаметр різьби, мм;
 - допустиме напруження на розрив, МПа.
- допустиме напруження на розрив, МПа.
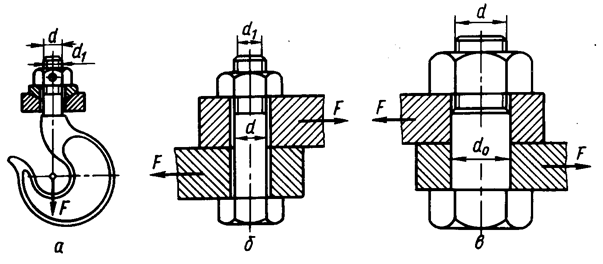
Рис. 1.13. Схеми навантаження болтових зєднань
Визначивши внутрішній діаметр різьби
 , (1.14)
, (1.14)
за ГОСТом добирають болт із таким або ж більшим d1.
Якщо ж на зєднання, у якому болт поставлений із зазором (рис. 1.13,б) діє сила, перпендикулярна осі болта, то він працює на розтягнення і зкручування. У такому разі сила F1, із якою треба затягнути болт, повинна бути такою, щоб на поверхні контакту зєднуваних деталей сила тертя дорівнювала або ж була більшою, ніж поперечне навантаження F, тобто
 (1.15)
(1.15)
де f - коефіціент тертя, i - кількість площин, на яких діє сила тертя.
Якщо прийняти коефіцієнт тертя f=0,16...0,20 (для сталі по сталі), то одержимо
 , або
, або  (1.16)
(1.16)
Тоді рівняння міцності матиме такий вигляд
 (1,17)
(1,17)
Звідси з урахуванням коефіцієнтів зкручування (1,3) й ковзання (1,2)
 (1.18)
(1.18)
Якщо ж у зєднанні (рис. 1.13,в) болт встановлений у отвір без зазору і діє сила, перпендикулярна осі болта, то він працює на зріз і зминання. Рівняння міцності при зрізі з урахуванням коефіцієнта зкручування (1,3) та ковзання (1,2) матиме такий вигляд
 (1.19)
(1.19)
звідки
 (1.20)
(1.20)
Перевірка на зминання ведеться за найменшою робочою товщиною деталей, що зєднуються:
 (1.21)
(1.21)
де d - товщина найтоншої деталі, що зєднується, мм;  - допустиме напруження при зминанні, МПа.
- допустиме напруження при зминанні, МПа.
Шпоночні зєднання застосовуються для передачі обертального моменту між валом і посадженими на нього деталями (зубчасті колеса, шківи, муфти, зірочки і т.д.). Деталі зєднують за допомогою шпонок. Шпонки встановлюють у спеціальний паз, зроблений на валу і в ступиці деталі. За формою шпонки бувають: призматичні (рис. 1.14,а), клинові (рис. 1.14,б) та сегментні (рис. 1.14,в). Перші не дозволяють деталі обертатись відносно валу, але не можуть утримувати її від повздовжнього переміщення. Другі закріпляють деталі так, що вони не можуть ні переміщуватися вздовж валу, ні обертатися навколо валу. Однак цей вид зєднання зміщує ступицю відносно валу і викликає перекіс і радіальне биття деталі. Призматичні й сегментні шпонки створюють ненапружене зєднаня і забезпечують точне встановленні деталі на валу. Передача обертального моменту забезпечується через бокові поверхні шпонки. У звязку з цим шпоночні зєднаня розраховані на зминання на бокових поверхнях пазів і на зріз по поперечному перерізу шпонки. Переріз шпонки (b´h) підбирають по таблицям стандартів залежно від діаметру валу. Для передачі більших обертальних моментів іноді встановлюють декілька шпонок. Найнебезпечніше - зминання шпонок або ступиць, тому з рівняння міцності на зминання визначають робочу довжину шпонки, а тоді перевіряють на зріз:
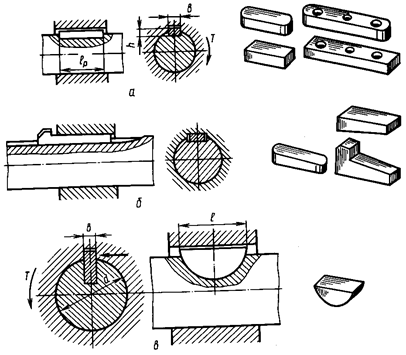
Рис. 1.14. Схеми зєднань з призматичними (а), клиновими (б) та сегментними (в) шпонками
 ,
,  , (1.22)
, (1.22)
де F - колове зусилля, Н; h, p - висота і робоча довжина шпонки, мм; - допустиме напруження при зминанні, МПа (береться для більш мякого матеріалу); T - обертальний момент Нžм; d - діаметр валу, мм.
Тоді
 (1.23)
(1.23)
Рівняння міцності на зріз має такий вигляд:
 , (1.24)
, (1.24)
де  - допустиме напруження на зріз, МПа.
- допустиме напруження на зріз, МПа.
Звідси випливає,
 (1.25)
(1.25)
Переваги шпоночних зєднань такі: простота і надійність конструкції, порівняно низька ціна, зручність збирання. Недолік - послаблення валу й ступиці шпоночними пазами, які зменшують поперечний розріз і викликають значну концентрацію напружень.
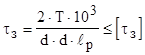
Шліцеві зєднання - це багатошпоночні зєднання, у яких шпонки виготовлено разом із валом. За профілем шліців бувають: прямокутні (рис. 1.15,а), евольвентні (рис. 1.15,б) та трикутні (рис. 1.15,в). Зєднання виконують рухомим або нерухомим в осьовому напрямі.
 |
Рис. 1.15 Схеми зєднань з прямокутними (а), евольвентними (б) та трикутними (в) шліцами:
1- втулка; 2- вал
Кількість шліців та їх розміри приймають залежно від діаметру вала за ГОСтом. Розрахунок шліцевих зєднань зводиться до перевірки на зминання бокових поверхонь шліців:
 ,
,
де F - колове зусилля, Н;
 ,
,
Т - обертальний момент, Нžм; D,d - зовнішній та внутрішній діаметри шліців, мм; S - площа робочих поверхонь шліців, мм2;
 ,
,
- робоча довжина зєднання, мм; z - кількість шліців, К- коефіцієнт, який враховує нерівномірність розподілу навантаження між шліцами.
Звідси випливає,
 (1.26)
(1.26)
Порівняно зі шпоночними шліцові зєднання мають такі переваги: більшу навантажувальну здатність внаслідок більшої робочої поверхні контакту; більш точне центрування сполучних деталей; менше послаблення валу і менші напруження зминання; кращу технологічність.
Штифтові зєднання (рис. 1.16) застосовуються при точному встановленні зєднуваних деталей (фіксація положення кришки редуктора відносно корпуса, рис. 1.16,а), в ролі запобіжних деталей (штифти, що зрізаються) та для зєднання деталей, які передають незначні навантаження (рис. 1.16,б). Потрібний діаметр штифта визначається з розрахунку на зріз.
Клинові зєднання здійснюються за допомогою клина, забитого або затягнутого гвинтовим пристроєм у отворі деталей, що скріплюються.
Щодо призначення клинові зєднання розподіляються на: силові (рис. 1.17,а), у яких клини служать для міцного зєднання деталей машин, та установочні (рис.1.17, б),у яких клини призначені для регулювання й встановлення деталей машин у потрібному положенні.
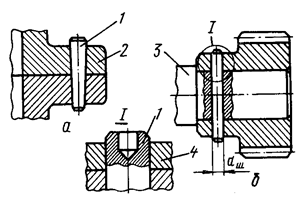 |
Рис. 1.16. Штифтові установочні (а) та силові (б) зєднання:
1- штифт; 2- кришка; 3- вал; 4- зубчасте колесо; dш - діаметр штифта
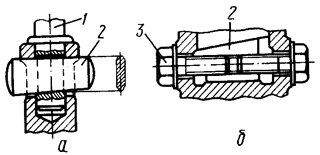 |
Рис. 1.17. Клинові силові (а) та установочні (б) зєднання:
1-деталь; 2- клин; 3- гвинтовий пристрій
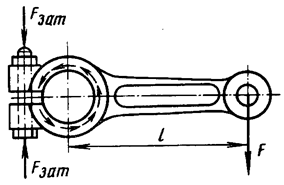 |
Рис. 1.18. Клемове зєднання
F- зусилля; Fзат- зусилля затяжки;
l- плече прикладеної сили
Клемові зєднання здійснюються за допомогою клем у вигляді розємного (рис. 1.18) та нерозємного з прорізом циліндра, стягнутого болтами відносно стержня круглого перерізу. Їх застосовують на валах і осях кривошипів, важелів противаги шатунів і т.д. Клемові зєднання прості за конструкцією, допускають регулювання їх взаєморозташування, але здатні передавати лише невеликі навантаження.
Нерозємні зєднання у цьому підручнику не розглядаються, тому що їх різновиди, галузь застосування та розрахунок детально викладені в дисципліні «металеві конструкції», яка вивчатиметься студентами на наступних курсах.
1.4. МЕХАНІЧНІ ПЕРЕДАЧІ
Більшість сучасних будівельних машин створюють за схемою «двигун-передача - робочий орган (виконавчий механізм)». Передача між двигуном і робочим органом машини необхідна, коли різняться їх швидкості руху, неможливо або ж важко безпосередньо змінювати швидкість робочого органа за допомогою двигуна, у процесі роботи машини необхідні обертальні моменти, які перевищують обертальний момент на валу двигуна, одним двигуном треба приводити в рух декілька механізмів з різноманітними швидкостями, різні характери руху органів машини та двигуна(наприклад, двигун має обертальний рух, а робочий орган повинен рухатися прямолінійно зі змінною швидкістю або зупинками), неможливо безпосередньо зєднати вали двигуна та робочих органів з точки зору техніки безпеки, зручності обслуговування, збору та монтажу.
Таким чином, передача - це пристрій, що служить для передавання механічної енергії на відстань, як правило, з перетворенням швидкостей і моментів, а іноді й із перетворенням видів закону руху. У автомашинах, тракторах та інших самохідних машинах такі пристрої чи їх сукупність називаються трансмісією.
У практиці машинобудування застосовуються такі різновиди передач: механічні, гідравлічні, пневматичні, електричні та комбіновані. Найширше використовується в будівельних машинах механічні передачі. За принципом дії їх можна поділити на три групи: передачі тертям (фрикційні, пасові); передачі зачепленням (зубчасті, червячні, ланцюгові) та канатні передачі. Ланки, що передають енергію, називаються ведучими, а ті, що сприймають її - веденими (рис. 1.19). Основні параметри передач: коефіцієнт корисної дії (ККД) h, передавальне відношення (число) u, потужність на валах Р і крутний момент М.
В звязку з тим, що при передачі потужності від ведучої ланки до веденої відбувається її затрати на тертя в рухомих частинах, то Р1>Р2. Ці затрати характеризуються ККД, який визначається за допомогою виразу
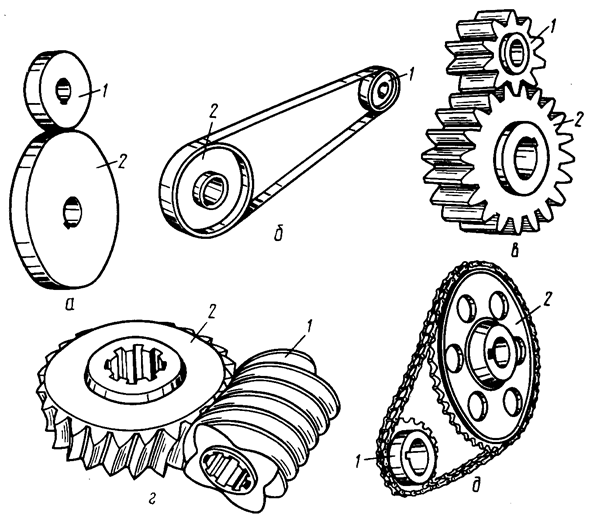
Рис. 1.19.Механічні передачі:
а- фрикційна; б- пасова; в- зубчаста; г- червячна; д- ланцюгова; 1,2- ведуча та ведена ланки
 . (1.27)
. (1.27)
Для багатоступеневої передачі яка складається з кількох окремих, послідовно зєднаних передач, загальний ККД визначається як додаток ККД окремих передач:
 (1.28)
(1.28)
Відношення кутової швидкості w1, або частоти обертання n ведучої ланки до кутової швидкості w2 або частоти обертання n2 веденої ланки називається передавальним відношенням:
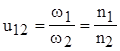 (1.29)
(1.29)
Якщо передача багатоступенева, то її загальне передавальне відношення дорівнює додатку передавальних відношень окремих ступенів, тобто
 . (1.30)
. (1.30)
У техніці часто використовується термін «передавальне число». Під ним слід розуміти відношення кількості зубців великого колеса z2 до числа зубців меншого колеса z1. Його позначають тією ж буквою u, але без індексу:
 (1.31)
(1.31)
Передавальне число на відміну від передавального відношення завжди позитивне і не може бути меншим одиниці. Воно характеризує передачу лише кількістю. Передавальне число та передавальне відношення можуть співпадати лише в передачі внутрішнього зачіплювання, тому що ведуче і ведене колеса обертаються в один бік. У передач зовнішнього зачіплювання вони не співпадають, тому що мають різні знаки: передавальне відношення - негативне, а передавальне число - позитивне.
Колова швидкість (м/с) ведучої чи веденої ланки
 , (1.32)
, (1.32)
де d- діаметр котка, шківа та ін., м.
Потужність (Вт) на валу
 , (1.33)
, (1.33)
де F- колова сила, Н; n- колова швидкість, м/с;
Обертальний момент (Нžм) на валу
 , (1.34)
, (1.34)
Обертальні моменти на ведучому Т1 і веденому Т2 валах повязані залежністю Т2=Т1 hžu. Звідси випливає, що в уповільнених передачах на кожному подальшому валу обертальний момент зростає, а потужність через втрати на тертя зменшується.
Обертальний момент ведучого валу Т1- момент рухомих сил, його напрям співпадає з напрямом обертання валу. Момент веденого валу Т2- момент сил опору, тому його напрям протилежний напряму обертання валу.
Колова сила F(H) повязана з обертальним моментом Т (Нžм) залежністю
 , (1.35)
, (1.35)
де d- діаметр котка, шківа, колеса та ін., мм.
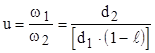
Фрикційні передачі - це передачі тертям. У них обертальний момент від одного вала до іншого передається за допомогою двох притиснутих один до одного котків. Застосовуються в основному для передач потужністю до 20 кВт. За конструкцією вони бувають: з гладкими циліндричними котками та паралельними осями (рис. 1.20,а); з клинцюватими котками та паралельними осями (рис. 1.20,б); з конічними котками та перехрещуючими осями (рис. 1.20,в).
Сила тертя між котками (рис. 1.20,а)
F1=Fžf,
де f- коефіцієнт тертя, F- сила притискання котка, Н.
Передавальне відношення фрикційної передачі з урахуванням ковзання
 ,
,
де w1 і d1- кутова швидкість  та діаметр ведучого котка (мм);
та діаметр ведучого котка (мм);
w2 і d2- кутова швидкість та діаметр веденого котка (мм); е - коефіцієнт, що враховує ковзання, приймається у межах 0,01...0,03.
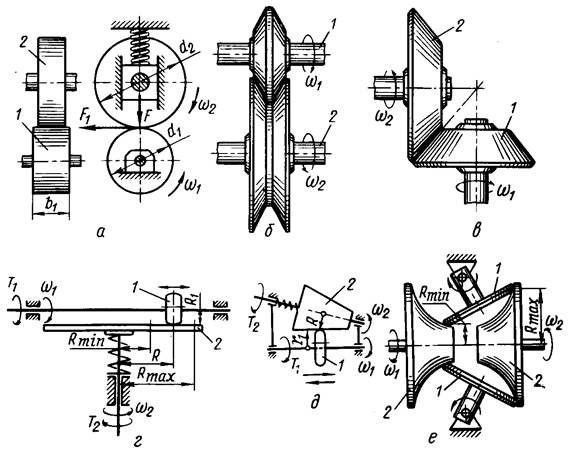
Рис. 1.20. Фрикційні передачі:
1,2- ведучий та ведений котки
Фрикційні передачі зі змінним передавальним числом називаються варіаторами. Вони служать для плавної, безступеневої зміни передавального числа. У таких передачах (рис. 1.20,г,д,е) змінюючи положення ведучого котка 1, можна плавно регулювати кутову швидкість веденого котка 2.
Переваги фрикційних передач: простота виготовлення котків порівняно з зубчастими колесами, можливість плавного регулювання кутових швидкостей у заданих межах, безшумність роботи, простота попередження поломок.
Основні недоліки: необхідність пристрою для притискування котків, великі навантаження на вали і підшипники, непостійність передавального відношення, порівняно невисокий (0,80...0,92) ККД. Фрикційні передачі застосовуються у зубчастих фрикційних лебідках, бульдозерах, скреперах, екскаваторах із канатно-блоковою системою керування.
Пасові передачі відносяться до передач із гнучким звязком і застосовуються при необхідності передачі руху на значну відстань (до 12...15 м). Їх використовують при потужності до кілька сот кіловат. У них обертальний момент (рис. 1.21,а) від ведучого валу передається за допомогою гнучкої стрічки 3(паса), який охоплює шківи 1 і 2, що знаходяться на цих валах. В залежності від форми поперечного перерізу паса розрізняються: плоско- (рис. 1.21,б), клино- (рис. 1.21,в) та кругло-пасові (рис. 1.21,г) передачі. Найширше застосування в будівельних машинах отримали клинопасові передачі, які мають 3 різновиди пасів: зі звичайним трапецієвидним перерізом (рис. 1.21,в), з гофрованою внутрішньою поверхнею, зубчасті (рис. 1.21,д).
Рис. 1.21.Пасові передачі:
1,2- ведучий та ведений шківи; 3- пас; А- міжосьова відстань; F1,F2- зусилля в ведомій та ведених гілках;  - кут охоплення
- кут охоплення
Плоскі і клинові паси нормовано ГОСТами. За застосовуваним матеріалом клинові паси бувають кордтканинними та кордшнуровими, а плоскі - прогумованими, тканинними, поліамідними, шкіряними, бавовняними. В клинопасових передачах зазвичай використовують від одного до 8 пасів. Передавальне відношення пасових передач
 , (1.37)
, (1.37)
а без врахування ковзання
 ,
,
де d1 і d2- діаметри шківів, мм; е - коефіцієнт, що враховує ковзання, е =0,01...0,02.
Для плоскопасових передач u  5, а для клинопасових u 10. Розрахунок клинопасової передачі зводиться до вибору типу пасу залежно від потужності, що передається Р (кВт) і визначенню необхідної кількості пасів.
5, а для клинопасових u 10. Розрахунок клинопасової передачі зводиться до вибору типу пасу залежно від потужності, що передається Р (кВт) і визначенню необхідної кількості пасів.
Переваги пасових передач: простота конструкції; порівняно невисока ціна; можливість передавати оберти на значні відстані й працювати з високими швидкостями; плавність роботи й невеликий шум; незначна чутливість до поштовхів, ударів, вібрацій, перевантажень.
Головні недоліки: невисока довговічність паса; непостійність передавального відношення; великі радіальні габарити при передачі значних потужностей, підвищені навантаження на вали й опори внаслідок попередньої натяжки пасів; чутливість до потрапляння на них мінеральних мастил; неможливість застосування у вибухонебезпечних приміщеннях внаслідок електризації пасів.
У звязку з цим у будівельних машинах та обладнанні пасові передачі використовуються переважно як такі, що зменшують частоту обертів при потужності 50 кВт та коловою швидкістю до 50 м/с.
Найчастіше пасову передачу використовують як швидкохідну ступінь приводу, встановлюючи ведучий шків на вал двигуна.
При оптимальному навантаженні ККД дорівнює 0,97..0,98 для плоскопасової та 0,92...0,97 для клинопасової передач.
Ланцюгові передачі служать для передачі руху між паралельними валами, розміщеними на значній відстані один від одного (до 8 м.). Їх використовують для потужності до 100 кВт. Обертальний момент у них від ведучого валу (рис. 1.22,а) до веденого передається за допомогою безкінечного ланцюга 2, який проходить повз ведучу 1 і ведену 3 зірочки, які розміщені на цих валах. Окрім цих основних елементів більшість конструкцій ланцюгових передач мають натяжні та мастильні пристрої.
За конструкцією ланцюги бувають трьох видів: роликові, втулочні та зубчасті.
Роликові ланцюги типу ПРЛ (рис. 1.22,б) складаються з послідовно повторюючих внутрішніх 8 і зовнішніх 6 ланок, шарнірно поєднаних між собою. Кожен із шарнірів складається з валика 4, впресованого в зовнішні пластини, та втулки 7, закріпленої в отворах внутрішніх пластин. Для зменшення зношування шарнірів, а також зубців зірочки на втулки 7 надіваються ролики 5. При передачі великих потужностей застосовуються дворядні (рис. 1.22.в) та 4- рядні роликові ланцюги, що дозволяє значно зменшити габаритні розміри передачі в площині, перпендикулярній осям. Однак такі ланцюги дорого коштують.
Втулочні ланцюги відрізняють від уже розглянутих відсутністю ролика. Тому зношуваностійкість передачі з таким ланцюгом менша, ніж роликової.
Зубчасті ланцюги (рис. 1.22,г) складаються з набору зубчастих пластин 9, шарнірно зєднаних між собою за допомогою валиків 11. Для запобігання сходження ланцюга із зірочок передбачено внутрішні направляючі пластини 10. Кількість пластин 9 залежить від передавальної потужності. Зубчасті ланцюги забезпечують високу кінематичну точність та більш плавну роботу, тому що контакт зовнішніх зубчастих виступів кожної пластини відбувається з боковими поверхнями одразу двох трапецієвидних зубів зірочки. Основний параметр ланцюгової передачі - шаг р; його значення стандартизоване і при розрахунку приймається відповідно до ГОСТу.
Предавальне відношення ланцюгових передач
 , (1.39)
, (1.39)
де z2 і z1- кількість зубців веденої і ведучої зірочок. Передавальне відношення ланцюгової передачі частіше всього не перевищує 5.
Переваги ланцюгових передач: порівняно з пасовими мають значно менші габарити й навантаження на вали; значно високий ККД (0,96...0,98); постійність передавального відношення; можливість передачі руху одним ланцюгом декільком зірочкам.
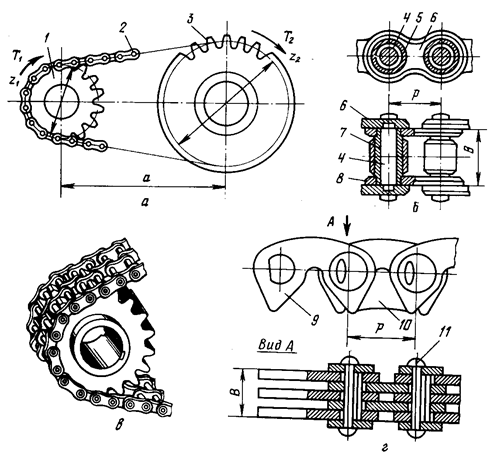
Рис. 1.22. Ланцюгові передачі:
1,3- ведуча та ведена зірочки; 2- ланцюг; 4- валик; 5- ролик; 6,8- внутрішні і зовнішні ланки; 7- втулка; 9- пластина; 10- направляюча пластина; 11- валик; Т1, Т2- обертальні моменти; d1, d2- середні діаметри; а- міжосьова відстань; В- ширина ланцюга
Головні недоліки: порівняно висока вартість ланцюгів; «витягування» ланцюгів (збільшення шагу ланцюга внаслідок зношення шарнірів) і, як наслідок, застосування натяжних пристроїв; підвищенний шум при роботі; необхідність високоякісного монтажу передачі та складність догляду за нею (змащування, регулювання); нерівномірність ходу.
Зубчасті передачі застосовуються для передачі руху з відповідною зміною його кутової швидкості та обертального моменту за значенням і напрямом. У сучасному машинобудівництві вони є найпоширенішим типам механічних передач. Їх використовують для передачі руху та обертального моменту в широкому діапазоні потужностей (до 300 МВт), колових швидкостей (до 300 м/с) та передавальних відношень (від десяти до декількох тисяч).
У зубчастих передачах рух передається за допомогою зчіплювання пари зубчастих коліс (рис. 1.23). Менше з зубчастих коліс (ведуче) називається шестернею, а більше (ведене)- зубчастим колесом. Термін «зубчасте колесо» належить як до шестерні, так і до колеса.
Головні переваги: постійність передавального відношення; компактність; довговічність, надійність у роботі; висока навантажувальна здатність; високий ККД (до 0,97...0,99 для однієї пари коліс); простота обслуговування; порівняно невеликі навантаження на вали і вісі.
Основні недоліки: неможливість безступеневої зміни передавального відношення; високі вимоги до точності виготовлення і монтажу; можливість появи шуму, особливо при великих швидкостях; невеликі амортизаційні властивості; громіздкість при значних відстанях між осями коліс; не вберігають машину від можливих небезпечних перевантажень.
Зубчасті колеса та передачі класифікуються за такими ознаками:
1. За взаємним розміщенням геометричних осей валів - осі валів паралельні (циліндрічні, рис. 1.23, а-д); осі валів перетинаються (конічні, рис. 1.23, ж-и); осі валів перехрещуються (гіперболоїдні, гвинтові, рис. 1.23,е; гіпоїдні, рис. 1.23, к; червячні, рис. 1.23, л).
Гвинтовою зубчастою передачею називається така гіперболоїдна зубчаста передача, у зубчастих коліс якої початкові поверхні - круглі циліндри. Якщо ж за початкову поверхню зубчастих коліс прийнято конуси з неспівпадаючими вершинами (рис. 1.23, к), то передача - гіпоїдна. Червячна передача - випадок гіперболоїдної зубчастої передачі, у якої кут схрещення осей валів у більшості випадків дорівнює 90°
Найбільше поширення в будівельних машинах знайшли циліндричні, конічні і червячні передачі.
2. За розміщенням зубів відносно твірної коліс - прямозубі (рис. 1.23, а,г,д,ж), косозубі (рис. 1.23, б,з), шевронні (рис. 1.23, в) та із криволінійним зубом (рис. 1.23, е,и,к).
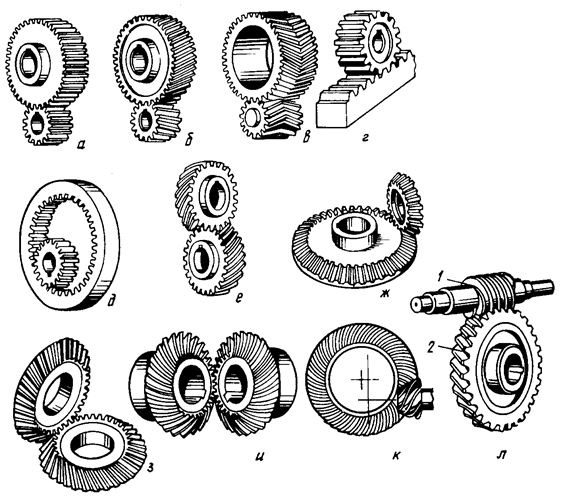
Рис. 1.23. Зубчасті передачі
1- червяк; 2- червячне колесо
Прямозубі передачі застосовують переважно при невисоких і середніх колових швидкостях, при великій твердості зубів, коли динамічні навантаження від неточності виготовлення коліс незначні порівняно з корисними. Прямозубі колеса використовуються в планетарних та відкритих передачах, а також за необхідності осьового зміщення коліс для перемикання швидкостей у коробках передач.
При збільшенні кількості зубів коліс до безкінечності, останні перетворюються в рейку, а евольвентний профіль зуба - в прямолінійний, зручний для виготовлення та вимірювання (рис. 1.23, г). Передача, що складається з шестерні та зубчастої рейки служить для перетворення обертального руху шестерні в поступальний рух рейки і навпаки.
Косозубі передачі забезпечують більш плавну роботу, що дозволяє зменшити діаметр шестерні порівняно з прямозубим зачепленням. При косозубих колесах в зачепленні одночасно перебуває більша кількість зубів, ніж у прямозубих, що дозволяє передавати більші потужності при однакових габаритах передачі. Косозубі передачі застосовуються для відповідальних передач при середніх і високих швидкостях. Обєм їх використання у сучасних машинах безперервно зростає і складає понад 30 відсотків усіх циліндричних коліс. Недолік косозубого зачеплення - виникнення в передачі під час роботи осьового зусилля, що ускладнює конструкцію опор, оскільки під дією цієї сили колесо може зміститися вздовж своєї осі. Цього недоліку немає у шевронній передачі, яка схожа на здвоєну косозубу передачу з протилежним напрямом зубів. Осьові сили тут урівноважуються на самому зубчастому колесі. Шевронні колеса застосовуються в потужних редукторах. У гвинтових передачах точковий контакт та ковзання призводять до швидкого зношування зубів навіть при незначних навантаженнях. Тому гвинтові передачі використовуються в малонавантажених передачах, наприклад у приладах.
3. За відносним розміщенням поверхонь вершин і впадин зубів коліс - із зовнішнім (рис. 1.23, окрім д) та внутрішнім (рис. 1.23, д) зачепленням.
4. За конструктивним виконанням - відкриті і закриті (редуктори і коробка передач) передачі. У перших зуби коліс працюють в суху або ж періодично змащуються. Другі розташовують у спеціальному корпусі з постійним змащуванням місць зачеплення зубів.
5. За формулою бокового профілю зубів - евольвентні (профілі окреслені евольвентними колами), циклоїдні (профілі зубів окреслені за елі- та гіпоциклоїдами) та кругові (профілі зубів окреслені коловими дугами).
Головна кінематична умова, якій повинні відповідати профілі зубів, - постійність миттєвого передавального відношення передачі. Цій умові відповідають більшість класів кривих. Для забезпечення високого ККД, міцності і довговічності коліс профілі повинні мати малі швидкості ковзання та достатні радіуси кривизни в точках контакту. Профілі зубів повинні допускати легке виготовлення, зокрема нарізанням простим інструментом незалежно від кількості зубів коліс.
Ці вимоги задовольняє запропонований Ейлером у 1760 р. евольвентний профіль зуба, який найбільш широко застосовується в машинобудуванні. Він має ряд суттєвих технологічних і експлуатаційних переваг:
кожне евольвентне зубчасте колесо входить у зачеплення з колесами, які мають будь-яку кількість зубів при однаковому модулі;
евольвентне зачеплення малочутливе до незначних відхилень міжосьової відстані;
евольвентні зубчасті колеса нарізають простим інструментом, вони зручні для контролю;
евольвентне зачеплення дозволяє корегувати (поліпшувати) профіль зубів, тобто використання таких ділянок евольвенти, які забезпечують найкращу роботу передачі.
Круговий профіль зуба запропонований М.Л. Новиковим у 1954 р. Порівняно з евольвентним він дозволяє підвищити навантаження на передачу. Це зацеплення можливе лише при косих зубах.
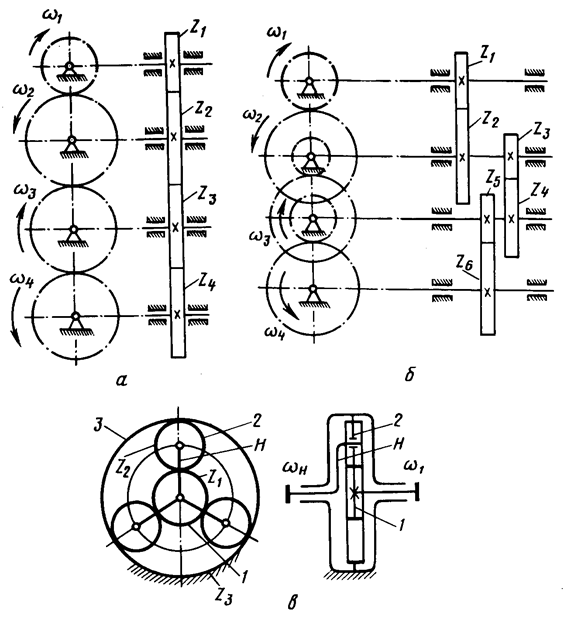
Рис. 1.24.Складні зубчасті передачі:
1- центральне колесо; 2- сателіт; 3- нерухоме колесо; w- кутова швидкість; z- кількість зубів
6. За кількістю ступеней - одноступеневі (прості зубчасті передачі, рис.1.23) та багатоступеневі (складні зубчасті передачі, рис. 1.24). Складною зубчастою передачею називається така передача, до складу якої входить більше, ніж два зубчастих кол








