 2015-09-06
2015-09-06 959
959Динамическое исследование машинного агрегата
1.Задачи динамического исследования
Задачей динамического исследования машины является определение закона движения входного звена исполнительного механизма  с учетом динамических свойств приводного двигателя, движущего момента
с учетом динамических свойств приводного двигателя, движущего момента  и динамической нагрузки в приводе
и динамической нагрузки в приводе  , а также оценка неравномерности вращения входного звена и проверка перекладки зазоров в приводе, улучшение динамических показателей качества машины.
, а также оценка неравномерности вращения входного звена и проверка перекладки зазоров в приводе, улучшение динамических показателей качества машины.
2.Построение динамической и математической модели машины и выбор передаточного механизма
Схема машинного агрегата.

Рис. 1.1 Схема машинного агрегата
Машина включает в себя двигатель, передаточный и исполнительный механизм.
Динамический расчет машинного агрегата связано с определением и исследованием стационарного решения дифференциальных уравнений:
 ,
,
q - обобщенная координата, в качестве которой выбран угол поворота входного звена исполнительного механизма
 - приведенный момент инерции
- приведенный момент инерции
 - приведенный момент сил сопротивления
- приведенный момент сил сопротивления
приведенная динамическая характеристика двигателя:

 - постоянная времени двигателя
- постоянная времени двигателя
 - крутизна статической характеристики двигателя
- крутизна статической характеристики двигателя
 – скорость ротора двигателя,
– скорость ротора двигателя,
 – движущий момент,
– движущий момент,
 – номинальный движущий момент,
– номинальный движущий момент,
 – номинальная скорость ротора двигателя,
– номинальная скорость ротора двигателя,
 – постоянная времени двигателя.
– постоянная времени двигателя.
В итоге в уравнении остаются две неизвестные величины – движущий момент  и угол поворота кривошипа с его производными. Для решения уравнения движения необходимо задать дополнительное соотношение между этими неизвестными.
и угол поворота кривошипа с его производными. Для решения уравнения движения необходимо задать дополнительное соотношение между этими неизвестными.
Уравнение, устанавливающее связь между движущим моментом и скоростью двигателя, есть уравнение механической характеристики двигателя.
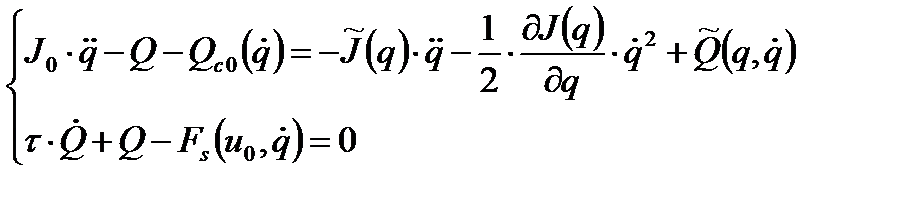
Исходя из вышесказанного, можно записать следующую систему дифференциальных уравнений:
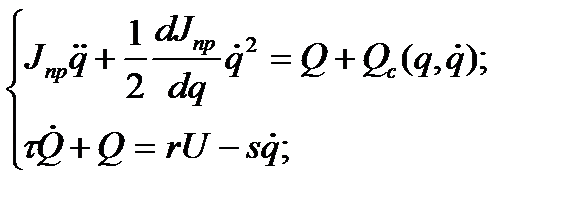
Второе выражение в системе называется динамической характеристикой двигателя. Параметр τ называется электромагнитной постоянной времени. Параметр  называется крутизной характеристики двигателя. Чем больше крутизна двигателя, тем слабее изменение нагрузки влияет на величину угловой скорости.
называется крутизной характеристики двигателя. Чем больше крутизна двигателя, тем слабее изменение нагрузки влияет на величину угловой скорости.
3.Определение коэффициентов уравнения движения машины
Определение приведенного момента инерции  производится через определение кинетической энергии всего механизма:
производится через определение кинетической энергии всего механизма:
Приведенный момент инерции:


Производная приведенного момента инерции:
 .
.
Полученная функция раскладывается в ряд Фурье с точностью до пяти гармоник:
 ;
;
 ;
;
 ;
;
 ;
;
Получены коэффициенты
| Jci | Jsi |
| -0.8224 | 2.1368 |
| -0.941 | -3.7203 |
| 2.2234 | 0.1136 |
| -0.2333 | 0.7535 |
| -0.191 | -0.1406 |
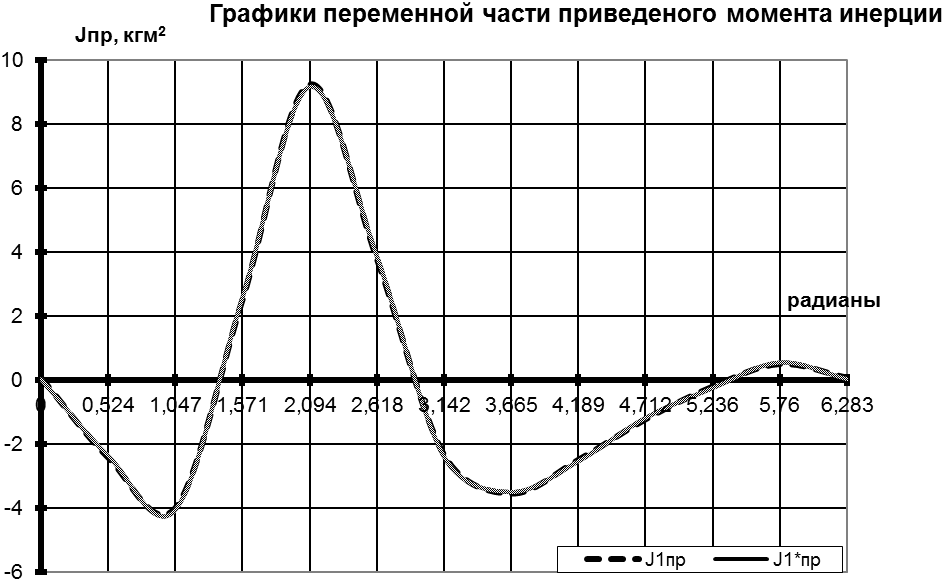
Построим график зависимости приведенного момента инерции от угла поворота кривошипа
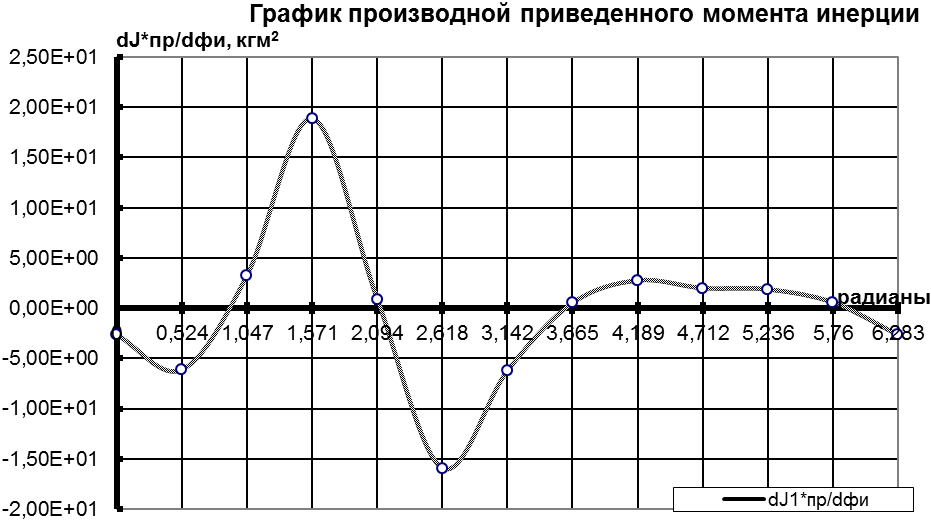
Построим график зависимости производной приведенного момента инерции от угла поворота кривошипа
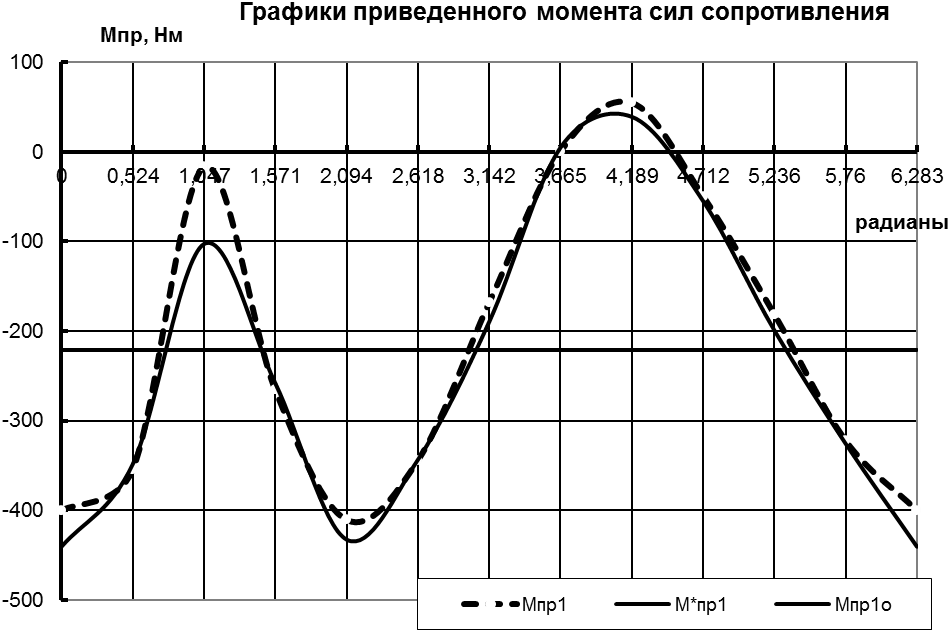
Приведенный момент сил сопротивления
 .
.
Приведенный момент сил сопротивления определяется как коэффициент при вариации обобщенной координаты в выражении для возможной работы активных сил сопротивления (рабочей нагрузки и сил тяжести), составим выражение для нахождения сил сопротивления:

Приведенный движущий момент
 .
.
В ряд Фурье с точностью до пяти гармоник также раскладывается момент сил сопротивления:
 ;
;
 ;
;
 ;
;
 ;
;
Получены коэффициенты
| Qci | Qsi |
| -82.6212 | -118.9549 |
| -79.2832 | 129.0199 |
| -57.0704 | -27.9399 |
| -14.8752 | -35.0374 |
| 14.2174 | -10.6149 |
Построим график зависимости производной приведенного момента инерции от угла поворота кривошипа
4 Решение уравнений движения машины
Система дифференциальных уравнений движения содержит две неизвестные функции времени  и
и  . Для отыскания стационарного решения этих уравнений воспользуемся методом последовательных приближений.
. Для отыскания стационарного решения этих уравнений воспользуемся методом последовательных приближений.
В нулевом приближении, т.е. при  получаем систему уравнений
получаем систему уравнений
Решение этой системы уравнений будем искать в виде
 ;
;
 ;
;
 ;
;

 .
.
После подстановки получим
При  получим систему уравнений:
получим систему уравнений:
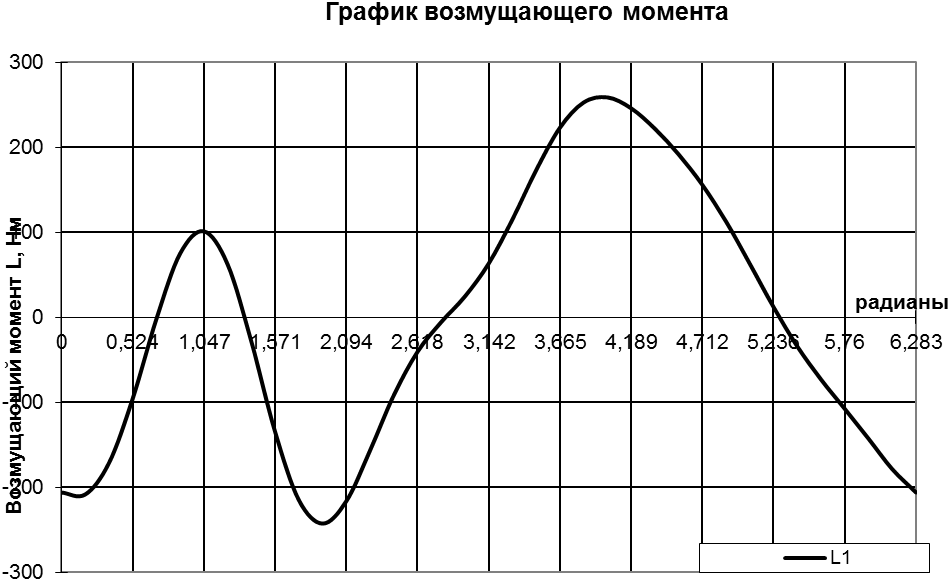
Выражение, стоящее в правой части первого уравнения, характеризует возмущение, вызывающее отклонение закона движения входного звена от программного вращения. Возмущающий момент:

Этот момент характеризует внутреннюю виброактивность исполнительного механизма.
Решение системы уравнений в первом приближении разыскиваем в виде:
 ;
;
 ;
;
 ;
;
 .
.
Здесь  - отклонение закона движения входного звена от программного движения, называемое динамической ошибкой по углу;
- отклонение закона движения входного звена от программного движения, называемое динамической ошибкой по углу;  - отклонение движущего момента от среднего значения. Подставив эти решения в систему уравнений, получим:
- отклонение движущего момента от среднего значения. Подставив эти решения в систему уравнений, получим:
где 
Разложим возмущающий момент в ряд Фурье с точностью до пяти гармоник:

 ,
,  ,
,
 ,
,  .
.
Построим график зависимости возмущающего момента инерции от угла поворота кривошипа
Далее найдем динамическую ошибку по углу с точностью до пяти гармоник:
Приравняем коэффициенты при cos и фазы:
 ,
,  .
.
Окончательно получаем:

 .
.
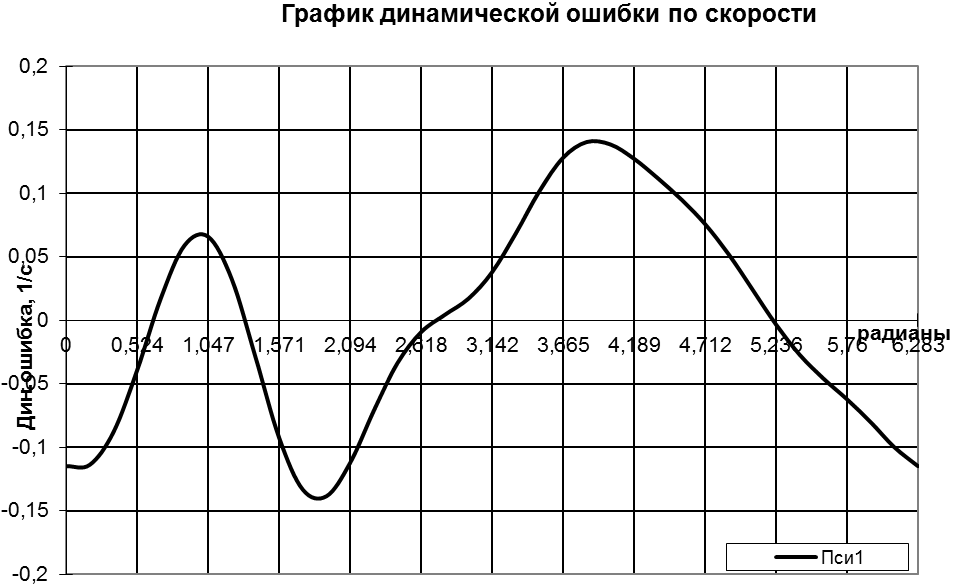
Построим график зависимости динамической ошибки по скорости от угла поворота кривошипа
В технических требованиях к машине часто задаются допустимые значения максимальных динамических ошибок, оцениваемые коэффициентом неравномерности вращения входного звена:

В данном случае соблюдается
5. Определение динамических нагрузок машины
Важной динамической характеристикой установившегося движения являются динамические нагрузки в передаточном механизме. Их можно определить из уравнения вращательного движения ротора двигателя:


где  - момент инерции ротора двигателя и передаточного механизма, приведенный к входному звену. Тогда:
- момент инерции ротора двигателя и передаточного механизма, приведенный к входному звену. Тогда:

Поскольку:
 ,
,
то:

= 
где  - механическая постоянная привода.
- механическая постоянная привода.
Движущий момент в приводе с точностью до пяти гармоник:

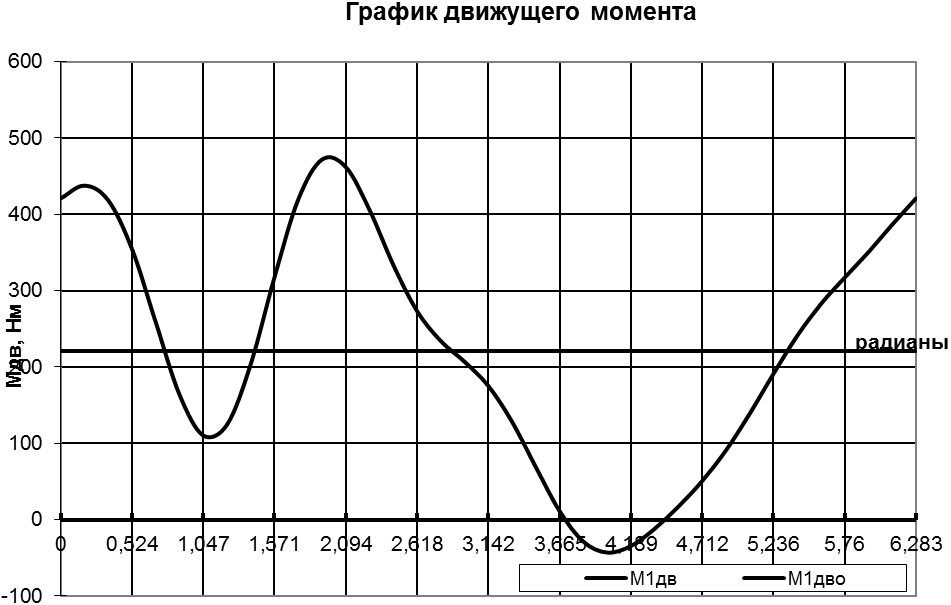
Основное требование конструирования: знакопостоянство движущего момента, обеспечивающее, отсутствие перекладки зазоров в зубчатых передачах редуктора. Нарушение условия  ведет к быстрому износу передач.
ведет к быстрому износу передач.








