 2015-10-16
2015-10-16 732
732Гироскопом называется быстро вращающееся тело, ось вращения которого может изменять своё положение в пространстве. Обычно одна из точек оси гироскопа бывает закреплена, её называют точкой опоры гироскопа.
Гироскоп называется свободным, если момент внешних сил равен нулю ( = 0) и если его центр масс совпадает с точкой опоры. Наибольшее значение в науке и технике имеют симметричные гироскопы, обладающие симметрией вращения относительно некоторой оси, называемой геометрической осью гироскопа или осью симметрии гироскопа.
= 0) и если его центр масс совпадает с точкой опоры. Наибольшее значение в науке и технике имеют симметричные гироскопы, обладающие симметрией вращения относительно некоторой оси, называемой геометрической осью гироскопа или осью симметрии гироскопа.
При равенстве нулю момента внешних сил момент импульса гироскопа остается неизменным. Таким образом, если привести гироскоп в быстрое вращение относительно его оси симметрии, то ось гироскопа не должна менять своего положения в пространстве.
Гироскоп состоит из ротора (тела гироскопа, вращающегося относительно его оси симметрии) и системы колец, называемых кардановым подвесом. Карданов подвес позволяет расположить ротор гироскопа так, что его ось может принимать любое положение в пространстве.
|
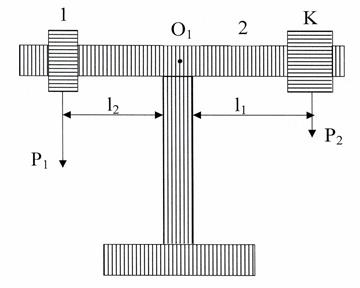 Ротор 1 закреплён на стержне 2, который может вращаться в горизонтальной и вертикальной плоскостях (рис. 2). Для того, чтобы центр тяжести устройства совпадал с точкой опоры О 1, на противоположном конце стержня имеется противовес в виде груза К, который можно перемещать вдоль стержня.
Ротор 1 закреплён на стержне 2, который может вращаться в горизонтальной и вертикальной плоскостях (рис. 2). Для того, чтобы центр тяжести устройства совпадал с точкой опоры О 1, на противоположном конце стержня имеется противовес в виде груза К, который можно перемещать вдоль стержня. Если на этой установке уравновесить гироскоп противовесом К, то результирующий момент сил, действующих на систему, будет равен нулю, т.е.:
Р 1 l 1 = P 2 l 2, (2.9)
где Р 1 – сила тяжести ротора относительно оси гироскопа, P 2 – сила тяжести противовеса.
Гироскоп обладает постоянным моментом количества движения L, совпадающим по направлению с угловой скоростью. Таким образом, при отсутствии момента внешних сил гироскоп сохраняет положение своей оси в пространстве.
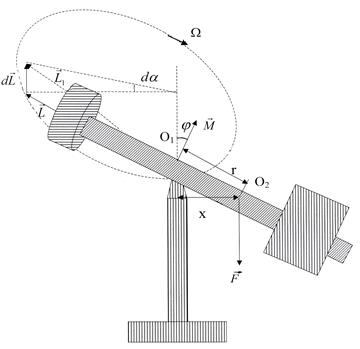
Если передвинуть противовес на небольшое расстояние от положения равновесия, то центр тяжести системы переместится в точку О 2 (рис. 3). Равновесие при нарушится и ось гироскопа наклонится на угол φ.
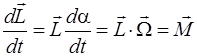
 Из уравнения динамики вращательного движения (2.8) следует, что изменение момента количества движения
Из уравнения динамики вращательного движения (2.8) следует, что изменение момента количества движения  за время dt совпадает по направлению с вектором . По прошествию времени dt момент импульса гироскопа станет равным
за время dt совпадает по направлению с вектором . По прошествию времени dt момент импульса гироскопа станет равным  .
.
|
и т.д. В результате ось гироскопа будет непрерывно вращаться с некоторой угловой скоростью Ω. Такое движение называется процессией. Величина  (2.10)
(2.10)
называется угловой скоростью процессии. Из рис. 3 видно, что dL = Ld α, поэтому уравнение (2.8) можно записать в виде
 (2.11) следовательно:
(2.11) следовательно:
 . (2.12)
. (2.12)
Таким образом, угловая скорость вращения гироскопа относительно вертикальной оси (угловая скорость процессии) прямо пропорциональна моменту силы и обратно пропорциональна моменту импульса  .
.
В общем случае связь между , и  выражается уравнением:
выражается уравнением:
= [ , ]. (2.13)








