 2015-10-13
2015-10-13 1762
1762В режиме разделения нагрузки обе ЭУМ системы управления осуществляют обработку различных вызовов параллельно. При этом они полностью равноправны как по выполняемым функциям, так и по отношению к ПУУ и ВУ. т.е. они могут независимо друг от друга обращаться к ПУУ и ВУ с целью приема и передачи информации.
Организацию связи двухмашинного управляющего комплекса с ПУ и ВУ при работе в режиме разделения нагрузки можно продемонстрировать на рисунке (рис.10)
Независимая работа обеих ЭУМ в данном режиме создает конфликтные ситуации при одновременном обращении двух ЭУМ кодним и тем же ПУ, ЗУ и к информации в основной памяти каждой ЭУМ. Для исключения этого конфликта обе ЭУМ работают во времени со сдвигом по фазе. Сдвиг фаз работы машин выбирается так, что когда одна ЭУМ производит обмен информацией с ПУ, то другая ЭУМ обрабатывают ранее принятую от ПУ информацию. Фазы обмена информацией и ее обработки в каждой машине могут начаться только по окончанию соответствующих фаз во второй ЭУМ. В связи с этим в каждой ЭУМ возникают периоды ожидания, в течение которых она не выполняет полезной работы.
Диаграмма работы двухмашинного управляющего комплекса в режиме разделения нагрузки представлена на рисунке 11.
Таким образом, для реализации этого режима работы используются 2 способа:
1) Временное разделение нагрузки, при котором каждая ЭУМ может принимать, обрабатывать сообщения от всех ПУ.
2) Пространственное разделение нагрузки. При данном способе ЭУМ может принимать и обрабатывать информацию только от части (примерно от половины) ПУ. Конкретные ПУ закрепляются за ЭУМ логическим путем с помощью занесения номеров (адресов) ПУ, с которыми может работать данная ЭУМ, в ее основную память.
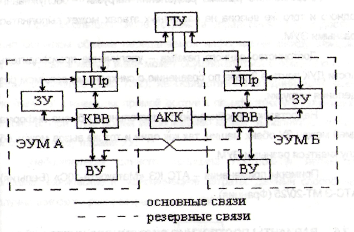
Рис.10. Режим разделения нагрузки.
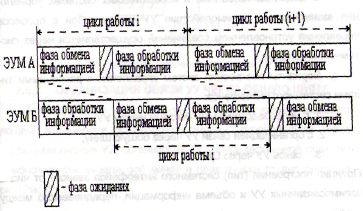
Рис.11. Диаграмма работы.
Особенность режима разделения нагрузки - обслуживание одного и того же вызова на различных этапах может выполняться разными ЭУМ.
Достоинство данного режима - увеличение производительности двухмашинного управляющего комплекса почти в 2 раза по сравнению с синхронным режимом разделения нагрузки.
Недостаток - необходимость постоянного обмена информацией между ЗУ обеих машин, так как один и тот же вызов может обслуживаться разными ЭУМ.
Примеры применения - АТС КЭ «Метаконта-10С» (Бельгия); АТС-Э МТ-20/25 (Франция).
5. ВАРИАНТЫ ПОСТРОЕНИЯ СИСТЕМНОГО ИНТЕРФЕЙСА.
В децентрализованных и иерархических системах управления взаимосвязь и взаимодействие УУ между собой в процессе управления установлением соединений осуществляется через системный интерфейс.
Варианты построения систем управления с различными типами системного интерфейса:
1. с непосредственными связями между УУ;
2. с организацией связи УУ через общую шину;
3. связь УУ через ЦКП.
Принцип построения (тип) системного интерфейса зависит от числа взаимосвязанных УУ и объема информации, передаваемого между ними.

