 2015-10-22
2015-10-22 525
525На рис. 1.5 показано механізм більш високого класу і порядку.

Рис. 1.5. Структурна схема важільного механізму з базовою ланкою. Назви ланок: 1 – кривошип (повний оберт); 2 – шатун (плоско-паралельний рух); 3 – коромисло (неповний оберт); 4 – шатун (плоско-паралельний рух); 5 – базова ланка (плоско-паралельний); 6 – коромисло (неповний оберт); 7 – повзун (поступальний); 8 – стояк (нерухома ланка)
Цей механізм складається з механізму 1го класу (рис. 1.6.а), діади 1го виду (рис. 1.6.б) і тріади (рис. 1.6.в), яка має 3-й клас і 3-й порядок. Тому механізм, наведений на рис. 1.5, належить до 3-го класу 3-го порядку.



а) б) в)
Рис. 1.6. Аналіз механізму за допомогою груп Ассура: а – механізм 1го класу; б – група Ассура 2го класу, 1го виду; в – група Ассура 3го класу
2. Структурний аналіз кулачкового механізму.
Для дослідження кулачкового механізму необхідно:
а) скласти структурну схему;
б) визначити клас кінематичних пар;
в) визначити ступінь рухомості механізму;
г) побудувати структурну схему замінюючого механізму та виділити групи Ассура.
Слід пам'ятати, що кулачок і штовхач складають пару 4-го класу, крім того в кулачкових механізмах можуть бути ланки, які надають механізму зайву ступінь рухомості.
Розглянемо приклад №3:
а) структурна схема кулачкового механізму наведена на рис. 1.7.

Рис. 1.7. структурна схема кулачкового механізму. Назви ланок: 1 – кулачок (обертальний рух); 2 – штовхач (поступальний рух); 3 – стояк (нерухома ланка)
б) кінематичні пари, які з’єднують ланки 3-1 та 2-3, відносяться до п’ятого класу і лише ланки 1-2 з’єднані кінематичною парою четвертого класу;
в) ступінь рухомості механізму визначаємо за формулою Чебишева (1.2):
 .
.
Наведений кулачковий механізм має ступінь рухомості рівний одиниці.
г) для визначення класу механізму побудуємо замінюючу структурну схему: замість кінематичної пари четвертого класу вводимо додаткову ланку 2¢ з двома кінематичними парами п’ятого класу. Тоді структурна схема буде такою, як наведена на рис. 1.8,б.

Рис. 1.8. Побудова структурної схеми замінюючого механізму: а – основний зубчастий механізм А, В, С та замінюючий його чотириланковий механізм А, В ', В '', С; б – основний кулачковий механізм з штовхачем, що поступально рухається А, В, С та замінюючий його чотириланковий механізм А, В 1', В 2', С; в – основний кулачковий механізм з коромисловим штовхачем А, В, С та замінюючий його чотириланковий механізм А, В 1', В 2', С.
Кулачковий механізм складається з механізму 1го класу і діади 2го виду (рис.1.9а та рис.1.9б). Тому це механізм 2го класу 2го порядку.

А) б)
Рис. 1.9. Аналіз кулачкового механізму за допомогою груп Ассура.
3. Структурний аналіз зубчастого механізму.
Дослідження проводимо по плану:
а) складаємо структурну схему механізму вивчивши конструкцію передачі (характер розташування осей, напрямок і форму зубців);
б) визначимо передавальне відношення:
 (1.5)
(1.5)
де Z 1 і Z 2 – число зубців ведучого і веденого колеса.
В формулі (1.5) знак “+” – для внутрішнього зачеплення, а знак “–” – для зовнішнього;
в) визначаємо тип кінематичних пар;
г) визначаємо ступінь рухомості механізму;
д) складаємо замінюючу структурну схему механізму.
Приклад №4:
а) кінематична схема зубчастих механізмів з зовнішнім та внутрішнім зачепленням наведена на рис. 1.10.
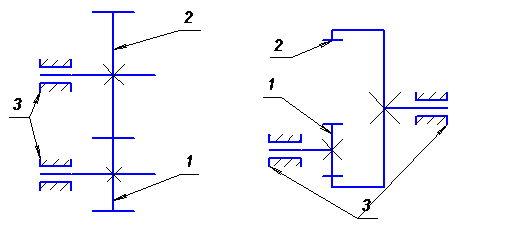
а) б)
Рис. 1.10. Структурні схеми зубчастого зачеплення зовнішнього (а) та внутрішнього (б). Назви ланок: 1 – ведуче зубчасте колесо (обертальний рух); 2 – ведене зубчасте колесо (обертальний рух); 3 – стояк (нерухома ланка).
б) передавальне число розраховується за допомогою формули (1.5).
в) кінематичні пари, які з’єднують ланки 3-1, 2-3 відносяться до п’ятого класу і лише з’єднання ланок 1-2 кінематичною парою четвертого класу;
г) ступінь рухомості механізму визначаємо за формулою Чебишева (1.2):
.
Наведений зубчастий механізм має ступінь рухомості рівний одиниці.
д) для побудови замінюючої структурної схеми замість кінематичної пари четвертого класу вводимо додаткову ланку 2¢ з двома кінематичними парами п’ятого класу. Тоді структурна схема буде такою, як наведена на рис. 1.8а.

Рис. 1.11. Структурний аналіз зубчастого механізму за групами Ассура
Зубчастий механізм складається з механізму 1го класу і діади 1го виду, 2го порядку (рис.1.11). Тому це механізм 2го класу 2го порядку.
Зміст звіту
1. Скласти структурну схему механізму.
2. Визначити кількість ланок і назвати їх в залежності від виду руху.
3. Визначити кінематичні пари, як показано в табл. 1.1 і табл. 1.2.
4. Розрахувати ступінь рухомості механізму.
5. Виділити групи Ассура та визначити їх клас та порядок, а також визначити клас механізму.
Контрольні питання
1. Що таке кінематична пара?
2. Клас кінематичної пари. Як визначається? Навести приклади.
3. Кінематичні ланцюги. Класифікація.
4. Ступінь рухомості плоских і просторових механізмів.
5. Група Ассура. Розподіл механізму на групи за методом Ассура.
6. Види діад. Приклади механізмів, складених з діад.
7. Як визначається клас механізму?
Список літератури
1. Аротоболевский И.И. Теория механизмов и машин. – М.: Наука, 1988. – с. 21–63.
2. Теория механизмов и механика машин. // Под ред. Фролова К.В. – М.: Высшая школа, 1998. – с. 38–61.
3. Кожевников С.Н. Теория механизмов и машин. – М.: Машиностроение, 1964. – с. 21–63, 178–179.








