 2015-10-22
2015-10-22 556
556Розглянемо задачу виявлення об’єкту акустичним активним методом. Схема реалізації активного методу локації відповідає побудові типової схеми АІС (рис.2.3.) яка складається з підсистеми формування зондуючого сигналу(ПФС), електроакустичного перетворювача-випромінювача акустичних хвиль (ЕАПВ), акустичного каналу (АК), об’єкту спостереження(ОС), електроакустичного перетворювача-приймача акустичних хвиль (ЕАПП), приймальному пристрою (ПП), пристрою обробки та відображення інформації(ПОВІ).
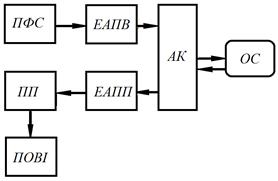
Рис.2.3.Типова структурна схема АІС активної локації.
В активних АІС використовують неперервні або імпульсні модульовані акустичні сигнали. Сигнали характеризуються періодом локації Т, тривалістю імпульсного сигналу  , та смугою частот
, та смугою частот  . На вході АП діє адитивна сума сигналу та завади. Ці сигнали статистично не залежні та описуються нормальним законом розподілу щільності ймовірностей. Інтенсивність прийнятого сигналу
. На вході АП діє адитивна сума сигналу та завади. Ці сигнали статистично не залежні та описуються нормальним законом розподілу щільності ймовірностей. Інтенсивність прийнятого сигналу  може змінюватись від максимального значення
може змінюватись від максимального значення  , яке дорівнює інтенсивності випромінювання, до інтенсивності завади
, яке дорівнює інтенсивності випромінювання, до інтенсивності завади  , яка визначається рівнем фонового шуму середовища. Локаційна задача зводиться до виявлення об’єктів спостереження у часі та просторі. В інформаційній постановці виявлення пов’язане із зміною кількості інформації
, яка визначається рівнем фонового шуму середовища. Локаційна задача зводиться до виявлення об’єктів спостереження у часі та просторі. В інформаційній постановці виявлення пов’язане із зміною кількості інформації  , а роздільна здатність залежить від максимальної швидкості передачі інформації
, а роздільна здатність залежить від максимальної швидкості передачі інформації  .
.
Задачу локації розглядаємо як обмін інформації між випромінювачем та приймачем за наявності або відсутності об’єкту спостереження. У разі відсутності об’єкту прийняте повідомлення має інтенсивність  . Кількість отриманої інформації, з урахуванням (2.22), дорівнює нулю:
. Кількість отриманої інформації, з урахуванням (2.22), дорівнює нулю:
 (2.28)
(2.28)
Поява на приймачі відбитого (луна) сигналу, імпульсна потужність якого перевищує середню потужність завади  , приводить до збільшення кількості інформації до величини:
, приводить до збільшення кількості інформації до величини:
 , (2.29)
, (2.29)
Збільшення кількості інформації будемо інтерпретувати як виявлення об’єкту. Підвищення роздільної здатності пов’язане з розширенням смуги частот АІС, тобто потребує підвищення інформаційної швидкості:
Якщо ускладнити задачу і ввести просторове сканування, так що загальний час локації Т збільшиться, то кількість інформації також збільшиться при постійному значенні інформаційної швидкості каналу. У разі виявлення рухомого об’єкту полоса частот прийнятого сигналу розширюється за рахунок ефекту Допплера, що приведе до необхідності збільшення кількості та швидкості передачі інформації. Пропускна здатність АК - максимальна швидкість передачі інформації, обмежена величиною записаною в (2.24):
 .
.
Збільшити пропускну здатність можна за рахунок підвищення енергетичного відношення сигнал/завада (СЗ). Це відношення може бути збільшене за рахунок зменшення густини спектральної потужності завади  , або збільшенням потужності випромінюваного сигналу . Мінімальне значення спектральної потужності завади визначається тепловим шумом акустичного каналу. Для термодинамічної інформаційної системи потужність теплового шуму в акустичному каналі
, або збільшенням потужності випромінюваного сигналу . Мінімальне значення спектральної потужності завади визначається тепловим шумом акустичного каналу. Для термодинамічної інформаційної системи потужність теплового шуму в акустичному каналі  , дорівнює:
, дорівнює:
 , (2.30)
, (2.30)
де  - постійна Больцмана,
- постійна Больцмана,  - температура середовища. Наприклад, потужність теплового шуму для температури середовища
- температура середовища. Наприклад, потужність теплового шуму для температури середовища
=2730 К в полосі частот 1 Гц складає:  .
.
Отримане рівняння (2.30) дозволяє розрахувати енергію теплового шуму, яка визначає також мінімум потужності одиничного інформаційного повідомлення, тобто біту інформації. Покажемо, що для передачі одного біту інформації потрібна енергія, яка дорівнює тепловій енергії шуму. З рівняння (2.2) відомо що кількість інформації, яку несе символ з двома рівно ймовірними станами  , дорівнює:
, дорівнює:  . Припустимо що смуга частот сигналу та системи однакові і дорівнюють . Інформаційна швидкість сигналу
. Припустимо що смуга частот сигналу та системи однакові і дорівнюють . Інформаційна швидкість сигналу  . Підставимо її в рівняння пропускної здатності каналу (2.22) та отримаємо значення потужності
. Підставимо її в рівняння пропускної здатності каналу (2.22) та отримаємо значення потужності  інформаційного символу:
інформаційного символу:
 (2.31)
(2.31)
Таким чином можна зробити висновок, що передача інформації означає передачу енергії, а її мінімальне значення дорівнює енергії теплового шуму акустичного каналу.
Крім теплових шумів у акустичному каналі присутні інші завади. Загальну енергетику завад, незалежно від фізики походження завад та за умови відсутності статистичного зв’язку між ними, можна знайти простою сумою енергій  складових:
складових:
 (2.32)
(2.32)
Це рівняння використовують також для оцінки шумів у всій системі, за умови відсутності статистичного зв’язку між шумами окремих блоків системи та знаючи потужність шуму в кожному із них. Збільшення потужності завади зменшує інформаційну пропускну здатність(2.23) та об’єм (2.26) інформаційної системи в цілому.
Збільшити інформаційний об’єм можна піднявши потужність випромінювання сигналу. Збільшення потужності випромінюваного сигналу обмежене технічною можливістю випромінювача, фізичними властивостями акустичного середовища, екологічними та іншими вимогами до інформаційної системи. У практичних задачах акустичної локації треба враховувати зменшення швидкості передачі повідомлень із-за обмежень, що накладають технічні засоби формування, підсилення, випромінювання сигналів та фізичні властивості акустичного каналу. Наприклад, в гідроакустиці, із-за кавітації, обмеження по інтенсивності неперервного сигналу [4] дорівнює 0.3 Вт/см2, а імпульсного - 0.7 Вт/см2. В медичних діагностичних приладах встановлено обмеження по інтенсивності випромінювання – 50 мВт/см2.
На практиці інформаційні параметри залежать також від смуги частот пропускання системи. Основне обмеження по смузі частот в АІС вносять випромінювачі та приймачі акустичних хвиль - електроакустичні перетворювачі. Смуга частот більшості електроакустичних перетворювачів (ЕАП) не перевищує десяти відсотків їх резонансної частоти.
Суттєве обмеження по смузі частот в АІС вносить також поглинання енергії в акустичному каналі. Відомо, що поглинання у більшості середовищ має степеневу залежність від частоти, та швидко збільшується з ростом частоти. Розширення смуги частот за рахунок використання низькочастотного діапазону в задачах локації обмежена технічними можливостями побудови ЕАП з великими хвильовими розмірами, а також збільшенням інтенсивності акустичних шумів. Тому смуга частот в АІС суттєво обмежена як по низьким так і по високим частотам та визначається для кожної конкретної задачі з урахуванням фізичних властивостей середовища та характеристик ЕАП.
Задача виявлення об’єкту акустичним пасивним методом реалізується типовою схемою пасивної локації, приведеною на рис.2.4.

Рис.2.4. Типова схема пристрою пасивної локації.
Об’єкт спостереження (ОС) випромінює хвилі, які по акустичному каналу(АК) досягають акустичного приймача (ЕАПП). На вхід ЕАПП разом з корисним сигналом поступає акустична завада. Електрична суміш сигналу та завади з виходу ЕАПП поступає на приймальний пристрій (ПП) та пристрій обробки та візуалізації інформації(ПОВІ). Так як ОС не відомий то характеристики сигналу (амплітуда, частота, фаза) невідомі та випадкові. Як правило корисний акустичний сигнал, що діє на вході ЕАПП, має шумову структуру з інтенсивністю близькою до інтенсивності завади. Тому отримання інформації про об’єкт зводиться спочатку до виявлення ПП сигналу замаскованого завадою (див. розділ 4). В подальшому в ПОВІ розраховується кількість отриманої інформації з урахуванням полоси частот приймача, співвідношення СЗ та часу спостереження. Кількість отриманої інформації визначається алгоритмом обробки вхідного сигналу, вибір якого зводиться до підвищення енергетичного співвідношення СЗ. Швидкість та кількість отриманої інформації в пасивній АІС залежить від тих же факторів, що і для активних систем локації. Враховуючи те, що інформація отримується від невідомого джерела акустичних хвиль, тому треба вибирати багато характеристик шумового сигналу на основі апріорних даних. Тобто, смугу частот інформаційного сигналу, потужність джерела, час спостереження вибирають на основі попередніх даних під конкретну задачу.








