 2018-01-21
2018-01-21 2558
2558Мета роботи
Освоїти методику складання структурних і кінематичних схем механізмів з використанням стандартних умовних позначок; вивчити основні принципи структурного аналізу й синтезу механізмів, виявити й усунути надлишкові (зайві) зв'язки.
Теоретичні відомості
Проектування нових, а також аналіз існуючих механізмів починають з складання структурних схем. Структурна схема механізму - умовне зображення, на якому зазначені стійка, рухливі ланки, види кінематичних пар, їхнє взаємне розташування. При графічному зображенні структурної схеми обов'язкове застосування умовних позначок ланок і кінематичних пар за ДСТ 2.770-68. Структурну схему можна представити у вигляді аналітичного запису.
При зображенні структурної схеми механізму звичайно не дотримують співвідношень між розмірами ланок; конфігурація окремих ланок визначається тільки взаємним розташуванням кінематичних пар, які з'єднують ланку з іншими ланками механізму. Структурна схема дає можливість установити число ланок, кінематичних пар і їхній клас, вид відносних рухів ланок механізму. По ній можна визначити число ступіней вільності механізму.
Для виконання кінематичного аналізу — визначення руху ведених ланок по заданому русі початкових ланок — користуються кінематичними схемами. Вони відрізняються від структурних схем тим, що на них повинні бути зазначені розміри ланок, необхідні для кінематичного аналізу механізму. Для побудови кінематичної схеми необхідно вибрати масштабний коефіцієнт довжин, що є відношенням натуральної довжини якої-небудь ланки в метрах до відрізка, що зображає цю ланку на кресленні в міліметрах. Масштабний коефіцієнт довжин позначають mі, його розмірність — м/мм.
Для побудови кінематичної схеми необхідно з'ясувати, які геометричні розміри визначають величини лінійних і кутових переміщень ланок механізму. У плоских механізмах - це відстані між осями обертальних кінематичних пар, постійні кути між окремими плечима ланок, радіуси кривизни, що визначають конфігурацію ланок, положення нерухомих напрямних, тощо. Ланки й кінематичні пари на схемі варто нумерувати. Рухливим ланкам привласнюють номера 1, 2,..., i,j, а стійці — О. Кінематичні пари позначають двома цифрами, що представляють номера ланок, що утворили цю кінематичну пару, поставивши їх у дужки.
Креслення кінематичної схеми треба починати з нанесення на креслення нерухомих елементів кінематичних пар, тобто елементів, що належать стійці. Вибрати систему координатних осей х, y, початок якої зручно помістити в центрі якої-небудь обертальної пари, утвореної початковою ланкою й стійкою. Під кінематичною схемою раціонально вказати значення визначальних її розмірів: лінійних — у міліметрах, кутових — у градусах.
Структурний аналіз механізму починають із визначення його числа степенів вільності W. У загальному випадку для просторових механізмів
| W = 6n-ΣYi(6-i)pi | (1.1) |
де п — число рухливих ланок механізму,
pi — число кінематичних пар, рухливість яких дорівнює i.
Якщо на рух всіх ланок механізму в цілому накладена певна кількість загальних зв'язків, то ця обставина повинна бути врахована при підрахунку ступіней вільності окремих ланок і всього механізму. У подібних випадках з кожного коефіцієнта формули (1.1) варто відняти число загальних зв'язків.
Плоскими називають механізми, ланки яких роблять плоский рух паралельно однієї й тієї ж нерухомої площини. У цьому випадку ланки не можуть робити обертових рухів навколо двох взаємно перпендикулярних осей координат, що визначають нерухому площину, і поступальних рухів уздовж осі, перпендикулярної до них, тобто на ланки цих механізмів у цілому накладені три загальні умови зв'язку. Віднімаючи з кожного члена формули (1.1) це число зв'язків, одержимо формулу П. Л. Чебишева для визначення 
 ступіней вільності плоских механізмів:
ступіней вільності плоских механізмів:
| W = 3n - 2 pi – pi | (1.2) |
У плоских механізмах пари 5-го класу звичайно є нижчими, а 4-го класу - вищими. У нашому прикладі п = 5; pi = 6; р2 = 2; отже, W = 1. За вхідну ланку прийнято кулачок 1, якому повідомляють рух, перетворений механізмом у необхідний рух інших ланок.
При наявності в механізмі вищих кінематичних пар, кожна з них повинна бути замінена однією ланкою, що входить у дві нижчі кінематичні пари. Це приводить до заміни заданого механізму кінематичним еквівалентним йому механізмом, ланки якого входять лише в пари 5-го класу (одно рухливі). Така заміна для двох суміжних нескінченно малих переміщень не міняє значень переміщень, швидкостей і прискорень ланок основного механізму.
1.1. Загальні відомості
У інженерній практиці використовується велика кількість різних машин. Машина складається з одного або декількох механізмів. Так, наприклад ткацький верстат включає наступні основні механізми: батаний, створення зіву, бойовий, ламельний, відпустку і натягу основи, зміни шпуль, товарний вузол.
Розпушувально-тіпальний агрегат складається з живильника, розрихлювача, тіпального і чесального вузлів, механізму утворення полотна.
Куделеприготувальна машина включає систему м'яльних вальців і трясильний механізм.
Механізми важелів текстильних машин, як і механізми машин інших виробництв, є замкнутими контурами. Їх структура і будова досліджуються відомими в ТММ методами.
Дослідження руху механізму потрібно починати з вивчення його будови і структури.
Механізмом називається штучно створена система тіл, призначена для перетворення руху одного або декількох тіл в потрібний рух інших тіл.
Одна або декілька жорстко з'єднаних деталей, що входять в склад механізму і рухомих як одне тіло, називається рухомою ланкою. Всі нерухомі тіла в механізмі приймають за одну нерухому ланку яка називається стійкою.
Ланки механізму, положення яких визначаються безпосередньо значенням вибраних параметрів - узагальнених координат, називаються ведучими, а ланки механізму, положення і переміщення яких однозначно залежать від положень і переміщень привідних ланок - ведомими.
Ланки механізму діляться на вхідні, вихідні і проміжні, або з'єднувальні.
Вхідна ланка (скорочено вхід) - ланка, якій повідомляється рух, що перетворюється механізмом в необхідні рухи інших ланок.
Вихідна ланка (скорочено вихід) - ланка, здійснююча рух, для виконання якого призначений механізм.
Решта рухомих ланок називається з'єднувальними або проміжними.
З'єднання двох ланок, що допускає їх відносний рух утворює кінематичну пару.
Кінематичною парою називається з'єднання двох дотичних ланок, що допускає їх відносне переміщення. Поверхня, лінія, точка ланки, по яких воно дотикається з| іншою ланкою, створюють кінематичну пару, називаються елементами кінематичної пари.
Просторові кінематичні пари (по класифікації акад. І.І.Артоболєвського) підрозділяються на п'ять класів. Клас кінематичної пари визначається кількістю умов зв'язку, які накладаються парою на рух однієї ланки пари відносно іншої.
Отже, просторова кінематична пара першого класу допускає п'ять рухів (п’яти рухома пара), пара другого класу чотири рухи (чотирьох рухлива) і так далі.
Окрім цього, кінематичні пари по характеру їх елементів діляться на нижчі і вищі. Нижчими кінематичними парами називаються пари, елементами яких є поверхні, вищими - пари, елементами яких є лінії або точки.
У плоских механізмах є пари лише четвертого і п'ятого класів.
Умовне зображення (згідно ГОСТ 2770-68) деяких ланок кінематичних пар приведено в табл.1.1.
Кінематичним ланцюгом називається система ланок, зв'язаних за допомогою кінематичних пар.
Кінематичні ланцюги поділяються на плоскі і просторові, прості і складні, замкнуті і незамкнуті.
Простим кінематичним ланцюгом називається ланцюг, у якого кожна ланка входить не більше ніж в дві кінематичні пари.
Складним кінематичним ланцюгом називається ланцюг, у якого наявна аби одна ланка, що входить більш ніж в дві кінематичні пари.
Замкнутим кінематичним ланцюгом називається ланцюг, кожна ланка якої входить, принаймні, в дві кінематичні пари.
Незамкнутим кінематичним ланцюгом називається ланцюг у якого є ланки, що входять в одну кінематичну пару.
Більшість механізмів, що застосовуються в інженерній практиці, створено замкнутими кінематичними ланцюгами.
Всі механізми, як і кінематичні ланцюги, діляться на плоскі просторові.
У плоских механізмів траєкторії точок ланок лежать в паралельній площині, у просторових механізмів точки їх ланок описують неплоскі траєкторії або траєкторії, що лежать і в пересічних площинах.
Кінематична схема механізму дає цілковите уявлення про структуру механізму і визначає його кінематичні властивості. Вона являється графічним зображенням механізму за допомогою умовних зображень ланок і кінематичних пар з вказівкою розмірів, які необхідні для кінематичного аналізу механізмів.
На схемах цих механізмів ланки, як правило, зображуються відрізками прямих і нумеруються арабськими цифрами. Кінематичні пари позначаються великими літерами латинського алфавіту.
Таблиця 1
| Зображення | Найменування |
 | З'єднання двох стержнів: а - жорстке б - обертальною парою в площині руху в-обертальною парою, в площині, перпендикулярною до площини руху |
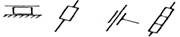 | З'єднання двох ланок поступальною кінематичною парою |
 | З'єднання двох стержнів: а - сферичним шарніром б-сферичним шарніром з |пальцем |
 | Вища кінематична пара |
 | Нероз'ємна гайка на гвинті, передаюча рух |
 | Телескопічне з'єднання двох валів |
 | Ланка з елементами: а - двох кінематичних пар б - трьох кінематичних пар |
1.2. Число ступенів свободи механізму
Число ступенів свободи показує, скільки в механізмі (без зайвих зв'язків) повинно бути провідних ланок, аби всі інші здійснили періодичні сповна певні рухи.
Число ступенів свободи механізму відносно стійки називають ступенем рухливості механізму і позначають літерою.
Ступінь рухливості плоского механізму знаходимо по формулі Чебишева:
W= 3n-2Р5 -1Р4
де n - число рухомих ланок механізму;
Р5|,Р4 - число кінематичних пар відповідно п'ятого і четвертого класу.
Після визначення ступеня рухливості механізму переходять до визначення його класу.
1.3. Класифікація плоских механізмів
Оскільки в техніці застосовується велика кількість механізмів, учені прагнули згрупувати їх по певних ознаках. Найбільш вдало це зробив Л.В.Асур. Його класифікацію розвинув акад. І.І.Артоболєвський.
По Асуру, до складу кожного механізму входять рухомі і нерухомі ланки. Рухомі ланки можуть бути вхідними, вихідними і з'єднувальними. Вхідними є ланки, з'єднані з стійкою. Процес утворення механізму будь-якої складності може бути представлено як послідовне приєднання груп ланок до початкового або наявного механізму, причому приєднані групи не повинні змінювати ступінь рухливості початкового механізму, отже, ступінь рухливості приєднаних груп ланок має дорівнювати нулю
W= 3n-2Р5 -1Р4 = 0 [1-2]
Простий механізм – двох ланковий, що є привідною ланкою, з'єднаною із стійкою кінематичною парою п'ятого класу. Його умовно назвали механізмом першого класу першого порядку. Прикладом такого механізму служить електродвигун або турбіна.
До механізмів першого класу можна приєднати групи ланок, що задовольняють рівнянню (1.2). Ці групи можуть приєднуватися як до механізму першого класу (до вхідної ланки і стійки), так і до декількох механізмів першого класу.
При структурному аналізі або синтезі механізмів наявні в механізмі кінематичні пари четвертого класу замінюють кожну однією ланкою і двома парами п'ятого класу (рис.1.1). Така заміна для двох суміжних нескінченно малих переміщень не змінює значень переміщень, швидкостей і прискорень основного механізму. Після такої заміни, механізм що отримано, називається замінюючим. Тому механізм що має в своєму складі кінематичні пари п'ятого і четвертого класів, можна замінити механізмом, що має тільки лише пари п'ятого класу (див. рис.1.1).
Тоді рівність (1.2) набирає вигляду
W= 3n-2Р5 = 0
звідки Р5 = (3/2)n
Оскільки тому що, число пар п'ятого класу має бути обов'язково цілим, то число ланок приєднуваної групи обов'язково парне. Зв'язок між кількістю ланок і кількістю пар п'ятого класу приєднуваної групи показано в табл.2, з неї видно, що простою є група з двох ланок - з'єднаних кінематичною парою п'ятого класу і що має на кінцях ланок вільні елементи пар п'ятого класу. Така група називається двох повідковою, або групою другого класу.
Таблиця 2
| n | і т.д | ||||||
| Р5 | ……………… |
У групах Асура (табл. 3) розрізняють кінематичні пари внутрішні (кінематичні пари) і зовнішні (кінематичні пари В і D). Число зовнішніх кінематичних пар, або точніше, їх елементів, якими група приєднується до ланок механізму, визначає порядок групи. Групи другого класу є групами другого порядку.
Дво повідкові групи, або групи другого класу другого порядку, ділять на п'ять видів.
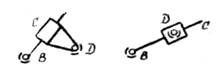
Дво повідковою групою першого класу називається група, що складається з двох ланок і трьох обертальних кінематичних пар п'ятого класу (табл. 3), наприклад батан і шатун в батаному механізмі ткацького верстата.
Якщо в двох повідковій групі першого класу замінити одну крайню обертальну пару поступальною, отримаємо двох повідкову групу другого класу (табл. 3, б). Довжина другої ланки може бути рівна і нулю; наприклад шатун і повзун в механізмі комлепідбивача.
Замінивши в двох повідковій групі першого класу середню обертальну пару поступальною, отримаємо двох повідкову групу третього класу (табл. 3, в), наприклад кулісний механізм хитання знімного гребеня.
Якщо в двох повідковій групі дві крайні пари поступальні, а середня - обертальна, така група називається двох повідковою групою четвертого класу (табл. 3, г).
Двох повідковою групою п'ятого класу називається така група з двох ланок, в якій крайня і середня пари, - поступальні –(табл. 3, д).
Приєднавши одну або декілька двох повідкових груп до механізму першого класу першого порядку, отримаємо механізм другого класу другого порядку (рис.1,1). Він складається з механізму першого класу першого порядку, двох повідкової групи другого класу (ланки 2 і 3) і двох повідкової групи першого класу (ланки 4 і 5).
Таблиця 3
| Групи Ассура | Клас | Порядок | Вид | Кількість ланок |
 | ||||
 | ||||
 | ||||
 | ||||
 | ||||
 | ||||
 | ||||
 |

Рис 1.1
Формула будови механізму має вигляд: механізм першого класу першого порядку + двох повідкова група другого класу + двох повідкова група першого класу = механізм другого класу другого порядку.
Розглянемо наступне поєднання з табл.1.2:n=4 і р5 = 6.
Поєднання з чотирьох ланок і шести кінематичних пар п'ятого класу дає можливість отримати трьома шляхами.
1, Розвитком одного з повідків двох повідкової групи в базис (табл.1.2,). Одна ланка (друга) має три кінематичні пари, до яких приєднуються повідки 1, 3 і 4. Така ланка називається базисною, а група - трьох повідковою, або групою третього класу третього порядку.


Рис 1.2 Рис 1.3
Приєднавши трьох повідкову групу (ВСDЕFК) до механізму першого класу першого порядку (рис.1.3) або до механізму другого класу другого порядку (рис.1.3). отримаємо механізм третього класу третього порядку.
Порядок механізму визначається порядком найбільш складної групи і не залежить від числа груп, що входять до складу механізму.
2. Група, що складається з чотирьох ланок і шести кінематичних пар п'ятого класу, утворює замкнутий контур і має дві базисні ланки, що несуть на вільних кінцях елементи кінематичних пар п'ятого класу (табл. 1.3, ж). Така група відноситься до груп четвертого класу, так як вона має два вільні елементи пар п'ятого класу, то являється групою четвертого класу другого порядку.
Приєднавши цю групу до механізмів першого, або третього класу, отримаємо механізм четвертого класу. Його порядок визначається порядком старшої групи.
Поєднання n = 6 і Р5 = 9 можна отримати розвитком одного з повідків трьох повідкової групи в базис (табл. 1.3, з). Група, що складається з двох базисних ланок, чотирьох повідків і дев'яти пар п'ятого класу, називається чотирьох повідковою, або групою третього класу четвертого порядку. Розвиваючи в цій групі один поводок в базис n = 8 і р5 = 12, отримаємо групу третього класу п'ятого порядку.
Розвитком одного повідка в базис можна отримати групу третього класу будь-якого порядку. У всіх групах Асура замість обертальних пар можуть бути і поступальні пари.








