 2018-01-21
2018-01-21 14633
14633Моделі механізмів, лінійка з міліметровими розподілами, циркуль, вимірник, кронциркуль, штангенциркуль, транспортирний кутомір, транспортир.
Порядок виконання роботи
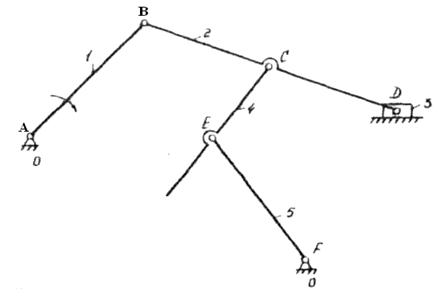
I. Викреслити схему механізму в довільному положенні ланок в масштабі, пронумерувати всі ланки і позначити літерами кінематичні пари.
2. Вивчити кінематичні пари, які з'єднують ланки заданого механізму, визначити їх клас, вказати номери і назви ланок утворюючих кінематичну пару, викреслити їх. Всі побудови і записи зробити в таблиці кінематичних пар. При підрахунку числа кінематичних пар необхідно враховувати, що число кінематичних пар у вузлі, що сполучає К ланок, Р5 = к-1
3. Підрахувати число рухомих ланок механізму без надмірних зв'язків і зайвих ступіней свободи.
Примітка.
Якщо в механізмі наявні надлишкові зв'язки або зайві ступені свободи, необхідно їх замінити і побудувати замінюючий механізм. Для замінюючого механізму виконати всі дії, вказані в пп.1-3.
4. Визначити по формулі Чебишева ступінь рухливості механізму.
5.Визначити кількість провідних ланок. Воно відповідає підрахованій ступені рухливості механізму. За ведучу обов'язково прийняти ланку, що зв'язана із стійкою.
6. Визначити клас і порядок механізму при прийнятих провідних ланках. Для вирішення цього завдання необхідно:
а/ викреслити привідні ланки із стійками і прийняти їх за механізми першого класу першого порядку;
б/ користуючись табл.1.2 поєднань ланок і кінематичних пар п'ятого класу, розчленувати ведену частину на структурні групи. Всі структурні групи викреслити окремо, вказавши їх клас і порядок.
Спочатку розглядають найменше поєднання (n = 2 і р5 = 3). Якщо в механізмі при прийнятих ведучих ланках, починаючи з другої ланки, можна виділити одну або декілька двох повідкових груп і при цьому не залишиться одиночних ланок, то такий механізм відноситься до механізму другого класу другого порядку. Може опинитися, що одна або декілька двох повідкових груп виділяються, а в частині механізму, що залишилася, при виділенні нової двох повідкової групи опиниться дві ланки поодинці в різних місцях вільними, то в цьому випадку треба розглянути друге поєднання таблиці n = 4 і р5 = 6.
7. Визначити клас механізму і записати формулу побудови механізму.
8. Зробити висновки.
9. Дослідити два різних механізми або один механізм з різними ведучими ланками.
10. Оформити протокол до лабораторної роботи.
Зміст протоколу.
Найменування і мета роботи;
Кінематична схема механізму, числові значення постійних розмірів ланок і геометричних параметрів, що визначають їх, масштабний коефіцієнт довжин;
Визначення ступеня вільності механізму; його вхідні ланки;
Заміна вищих кінематичних пар;
Структурна схема замінюючого механізму;
Визначення класів груп Асура, що входять у механізм;
Формула побудови механізму, визначення класу механізму;
Визначення числа надлишкових зв'язків;
Структурні схеми механізмів без надлишкових зв'язків;
Аналіз отриманих результатів;
Висновки.
Питання для самоконтролю
1. Що називається ланкою?
2. Що розуміють під масштабним коефіцієнтом довжини і яка його розмірність?
3.Запишіть формулу для визначення ступіней вільності механізму в загальному випадку.
4. Дайте визначення структурної групи (групи Асура).
5. Як визначають клас механізму?
6. Дати визначення кінематичної пари.
7. Вказати класифікацію кінематичних пар за числом обмежень, що накладаються на відносний рух ланок пари.
8. Розподіл пар на нижчі і вищі.
9. Що називається кінематичним ланцюгом?
10. Класифікація кінематичних ланцюгів.
11.Дати визначення механізму.
12. Дати визначення ланкам.
13. Відмінність між машиною і механізмом.
14.Поясніть формулу Чебишева, її застосування і поясніть фізичний зміст коефіцієнтів.
15. Основні ознаки, по яких Асур класифікує механізми
16. Накреслити двох повідкові групи п'яти видів і групу третього класу третього порядку.
17.Чи можна в механізмі з однією ступінню свободи змінити положення ланок групи, не змінюючи положення ведучої ланки?
18. Що визначає формула побудови механізму?
19. Які зв'язки називають надлишковими (зайвими)?
20. Як визначити число надлишкових зв'язків у механізмі?
21. Як можна усунути надлишкові зв'язки?
Зразок протоколу до лабораторної роботи № I
Структурна схема
Таблиця кінематичних пар
| Кінематичні пари | Найменування ланок, утворюючих кінематичну пару | |
| Позначення | Клас | |
 | Р5 | Стійка і кривошип |
 | Р5 | Кривошип і коромисло |
 | Р5 | Шатун і шатун |
 | Р5 | Шатун і повзун |
 | Р5 | Повзун і стійка |
 | Р5 | Шатун і коромисло |
 | Р5 | Коромисло і стійка |
Визначення ступеня рухливості механізму:
W= 3n-2Р5 -1Р4 = 3 · 5 – 2 · 7 – 1 · 0 = 1
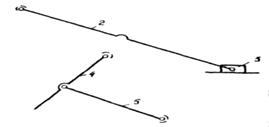
Розкладання механізму на групи Ассура з указанням їх класу, порядку і виду.

Висновок:
Механізм першого класу першого порядку + двох повідкова група другого виду + двох повідкова група першого виду = механізм другого класу другого порядку.








