 2018-01-21
2018-01-21 568
568ПРОВЕРКА ОСНОВНОГО ЗАКОНА ДИНАМИКИ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Цель работы: проверка основного закона динамики вращательного движения твердого тела с помощью маятника Обербека.
Приборы и принадлежности: установка лабораторная «Маятник Обербека», электронный блок ФМ 1/1, наборные грузы (разновесы).
Краткая теория
Маятник Обербека предназначен для изучения основного закона динамики вращательного движения твердого тела и экспериментального определения моментов инерции системы тел.
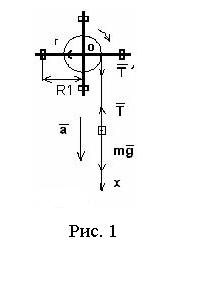 Маятник, используемый в данной работе, представляет собой маховик с двухступенчатым шкивом, осью вращения, подшипниковой системой и крестовиной из четырех металлических стержней. На стержнях закрепляются четыре цилиндра одинаковой массы на одинаковом расстоянии от оси вращения (маятник с подвешенным к нему на нити грузом условно изображен на рисунке 1).
Маятник, используемый в данной работе, представляет собой маховик с двухступенчатым шкивом, осью вращения, подшипниковой системой и крестовиной из четырех металлических стержней. На стержнях закрепляются четыре цилиндра одинаковой массы на одинаковом расстоянии от оси вращения (маятник с подвешенным к нему на нити грузом условно изображен на рисунке 1).
Вращение такого маятника относительно оси  , проходящей через центр тяжести, может быть описано основным законом динамики вращательного движения твердого тела с постоянным во времени моментом инерции:
, проходящей через центр тяжести, может быть описано основным законом динамики вращательного движения твердого тела с постоянным во времени моментом инерции:

 , (1)
, (1)
где  - результирующий момент сил, вызывающих вращение тела, относительно оси ,
- результирующий момент сил, вызывающих вращение тела, относительно оси ,  – момент инерции твердого тела,
– момент инерции твердого тела,  – проекция вектора углового ускорения на ось вращения .
– проекция вектора углового ускорения на ось вращения .
Вращение маятника вызывается силой натяжения нити  , приложенной к шкиву. Силы трения можно считать пренебрежимо малыми и не учитывать создаваемый ими тормозящий момент. Тогда результирующий момент сил равен моменту силы натяжения .
, приложенной к шкиву. Силы трения можно считать пренебрежимо малыми и не учитывать создаваемый ими тормозящий момент. Тогда результирующий момент сил равен моменту силы натяжения .
Момент силы относительно центра маятника (точка О) определяется выражением:
 .
.
Вектор 
 направлен от нас вдоль оси вращения (см. рис. 1).
направлен от нас вдоль оси вращения (см. рис. 1).
Направим ось вдоль вектора . Тогда момент силы относительно этой оси совпадет с модулем момента силы относительно центра маятника:
 , (2)
, (2)
где  - радиус шкива, на который наматывается нить.
- радиус шкива, на который наматывается нить.
Если к маятнику подвесить на нити груз массой  и отпустить, то маятник начнет вращаться с угловым ускорением
и отпустить, то маятник начнет вращаться с угловым ускорением  . При этом направление вектора углового ускорения маятника будет совпадать с направлением вектора .
. При этом направление вектора углового ускорения маятника будет совпадать с направлением вектора .
Тогда
 . (3)
. (3)
Формула (3) позволяет по двум известным величинам определить третью.
Выведем формулы, дающие возможность экспериментально определить  и
и  .
.
По третьему закону Ньютона
 ,
,
где  - сила натяжения нити, действующая на груз. Найдем эту силу, исходя из второго закона Ньютона, записанного для груза массы :
- сила натяжения нити, действующая на груз. Найдем эту силу, исходя из второго закона Ньютона, записанного для груза массы :
 .
.
В проекциях на ось 
 .
.
Подстановка (учитывая равенство  ) полученного выражения в (2) дает
) полученного выражения в (2) дает
 , (4)
, (4)
где  – линейное ускорение груза.
– линейное ускорение груза.
При запуске установки груз начинает двигаться из состояния покоя. Если с начальным положением груза связать начало координат оси , то за время  груз пройдет расстояние
груз пройдет расстояние  , равное
, равное
 ,
,
отсюда
 . (5)
. (5)
Подставляя (5) в (4), получаем для момента силы выражение
 . (6)
. (6)
Если нет проскальзывания нити, то линейное ускорение груза является тангенциальным для точек на ободе шкива. В этом случае угловое ускорение маятника может быть выражено через линейное ускорение груза:
 .
.
Тогда при учете (5)
 . (7)
. (7)
Проверка основного закона динамики вращательного движения с помощью маятника Обербека состоит из двух частей.
I. Проверка прямой пропорциональности углового ускорения маятника результирующему моменту приложенных сил
Если при постоянном моменте инерции маятника изменить массу подвешиваемого к нему груза, то согласно формуле (6), изменится и вращательный момент, действующий на маятник.
В соответствии с основным законом динамики вращательного движения (3) изменение момента силы при  приведет к изменению углового ускорения маятника:
приведет к изменению углового ускорения маятника:
 , (8)
, (8)
 . (9)
. (9)
Следовательно, меняя момент сил, можно проверить соотношение:
 . (10)
. (10)
Основной закон динамики вращательного движения (3) позволяет по известным значениям момента силы и углового ускорения определить момент инерции маятника. При этом для повышения точности в качестве момента инерции маятника целесообразно взять его среднее значение:
 , (11)
, (11)
где
 , (12)
, (12)
 . (13)
. (13)
II. Проверка обратной пропорциональности углового ускорения маятника
моменту его инерции
Если при постоянном моменте силы  изменить момент инерции маятника, то в соответствии с формулой (3) изменится его угловое ускорение:
изменить момент инерции маятника, то в соответствии с формулой (3) изменится его угловое ускорение:
 .
.
Следовательно, если взять в качестве  величину
величину  , то должно выполняться соотношение
, то должно выполняться соотношение
 . (14)
. (14)
Момент инерции маятника в работе можно изменить путем симметричного перемещения цилиндров вдоль стержней. Тогда
 , (15)
, (15)
где  - момент инерции маятника в случае, когда расстояние от центра каждого цилиндра до оси вращения равно
- момент инерции маятника в случае, когда расстояние от центра каждого цилиндра до оси вращения равно  ,
,  - средний момент инерции маятника при первоначальном расстоянии
- средний момент инерции маятника при первоначальном расстоянии  между центрами цилиндров и осью маятника,
между центрами цилиндров и осью маятника,  - масса одного цилиндра.
- масса одного цилиндра.
Примечание: Изменение углового ускорения тел при изменении положения цилиндров на стержнях скажется на значении момента силы. Однако его изменение, как показывает расчет, не превышает погрешности измерения, поэтому можно считать, что момент силы остается постоянным.
Описание установки.
Установка представлена на рисунке 2.

Рис. 2
Установка включает: основание 1, вертикальную стойку 2, верхний кронштейн 3, средний кронштейн 4, кронштейн 5 для установки фотодатчика, фотодатчик 6. Основание 1 снабжено тремя регулируемыми опорами 7 и зажимом 8 для фиксации стойки.
Вертикальная стойка 2 выполнена из металлической трубы, на которую нанесена миллиметровая шкала. По стойке может перемещаться визир 19.
На верхнем кронштейне 3 размещается узел подшипников 9 с малоинерционным шкивом 10 для изменения направления движения капроновой нити 11, на которой подвешен груз 12.
На среднем кронштейне 4 размещены: узел подшипников 13, на оси которого с одной стороны закреплен двухступенчатый шкив 14, на котором имеется приспособление для закрепления капроновой нити 11, а с другой стороны находится крестовина, представляющая собой четыре металлических стержня 15, закрепленных в бобышке 16 под прямым углом друг к другу; электромагнитный тормоз 17.
На металлических стержнях 15 через каждые 10 мм нанесены риски.
Грузы 18 закреплены на металлических стержнях 15 и могут свободно перемещаться и фиксироваться на каждом стержне, что дает возможность ступенчатого изменения момента инерции крестовины.
Электромагнитный тормоз 17 предназначен для фиксации подвижной системы в начале эксперимента, выдачи электрического сигнала начала отчета времени и торможения подвижной системы после завершения отчета времени.
Кронштейн 5 имеет зажим для крепления на вертикальной стойке 2 и элементы фиксации фотодатчика.
Установка работает от электронного блока ФМ 1/1.








