 2017-11-01
2017-11-01 786
786АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
1. Цель работы: ознакомиться с различными способами торможения асинхронного двигателя с короткозамкнутым (к.з.) ротором.
Адание
2.1. к самостоятельной работе:
- изучить и кратко описать тормозные режимы трехфазного асинхронного двигателя с к.з. ротором [3,5,7,11,13];
- вычертить принципиальные электрические схемы торможения двигателя (рис. 4.2, 4.3, 4.5,а) и составить по ним монтажные схемы, используя рис.3.3, 4.5,6;
- подготовить устные ответы на контрольные вопросы. 2.2. к работе в лаборатории:
- ознакомиться с оборудованием и приборами стенда, определить постоянные измерительных приборов;
- собрать монтажные схемы, провести испытание в соответствии с указаниями к выполнению работы;
- построить график зависимости n2=F(М), в двигательном и генераторном режимах;
- записать выводы по результатам экспериментов.
Общие сведения
Время, прошедшее с момента отключения двигателя от сети до его полной остановки, называется временем свободного выбега.
Чем больше маховые массы рабочей машины и электродвигателя и чем выше скорости их вращения, тем больше время свободного выбега. Большое время свободного выбега - это вынужденный перерыв в работе, снижающий производительность труда на данной машине. Уменьшить время свободного выбега можно, используя электродвигатель в качестве электротормоза.
Рассмотрим некоторые тормозные режимы и способы торможения электродвигателей.
Торможение с рекуперацией энергии заключается в том, что на период торможения двигатель переводится в генераторный режим и отдает электрическую энергию в сеть.
Обмотка статора остается включенной в сеть, потребляет реактивную мощность Q и создает за счет нее вращающееся магнитное поле с частотой
n1 =60צ / p, (4.1) где n1 - частота вращения магнитного поля статора, мин-1;
f - частота переменного тока сети, Гц;
р - число пар полюсов статора.
Значение числа полюсов 2р дано в обозначении типа двигателя. Например, у двигателя 4А112МА 8 УЗ 2р = 8, р = 4.
Под действием внешних сил или запасенной кинетической энергии ротор двигателя вращается в прежнем направлении. Если частоту вращения ротора n2 сделать выше n1, магнитное поле ротора будет индуктировать в обмотке статора ЭДС Е больше напряжения сети U. За счет этого изменится направление активной составляющей тока статора Iа и активной мощности Р, которая будет отдаваться в сеть и полезно использоваться другими потребителями. При этом двигатель, отдавая электрическую энергию в сеть, потребляет запасенную в системе
"двигатель - рабочая машина" механическую энергию и тормозится.
Величина тормозного момента зависит от разности частот вращения ротора и магнитного поля (рис. 4.1).
В режиме рекуперативного торможения скольжение двигателя s=(n1-n2) / n1 будет отрицательным.
Чтобы выполнить условия рекуперативного торможения (n2>n1), нужно либо увеличить n2, либо уменьшить n1.
Первый случай имеет место при опускании груза в подъемных механизмах. Двигатель включается на спуск груза и разгоняется под его действием до такой скорости, при которой тормозной момент уравновесит статический момент груза. Кроме того, рекуперативное торможение применяется при горячей обкатке двигателей внутреннего сгорания после ремонта. В этом случае увеличивая скорость вращения ДВС, переводят асинхронный двигатель в генераторный режим, чем и создают механическую нагрузку на обкатываемый двигатель.
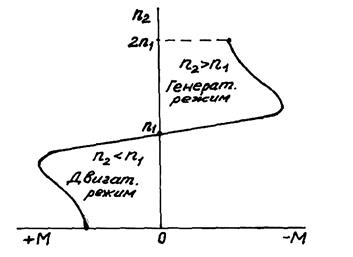
Рис. 4.1. Механические характеристики асинхронного короткозамкнутого двигателя в двигательном и генераторном режимах
Второй случай перевода двигателя в режим рекуперации применяется в многоскоростных двигателях путем переключения обмоток статора с меньшего числа пар полюсов на большее (формула 4.1). Магнитное поле снижает скорость, а ротор вследствие инерции вращается с прежней скоростью и затормаживается до n2=n1.
Динамическое торможение заключается в том, что двигатель отключается от сети трехфазного переменного тока и включается на пониженное напряжение постоянного тока (рис.4.3). Постоянный ток, протекая по обмотке статора, создает неподвижное магнитное поле. Ротор продолжает вращаться по инерции и пересекает это поле. В короткозамкнутой обмотке ротора индуктируется ЭДС и возникает ток I2, магнитное поле которого взаимодействует с магнитным полем статора Ф. В результате взаимодействия создается момент Мт, направленный против вращения ротора
Мт=К× Ф× I2, (4.2)
где К - коэффициент пропорциональности.
По мере торможения двигателя величина тормозного момента снижается и при остановке равна нулю. В этот момент времени постоянный ток нужно отключить.
Величину тормозного момента можно регулировать, изменяя постоянный ток в обмотке статора, но при большом времени торможения он не должен превышать номинальный ток двигателя. Для питания постоянным током обычно применяется выпрямитель.
Таким образом, при динамическом торможении, как и при рекуперативном, двигатель работает в генераторном режиме, но вырабатываемая электрическая энергия превращается в обмотке ротора в тепло и рассеивается в окружающем пространстве.
Торможение противовключением заключается в том, что в статоре работающего асинхронного двигателя изменяют направление вращения магнитного поля на обратное путем переключения двух любых линейных проводов сети. Ротор по инерции вращается в прежнем направлении. За счет пересечения обмотки ротора магнитным полем статора в ней индуктируется ЭДС и протекает ток, создающий при взаимодействии с полем статора тормозной момент. При полной остановке двигатель необходимо отключить от сети. В противном случае он будет разгоняться в обратном направлении, то есть произойдет реверсирование.
В процессе торможения токи в обмотках статора могут превышать номинальные в 7...8 раз. Вся энергия торможения рассеивается на активном сопротивлении обмотки ротора.








