 2017-11-01
2017-11-01 2898
28981. Цель работы: Изучить особенности пуска, механическую характеристику и способы регулирования частоты вращения двигателя постоянного тока со смешанным возбуждением.
Адание.
2.1. к самостоятельной работе:
- изучить особенности конструкции, схемы включения двигателей постоянного тока [10];
- изучить методику получения механических характеристик двигателя постоянного тока [5,11,13];
- ознакомиться с особенностями пуска и регулирования частоты вращения двигателя постоянного тока [3,5,11,13,14];
- вычертить принципиальные схемы для измерения сопротивлений цепи якоря и обмоток возбуждения (рис.6.4) и испытания двигателя (рис.6.2);
- используя рис. 6.2 и 6.3 составить монтажную схему;
- вычертить формы таблиц 6.1... 6.4;
- подготовить устные ответы на контрольные вопросы.
2.2. к работе в лаборатории:
- ознакомиться с лабораторной установкой;
- записать в таблицу 6.1. паспортные данные двигателя;
- измерить сопротивление цепи якоря и обмоток возбуждения. Данные записать в таблицу 6.1;
- собрать схему и провести исследование двигателя, данные записать в таблицы 6.2, 6.3, 6.4;
- построить естественную механическую характеристику n=f(M) и скоростные характеристики n=f(IB) и n=f(U);
- сделать выводы по результатам исследования.
Общие сведения.
Двигатели постоянного тока в отличие от двигателей переменного тока (прежде всего асинхронных) имеют большую кратность пускового момента и перегрузочную способность, обеспечивают плавное регулирование частоты вращения рабочей машины. По этому они применяются для привода машин и механизмов с тяжелыми условиями пуска (например, в качестве стартеров в двигателях внутреннего сгорания), а также при необходимости регулирования частоты вращения в больших пределах (механизмы подачи станков, обкаточно-тормозные стенды, электрифицированные транспортные средства).
Конструктивно двигатель состоит из неподвижного узла (индуктора) и вращающегося узла (якоря). На магнитопроводе индуктора расположены обмотки возбуждения. В двигателе смешанного возбуждения их две: параллельная с выводами Ш 1 и Ш2 и последовательная с выводами С1 и С2 (рис.6.2). Сопротивление параллельной обмотки Rовш составляет в зависимости от мощности двигателя от нескольких десятков до сотен Ом. Она выполнена проводом малого сечения с большим числом витков. Последовательная обмотка имеет малое сопротивление Robc (обычно от нескольких Ом до долей Ома), т.к. состоит из небольшого числа витков провода большого сечения. Индуктор служит для создания магнитного потока возбуждения при питании его обмоток постоянным током.
Обмотка якоря размещена в пазах магнитопровода и выведена на коллектор. С помощью щеток ее выводы Я I и Я 2 подключаются к источнику постоянного тока. Сопротивление обмотки якоря RЯ невелико (Омы или доли Ома).
Вращающий момент М двигателя постоянного тока создается при взаимодействии тока якоря Iя с магнитным потоком возбуждения Ф:
М=К × Iя × Ф, (6.1)
где К - постоянный коэффициент, зависящий от конструкции двигателя.
При вращении якоря его обмотка пересекает магнитный поток возбуждения и в ней индуктируется ЭДС Е, пропорциональная частоте вращения n:
Е = С × n × Ф, (6.2)
где С - постоянный коэффициент, зависящий от конструкции двигателя.
Ток в цепи якоря:
IЯ=(U–Е)/(RЯ+RОВС)=(U–С×n ×Ф)/(RЯ+RОВС), (6.3)
Решая совместно выражения 6.1 и 6.3 относительно п, находят аналитическое выражение механической характеристики двигателя n=F(М). Ее графическое изображение приведено на рисунке 6.1.
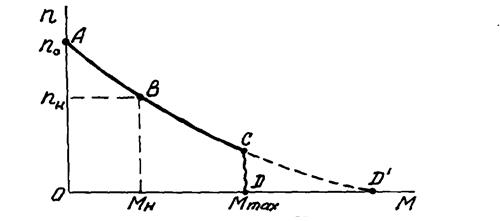
Рис. 6.1. Механическая характеристика двигателя постоянного тока смешанного возбуждения
Точка А соответствует работе двигателя вхолостую с частотой вращения nо. С увеличением механической нагрузки частота вращения снижается, а вращающий момент растет, достигая в точке В номинального значения МH. На участке ВС двигатель работает с перегрузкой. Ток Iя превышает номинальную величину, что приводит к быстрому нагреву обмоток якоря и ОВС, увеличивается искрение на коллекторе. Максимальный момент Мmах (точка С) ограничивается условиями работы коллектора и механической прочностью двигателя.
Продолжая механическую характеристику до пересечения в точке Д' с осью вращающего момента мы получили бы значение пускового момента при прямом включении двигателя в сеть. ЭДС Е равна нулю и ток в цепи якоря в соответствии с формулой 6.3 резко возрастает.
Для снижения пускового тока последовательно в цепь якоря включают пусковой реостат Rx (рис. 6.2) с сопротивлением:
Rx = UH / (1.3...2.5) ×IЯ.Н. - (RЯ - Robc), (6.4)
где Uh - номинальное напряжение сети;
IЯ.Н. - номинальный ток якоря.
Снижение тока якоря до (1.3...2.5)×IЯ.Н. обеспечивает достаточный начальный пусковой момент Мп (точка Д). По мере разгона двигателя сопротивление Rx уменьшают до нуля, поддерживая приблизительно постоянную величину Мп (участок СД).
Реостат RВ в цепи параллельной обмотки возбуждения (рис. 6.2) позволяет регулировать величину магнитного потока Ф (формула 6.1). Перед пуском двигателя его полностью выводят для получения необходимого пускового момента при минимальном токе якоря.
Используя формулу 6.3, определим частоту вращения двигателя
n = (U - IЯ • (RЯ + Robc + Rx)) / (С • Ф), (6.5)
в которой RЯ, Robc и С являются постоянными величинами, а U, IЯ и Ф можно изменять. Отсюда вытекает три возможных способа регулирования частоты вращения двигателя:
- изменением величины подводимого напряжения;
-изменением величины тока якоря с помощью регулировочного реостата Rx, который в отличие от пускового рассчитывается на продолжительный режим работы;
- изменением величины магнитного потока возбуждения Ф, который пропорционален току в обмотках ОВШ и ОВС. В параллельной обмотке его можно регулировать реостатом Rb. Сопротивление Rb принимают в зависимости от требуемых пределов регулирования частоты вращения RВ=(2...5) •Robш.
В паспортной табличке двигателя указывается номинальная частота вращения, которая соответствует номинальной мощности на валу двигателя при номинальном напряжении сети и выведенных сопротивлениях реостатов RX и RB.

