 2014-01-31
2014-01-31 1169
1169Классификация плоских кинематических пар
Материальное тело, перемещающееся в плоскости (движущееся плоско), имеет 3 степени свободы. Для определения положения тела необходимо определить три обобщённые координаты – X, Y, jZ (рисунок 15). При соединении звеньев в кинематические пары теряются 1 или 2 степени свободы. Поэтому плоские кинематические пары могут быть только 2 х классов: 1 го и 2 го.
Пример поступательной плоской кинематической пары показан на рисунках 6, 7. Пары низшие 2 го класса (одноподвижные) – потеряно 2 степени подвижности. Пример вращательной плоской пары 2 го класса показан на рисунке 8.
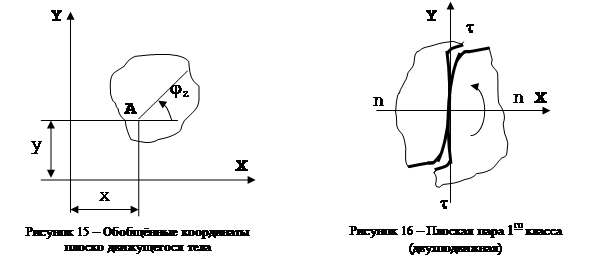 |
Примером высшей плоской кинематической пары 1 го класса (двухподвижной) является зацепление профилей зубьев эвольвентных колёс (рисунок 16). В этой паре потеряна одна степень подвижности – перемещение вдоль оси X. Возможно обкатывание профилей вокруг точки контакта и смещение вдоль оси Y.
Таблица 1- Примеры кинематических пар
| Число степеней свободы | Число связей Класс пары | Название | Рисунок | Условное изображение |
| Шар– плоскость | ||||
| Цилиндр – плоскость | ||||
| Шаровой шарнир | ||||
| Цилиндрическая | ||||
| Поступательная |
Если одно из звеньев кинематической цепи сделать неподвижным, кинематическая цепь превращается в механизм. В механизме рассматривают движение всех звеньев относительно неподвижного звена (стойки).
Механизмом называется кинематическая цепь, у которой одно звено неподвижно, а движение остальных звеньев относительно неподвижного определены или заданы.
В качестве неподвижного звена, как правило, выбирается корпус машины, хотя он может быть и подвижным (автомобиль, самолёт и т. д.).
Для выполнения анализа или проектирования механизма необходимо знать законы движения и положения всех звеньев, которые зависят от числа степеней свободы механизма, т. е. от числа обобщённых координат, определяющих законы движения и положения звеньев механизма.
Числом степеней свободы механизма называется число независимых параметров (обобщенных координат), определяющих положение всех его звеньев относительно станины.
Русским учёным Чебышевым П. Л. (1821-1894) были впервые выведены формулы, позволяющие определить число степеней свободы кинематической цепи или механизма в зависимости от числа звеньев и кинематических пар.

